Wetenschap
Zesbenige robots van Tokyo Techs komen dichter bij de natuur
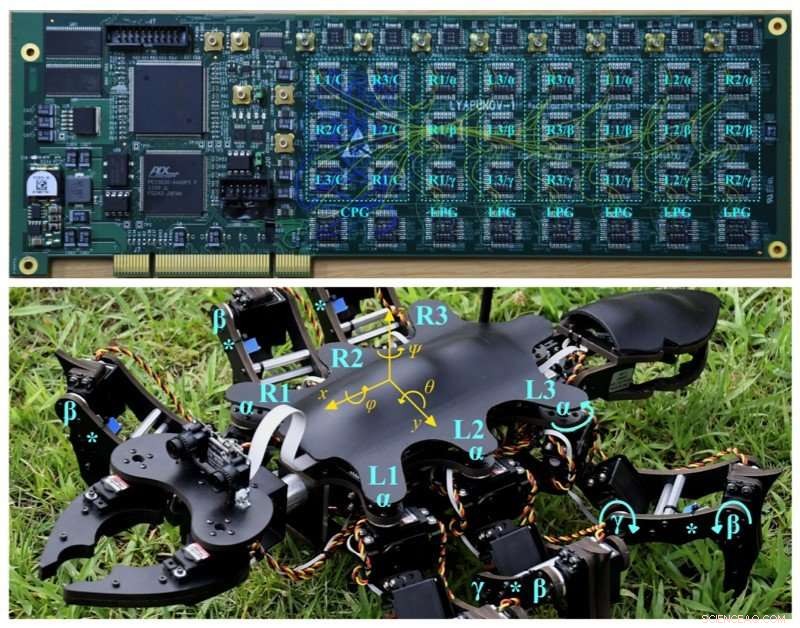
Aanzichten van de printplaat die de controller implementeert en van de robot. (Overgenomen met toestemming van gepubliceerd artikel). Krediet:IEEE-TOEGANG
Een onderzoek onder leiding van onderzoekers van het Tokyo Institute of Technology (Tokyo Tech) heeft nieuwe manieren ontdekt om meerbenige robots te besturen door middel van een tweetrapscontroller. De voorgestelde controller maakt gebruik van een netwerk van zogenaamde niet-lineaire oscillatoren waarmee verschillende gangen en houdingen kunnen worden gegenereerd, die worden gespecificeerd door slechts een paar parameters op hoog niveau. De studie inspireert tot nieuw onderzoek naar hoe meerbenige robots kunnen worden bestuurd, ook in de toekomst met behulp van brain-computer interfaces.
In de natuurlijke wereld, veel soorten kunnen over hellingen en onregelmatige oppervlakken lopen, het bereiken van plaatsen die zelfs voor de meest geavanceerde rover-robots ontoegankelijk zijn. Het blijft een mysterie hoe complexe bewegingen zo naadloos worden afgehandeld door zelfs de kleinste wezens.
Wat we wel weten, is dat zelfs de eenvoudigste hersenen patroongeneratorcircuits (CPG's) bevatten, die speciaal zijn bedraad voor het genereren van looppatronen. Pogingen om dergelijke circuits kunstmatig te repliceren hebben tot nu toe beperkt succes gehad, vanwege een slechte flexibiliteit.
Nutsvoorzieningen, onderzoekers in Japan en Italië stellen een nieuwe benadering voor voor het genereren van looppatronen, gebaseerd op een hiërarchisch netwerk van elektronische oscillatoren verdeeld over twee niveaus, die ze hebben aangetoond met behulp van een mierachtige hexapod-robot. De prestatie opent nieuwe wegen voor de besturing van pootrobots. Gepubliceerd in IEEE-toegang , het onderzoek is het resultaat van een samenwerking tussen wetenschappers van Tokyo Tech, gedeeltelijk gefinancierd door het World Research Hub Initiative, de Poolse Academie van Wetenschappen in Krakau, Polen, en de Universiteit van Catania, Italië.
De biologisch geïnspireerde controller bestaat uit twee niveaus. Op de top, het bevat een CPG, verantwoordelijk voor het beheersen van de algehele volgorde van beenbewegingen, gang genoemd. Aan de onderkant, het bevat zes lokale patroongeneratoren (LPG's), verantwoordelijk voor het controleren van de banen van de individuele benen.
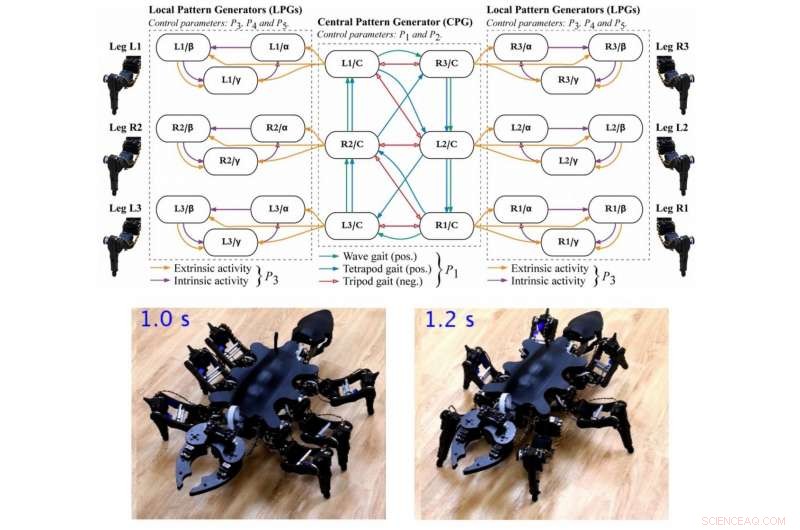
Boven:architectuur van de controller, met de centrale patroongenerator, die het algemene looppatroon regelt, en aan beide kanten de zes lokale patroongeneratoren, die de individuele beentrajecten regelen. Onder:Representatieve stilstaande beelden van de robot die loopt in een mierachtige houding (links) en een kakkerlakachtige houding (rechts). Krediet:IEEE-TOEGANG
De hoofdauteur van de studie, Ludovico Minati, die ook verbonden is aan de Poolse Academie van Wetenschappen in Krakau, Polen en uitgenodigd voor Tokyo Tech's Institute of Innovative Research (IIR) via het World Research Hub Initiative legt uit dat insecten hun gang snel kunnen aanpassen, afhankelijk van een breed scala aan factoren, maar vooral hun loopsnelheid. Sommige gangen worden vaak waargenomen en worden als canoniek beschouwd, maar in werkelijkheid, er is een bijna oneindig aantal gangen beschikbaar, en verschillende insecten zoals mieren en kakkerlakken realiseren vergelijkbare gangen in zeer verschillende houdingen.
Er zijn moeilijkheden ondervonden bij het proberen om zoveel complexiteit te condenseren in kunstmatige patroongeneratoren. De voorgestelde controller vertoont een extreem hoge mate van veelzijdigheid dankzij implementatie op basis van veldprogrammeerbare analoge arrays (FPAA's), die on-the-fly herconfiguratie en afstemming van alle circuitparameters mogelijk maken. Het bouwt voort op jaren van eerder onderzoek naar niet-lineaire en chaotische elektronische netwerken, die hun vermogen hebben aangetoond om fenomenen te repliceren die zijn waargenomen in biologische hersenen, zelfs wanneer bekabeld in zeer eenvoudige configuraties.
"Misschien was het meest opwindende moment in het onderzoek toen we zagen dat de robot verschijnselen en gangen vertoonde die we niet hadden ontworpen of verwacht, en ontdekte later dat ze ook voorkomen in biologische insecten, ", zegt Minati. Dergelijke opkomende verschijnselen doen zich vooral voor wanneer het netwerk wordt gerealiseerd met analoge componenten en een zekere mate van zelforganisatie mogelijk maakt, die een benadering vertegenwoordigen die enorm verschilt van conventionele engineering, waar alles a-priori is ontworpen en vast staat. "Dit brengt ons zo veel dichter bij de manier waarop biologie werkt, " hij voegt toe.
Yasuharu Koike, ook gebaseerd op het IIR, commentaar:"Een belangrijk aspect van de controller is dat hij zoveel complexiteit samenbrengt in slechts een klein aantal parameters. Deze kunnen worden beschouwd als parameters van hoog niveau, in die zin dat ze expliciet de gang bepalen, snelheid, houding, enz. Omdat ze dynamisch kunnen worden gewijzigd, in de toekomst moet het gemakkelijk zijn om ze in realtime te variëren met behulp van een hersencomputerinterface, waardoor de controle van complexe kinematica anders onmogelijk zou zijn om te domineren met de huidige benaderingen."
En Natsue Yoshimura, ook gebaseerd op het IIR, zegt:"Omdat de controller geleidelijk reageert en een biologisch plausibele benadering van patroongeneratie belichaamt, we denken dat het gemakkelijker is om te rijden in vergelijking met systemen die discrete commando's decoderen. Dit kan praktische gevolgen hebben, en ons lab heeft aanzienlijke knowhow op dit gebied."
 Simulatie van 195 miljoen jaar wereldklimaat in het Mesozoïcum
Simulatie van 195 miljoen jaar wereldklimaat in het Mesozoïcum- NASA ziet El Nino-omstandigheden heersen in de centrale Stille Oceaan
- Welke fijnstofverontreiniging vormt het grootste gezondheidsrisico?
- Hoe klimaatverandering en branden de bossen van de toekomst vormgeven
- Aarde saai miljard jaar stilstaand, stinkende oceanen waren misschien nogal dynamisch
Hoofdlijnen
- Louis Pasteur: Biografie, uitvindingen, experimenten en feiten
- De vreemde empathie van plaatsvervangende schaamte
- Onderzoek wijst achteruitgang van arctische kustvogels aan
- Nieuwe ontdekking daagt lang gekoesterde evolutietheorie uit
- Wat is een kruisverwijzingssysteem?
- Wat zijn specifieke biotechnologietoepassingen voor DNA-vingerafdrukken?
- orang-oetans, zoals mensen, geneeskrachtige planten gebruiken om gewrichts- en spierontsteking te behandelen
- Puget Sound-walvissen krijgen gratis een pauze van watersporters om walvissen te spotten
- Wetenschappers ontdekken eiwitten die stamcellen in hun ongedifferentieerde staat houden
- In een handelsoorlog, luchtvaartgigant Boeing kan een zittende eend zijn

- Nieuw systeem patcht beveiligingslekken die zijn opengelaten door privé-browsingfuncties van webbrowsers

- Vliegen door de veiligere lucht

- Facebook verdedigt het delen van gegevens na nieuw rapport over partnerdeals

- Nieuwe datawetenschapsmethode maakt grafieken in één oogopslag gemakkelijker te lezen


 Onderzoekers vinden een verrassing net onder het oppervlak in een koolstofdioxide-experiment
Onderzoekers vinden een verrassing net onder het oppervlak in een koolstofdioxide-experiment- Kunstmatige intelligentie werpt licht op het dark web
- Hoe Cubic Polynomials
- Nieuwe kantoren maken ons imagobewuster
- Landbouwparasiet neemt de genen van waardplanten over
- Manipulatie van de eigenschappen van magnetische materialen
- Donkere huidskleur maakt migrant veel moeilijker
- Nieuw verbeterd glasplaatje verandert microscopen in thermometers
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
