Wetenschap
Een op entropie gebaseerd sigmapunt Kalman-filter voor het schatten van de toestand van ruimtevaartuigen met niet-Gaussiaanse ruis
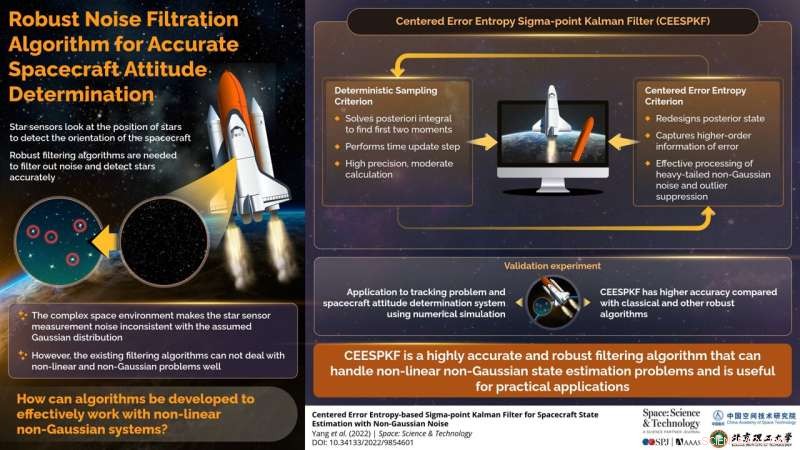
Infographic voor gecentreerde fout entropie-gebaseerde sigma-punt kalman-filter voor schatting van de toestand van ruimtevaartuigen met niet-gaussiaanse ruis. Credit:Ruimte:wetenschap en technologie
Een kinematicamodel voor de houding van een ruimtevaartuig, een model voor het meten van de houding en een filteralgoritme zijn drie belangrijke onderdelen bij het bepalen van de houding van ruimtevaartuigen, en een zeer nauwkeurig filteralgoritme is de sleutel tot het bepalen van de houding. Het klassieke sigmapunt Kalman-filter (SPKF) wordt veel gebruikt in een ruimtevaartuigtoestandsschattingsgebied met de Gaussiaanse witte-ruishypothese.
Hoewel het SPKF-algoritme goed presteert in ideale Gauss-witte ruis, zijn de feitelijke bedrijfsomstandigheden van het ruimtevaartuig in een baan om de aarde gecompliceerd. Ruimte-omgevingsinterferentie, jitter van het zonnepaneel en flikkeringsruis zorgen ervoor dat de ruis niet langer voldoet aan de Gauss-verdeling en een zware niet-Gaussiaanse situatie vormt, waar de klassieke SPKF-filtermethode niet langer van toepassing is en er een duidelijke verslechtering van de nauwkeurigheid zal zijn of zelfs het filteren van divergentie.
In een onderzoekspaper dat onlangs is gepubliceerd in Space:Science &Technology , een gezamenlijk team van de Army Engineering University of PLA en de Chinese Academie voor Militaire Wetenschappen, stelde een robuust Centered Error Entropy Unscented Kalman Filter (CEEUKF)-algoritme voor door het deterministische steekproefcriterium te combineren met het centered error entropiecriterium.
Allereerst introduceerde de auteur het klassieke SPKF-algoritme en het CEE-criterium. Het Kalman-filter (KF) is het optimale filter met het lineaire Gauss-raamwerk. Echter, werkelijke systemen zijn vaak niet-lineaire systemen en er is geen optimaal filteralgoritme voor niet-lineaire systemen. Alleen benaderende methoden kunnen worden gebruikt voor de niet-lineaire Gauss-systemen.
Het niet-lineaire filteralgoritme op basis van deterministische steekproefcriterium heeft een hogere precisie dan de linearisatie van niet-lineaire functie. De klassieke deterministische bemonsterings niet-lineaire Gauss-filtermethoden zijn ongeparfumeerd Kalman-filter (UKF), cubature Kalman-filter (CKF) en centraal differentieel Kalman-filter (CDKF). Omdat bij deze methoden deterministische punten worden bemonsterd, noemde de auteur ze SPKF-methoden.
Verder is de typische UT-methode gebruikt en wordt de UKF herzien. Klassieke UKF gebruikte de UT-methode om bemonsteringspunten te krijgen en het toestandsgemiddelde en foutcovariantie van een kansdichtheidsfunctie (PDF) te benaderen. De UKF-methode was gemakkelijker om PDF te benaderen dan een niet-lineaire functie. De stap voor het bijwerken van de tijd en de stap voor het bijwerken van de meting waren erin opgenomen.
Vervolgens nam de auteur de gewogen combinatie van de maximale correntropie (MC) en de minimale foutentropie (MEE) als de uitdrukking van CEE, waarvan was vastgesteld dat deze robuuster was dan de MEE- en MC-criteria.
Vervolgens leidde de auteur de op entropie gebaseerde UKF (CEUKF) af op basis van het CEE-criterium en zette hij zich in om dit algoritme uit te breiden naar niet-lineaire en niet-Gaussiaanse velden. De CEUUKF bevatte stappen voor het bijwerken van tijd en metingen. Voor het niet-lineaire systeem was de tijdupdate van het CEUUKF-algoritme hetzelfde als het klassieke UKF-algoritme, waarbij de sigmapuntbemonsteringsmethoden werden gebruikt om de tijdupdatestap uit te voeren.
De nieuwe stap voor het bijwerken van de meting is ontworpen op basis van twee hoofdwerken. Een daarvan is de vaststelling van het augmented-model en de andere is de schatting van de posterieure toestand door het CEE-criterium. Omdat de hogere-orde-informatie van de fout werd vastgelegd door het CEE-criterium, zouden CEESPKF's robuuster moeten zijn om niet-Gaussiaanse ruis aan te pakken dan CEEKF.
Daarna verifieerde de toepassing op het systeem voor het bepalen van de houding van het ruimtevaartuig de theorie van de auteur. De auteur introduceerde eerst het gyromodel, het houdingsbepalingssysteemmodel en het meetmodel. Vervolgens werden klassieke UKF, maximale correntropie ongeparfumeerde Kalman-filter (MCUKF), en de minimale foutentropie ongeparfumeerde Kalman-filter (MEEUKF) en de voorgestelde CEUUKF gebruikt om simulatie uit te voeren.
Bij Gaussiaanse ruis lag de filternauwkeurigheid van CEUUKF en MCUKF dicht bij die van de klassieke UKF-methode. De filternauwkeurigheid van MEUUKF was slecht vanwege de instabiliteit. In niet-Gaussiaanse ruis had het voorgestelde CEUUKF-algoritme de hoogste filternauwkeurigheid dan de klassieke UKF en andere robuuste algoritmen.
Bovendien had de CEUUKF ook de hoogste convergentiegraad. De filterresultaten van de traditionele UKF hadden de laagste filternauwkeurigheid en enkele grote geschatte fouten traden op verschillende tijdstippen op. De MCUKF had een beter filtereffect dan de traditionele UKF, maar was slechter dan de voorgestelde CEUUKF. Concluderend, vergeleken met de bestaande algoritmen, toonde CEUUKF zijn uitstekende prestaties bij de juiste keuze van kernelbandbreedtes in de simulatie van het schattingssysteem voor de houding van het ruimtevaartuig. + Verder verkennen
Een nieuw Kalman-filter voor het volgen van doelen in de ruimte
 Nieuwe studie kan helpen regenval tijdens El Nino . beter te voorspellen
Nieuwe studie kan helpen regenval tijdens El Nino . beter te voorspellen- Kan duurzame ontwikkeling samengaan met de huidige economische groei?
- 600 jaar oude zeespons bevat eeuwenoude klimaatrecords
- De omvang van het zee-ijs zakt naar recorddiepten aan beide polen
- Wat zijn de vijf biotische factoren van een aquatisch ecosysteem?
Hoofdlijnen
- Studie werpt licht op relatie tussen omgeving, hormonen en evolutie
- Anatomie en fysiologie van een synapsenstructuur
- Biologische experimenten op de gisting van gist
- De verschillen tussen Mendelian & Polygenic Traits
- Moleculaire atlas van een Australisch drakenbrein werpt nieuw licht op meer dan 300 miljoen jaar hersenevolutie
- Gemuteerd kikkergen stoot roofdieren af
- Hoe lepra werkt
- Angst voor haaien beïnvloedt zeewiergroei op Fijische koraalriffen
- Door geplande experimenten online te volgen, kunnen manieren worden gevonden om dierproeven te verbeteren
- Zwarte gaten belemmeren de groei van dwergstelsels

- Het bestuderen van radioactief aluminium in stellaire systemen ontsluit formatiegeheimen

- Hoe zijn dagen en nachten op de maan?

- Mijlpaal:Capsule met dummy aan boord van dokken bij ruimtestation (update)

- Hoe je de lancering van de Artemis I-maanraket van NASA kunt bekijken:tv-schema, streaming-info


 Hoe Density berekenen
Hoe Density berekenen - Wat is Quartz-uurwerk bij horloges?
- Hoe het gebied van een ruimte te berekenen
- Wetenschappers werken samen aan nieuwe studie om het universum te doorzoeken op tekenen van technologische beschavingen
- In het Braziliaanse Amazonegebied, savannisering en klimaatverandering zullen 12 miljoen mensen blootstellen aan dodelijke hittestress
- Wetenschappers vinden activiteit van voor de aardbeving in centraal Alaska
- Wat u moet weten over het laatste VN-rapport over klimaatverandering
- Onderzoekers bestuderen hoe Restaurant Day 's werelds grootste foodcarnaval werd
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
