Wetenschap
Zacht, multifunctionele robots worden erg klein
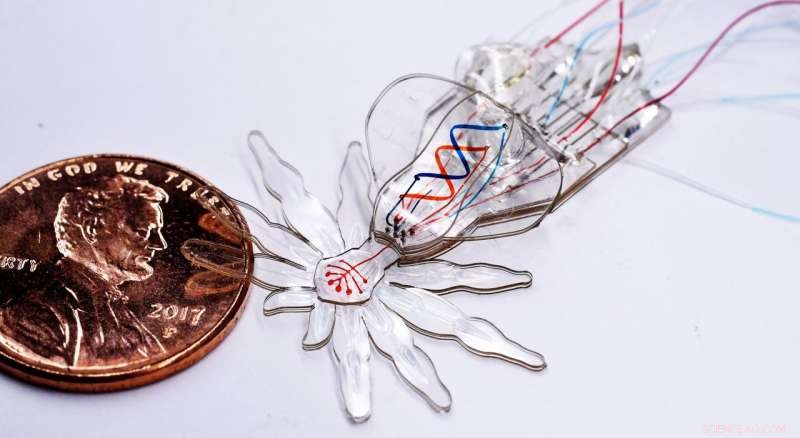
Een nieuw fabricageproces maakt het mogelijk om zachte robots op millimeterschaal te creëren met kenmerken op micrometerschaal, zoals hier getoond met het voorbeeld van een kleine zachte robotpauwspin met bewegende lichaamsdelen en gekleurde ogen en buik. Krediet:Wyss Institute aan de Harvard University
Robotici zien een toekomst voor zich waarin zachte, op dieren geïnspireerde robots kunnen veilig worden ingezet in moeilijk toegankelijke omgevingen, zoals in het menselijk lichaam of in ruimtes die te gevaarlijk zijn voor mensen om te werken, waarin starre robots momenteel niet kunnen worden gebruikt. Er zijn zachte robots van centimeters gemaakt, maar tot nu toe was het niet mogelijk om multifunctionele flexibele robots te fabriceren die op kleinere schaal kunnen bewegen en werken.
Een team van onderzoekers van het Wyss Institute for Biologically Inspired Engineering van Harvard, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), en Boston University heeft deze uitdaging nu overwonnen door een geïntegreerd fabricageproces te ontwikkelen dat het mogelijk maakt om zachte robots op de millimeterschaal te ontwerpen met functies op micrometerschaal. Om de mogelijkheden van hun nieuwe technologie te demonstreren, ze creëerden een robotachtige zachte spin - geïnspireerd op de millimetergrote kleurrijke Australische pauwspin - van een enkel elastisch materiaal met lichaamsvormende, beweging, en kleurkenmerken. De studie is gepubliceerd in Geavanceerde materialen .
"De kleinste zachte robotsystemen zijn nog steeds erg eenvoudig, met meestal maar één vrijheidsgraad, wat betekent dat ze slechts één bepaalde verandering in vorm of type beweging kunnen activeren, " zei Sheila Russo, doctoraat, co-auteur van de studie. Russo hielp het project op gang te brengen als een postdoctoraal onderzoeker in de groep van Robert Wood aan het Wyss Institute en SEAS en is nu assistent-professor aan de Boston University. "Door een nieuwe hybride technologie te ontwikkelen die drie verschillende fabricagetechnieken combineert, we hebben een zachte robotspin gemaakt die alleen is gemaakt van siliconenrubber met 18 vrijheidsgraden, veranderingen in de structuur, beweging, en kleur, en met kleine functies in het micrometerbereik."
Hout, doctoraat, is lid van de kernfaculteit en co-leider van het Bioinspired Soft Robotics-platform van het Wyss Institute en de Charles River Professor of Engineering and Applied Sciences bij SEAS. "Op het gebied van zachte robotapparaten, deze nieuwe fabricagebenadering kan de weg vrijmaken voor het bereiken van vergelijkbare niveaus van complexiteit en functionaliteit op deze kleine schaal als die van hun starre tegenhangers. In de toekomst, het kan ons ook helpen om structuur-functierelaties bij kleine dieren veel beter na te bootsen en te begrijpen dan starre robots dat kunnen, " hij zei.
In hun microfluïdische origami voor herconfigureerbare pneumatische/hydraulische (MORPH) apparaten, het team gebruikte eerst een zachte lithografietechniek om 12 lagen elastische siliconen te genereren die samen de materiële basis van de zachte spin vormen. Elke laag wordt nauwkeurig uit een mal gesneden met een laser-microbewerkingstechniek, en vervolgens gehecht aan de onderstaande om de ruwe 3D-structuur van de zachte spin te creëren.
De sleutel tot het transformeren van deze tussenstructuur in het uiteindelijke ontwerp is een vooraf bedacht netwerk van holle microfluïdische kanalen dat is geïntegreerd in individuele lagen. Met een derde techniek die bekend staat als injectie-geïnduceerd zelfvouwen, één set van deze geïntegreerde microfluïdische kanalen onder druk gezet met een uithardbare hars van buitenaf. Dit veroorzaakt individuele lagen, en met hen ook hun aangrenzende lagen, om plaatselijk in hun definitieve configuratie te buigen, die in de ruimte wordt gefixeerd wanneer de hars uithardt. Op deze manier, bijvoorbeeld, de gezwollen buik van de zachte spin en de naar beneden gebogen benen worden permanente kenmerken.
"We kunnen dit origami-achtige vouwproces nauwkeurig controleren door de dikte en relatieve consistentie van het siliconenmateriaal naast de kanalen over verschillende lagen te variëren of door op verschillende afstanden van de kanalen te lasersnijden. Tijdens het onder druk zetten, de kanalen fungeren dan als actuatoren die een permanente structurele verandering teweegbrengen, " zei eerste en corresponderende auteur Tommaso Ranzani, doctoraat, die de studie begon als een postdoctoraal onderzoeker in de groep van Wood en nu ook assistent-professor is aan de Boston University.
De resterende set geïntegreerde microfluïdische kanalen werd gebruikt als extra actuatoren om de ogen te kleuren en de abdominale kleurpatronen van de pauwspinsoort te simuleren door stromende gekleurde vloeistoffen; en om loopachtige bewegingen in de beenstructuren te induceren. "Dit eerste MORPH-systeem werd gefabriceerd in een enkele, monolithisch proces dat in enkele dagen kan worden uitgevoerd en gemakkelijk kan worden herhaald in inspanningen voor ontwerpoptimalisatie, ' zei Ranzani.
"De MORPH-benadering zou het gebied van zachte robotica kunnen openen voor onderzoekers die meer gericht zijn op medische toepassingen, waar de kleinere afmetingen en flexibiliteit van deze robots een geheel nieuwe benadering van endoscopie en microchirurgie mogelijk zouden maken, " zei Donald Ingber, oprichter van het Wyss Institute, MD, doctoraat
 Een nieuwe manier om zachte robots te maken:DNA-triggers die ervoor zorgen dat hydrogels van vorm veranderen
Een nieuwe manier om zachte robots te maken:DNA-triggers die ervoor zorgen dat hydrogels van vorm veranderen- Negatieve Celsius converteren naar Fahrenheit
- Goedkope legering concurreert met duur platina om brandstofcellen te stimuleren
- Subtiele veranderingen in de chemische structuur kunnen de toxiciteit van geneesmiddelen beïnvloeden
- Doorbraak in macromoleculaire machines voor actief gecontroleerde toediening van kankergeneesmiddelen
- Bossen bestrijden de opwarming van de aarde op manieren die belangrijker zijn dan eerder werd begrepen
- Jaag op overlevenden terwijl dodental Indonesische tsunami stijgt tot 373
- Dit is meer dan twee maanden salaris:'s werelds grootste diamant wordt geveild
- Wat is het verschil tussen een jet en een vliegtuig?
Een van de meest voorkomende soorten vliegtuigen die tegenwoordig worden gebruikt, is de jet, die grotendeels is vervangen door traditionele vliegtuigen met propellers. Hoewel propellervliegtuige
- Studie:het stoppen van de opwarming van de aarde is de enige manier om koraalriffen te redden
Hoofdlijnen
- Niet zo koude eend? Man blijft zoeken naar uitgestorven vogel
- De isovormen van het HP1-eiwit reguleren de organisatie en structuur van heterochromatine
- Slagen, grote oceaanreservaten moeten zowel het zeeleven als de mensen ten goede komen
- Controversiële onkruidverdelger houdt EU in de knoop (Update)
- Gregor Mendel - Vader van genetica: biografie, experimenten en feiten
- Welk enzym voegt nucleïnezuren toe aan de DNA-keten?
- Hoe CFU uit verdunning te berekenen
- Verschillende populaties bosolifanten bijna instorten in Centraal-Afrika
- Belangrijke feiten over het koninkrijk Monera
- Facebook, Twitter drong erop aan meer te doen aan politiehaat op sites

- Cambridge Analytica is slechts het begin, zegt data-expert
- Verbeterde hersenchip voor precisiegeneeskunde

- Het eerste slachtoffer van streaming-oorlogen:je portemonnee

- Hoe de Russische online censuur de internetvrijheid wereldwijd in gevaar kan brengen

 Facebook vereist dat kopers van politieke advertenties in het VK hun identiteit onthullen
Facebook vereist dat kopers van politieke advertenties in het VK hun identiteit onthullen- DNA naar röntgenfoto's:militairen hebben verschillende hulpmiddelen om overblijfselen te identificeren
- Hoe te om Staalmaat tot Duim te berekenen
- Onderzoekers onthullen het effect van nanodiamant op magnetorheologische vloeistoffen
- Eigenzinnig glaciaal gedrag uitgelegd
- Nieuwe aanvallen op grafische processors brengen de privacy van gebruikers in gevaar
- COVID, politiek en stemmen per post
- Onderzoekers ontwikkelen technologie om energie te halen uit het mengen van zoet- en zeewater
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
