Wetenschap
Software op Mars rover stelt het in staat om autonoom onderzoeksdoelen te kiezen
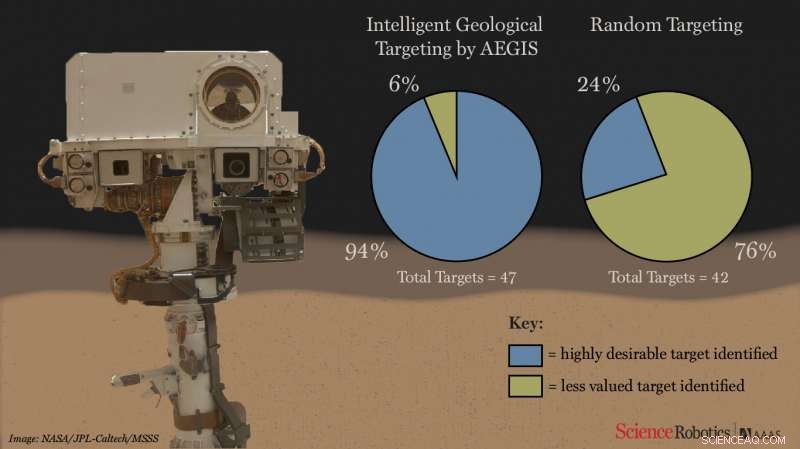
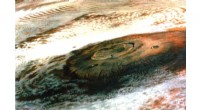
Slechts 21 nemen, 000 van de in totaal 3,8 miljoen regels code van de Curiosity-missie, AEGIS selecteerde in 93% van de gevallen nauwkeurig de gewenste doelen over 2,5 kilometer onontgonnen terrein op Mars, vergeleken met de 24% verwacht zonder de software. In dit geval, het gewenste doel was ontsluiting, een soort Martiaanse rots die ideaal is voor het analyseren van de geologische geschiedenis van de rode planeet. Krediet:Carla Schaffer / AAAS
(Phys.org)—Een team van onderzoekers uit de V.S., Denemarken en Frankrijk hebben een rapport opgesteld over het maken en gebruiken van software die bedoeld is om verkenningsrobots in de ruimte meer autonomie te geven. In hun artikel gepubliceerd in het tijdschrift Wetenschap Robotica , het team beschrijft de software, genaamd Autonomous Exploration for Gathering Enhanced Science (AEGIS), en hoe goed het presteerde op de Marsrover Curiosity.
Vanwege hun beperkte rekenkracht en afstand tot de aarde, ruimtewetenschappers zijn van mening dat het voor verkenningsrobots voordelig zou zijn om de mogelijkheid te hebben om te selecteren welke dingen ze moeten bestuderen. Het zou ook meer onderzoek mogelijk maken wanneer een robot niet in staat is om met de aarde te communiceren, zoals wanneer het zich aan de andere kant van een planeet bevindt. Zonder zo'n systeem, een robot zou een gebied moeten scannen, fotografeer het, stuur de fotografische beelden terug naar de aarde en wacht dan op instructies over wat te doen. Met een dergelijk systeem, een robot als Curiosity kan de horizon aftasten, kies een object om te bestuderen en rij er dan naar toe om het te bestuderen. Deze aanpak zou veel tijd besparen, waardoor de robot meer objecten kan bestuderen voordat zijn nuttige levensduur afloopt. Daarom, NASA heeft een team opdracht gegeven om dergelijke software te maken, die uiteindelijk AEGIS werd. De software werd getest en vervolgens geüpload naar Curiosity in mei 2016 en werd 54 keer gebruikt in de komende 11 maanden.
Met de software kan de rover besturen wat de ChemCam wordt genoemd, dat is een apparaat dat wordt gebruikt om rotsen of andere geologische kenmerken te bestuderen - een laser wordt op een doelwit afgevuurd en vervolgens meten sensoren de gassen die als resultaat optreden.
De onderzoekers melden dat ze vonden dat het systeem 93 procent nauwkeurig was, vergeleken met 24 procent zonder het gebruik ervan. De software, zij beweren, vele uren missietijd bespaard, die werd gebruikt voor andere nuttige activiteiten, zoals het bestuderen van meteorietinhoud. Ze melden ook dat de software een toename van ChemCam-targeting mogelijk maakte van 256 per dag naar 327, wat betekende dat er in dezelfde tijd meer gegevens werden verzameld.
-

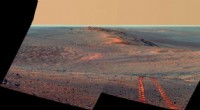
(A) De ChemCam-blik. (B) ChemCam schiet lasers op rotsen om hun inhoud te analyseren, zichtbare sporen achterlaten zowel op het oppervlak (rechtsboven) als in het boorgat met een diameter van 16 mm (midden) van deze “Windjana”-boorlocatie. (C) ChemCam-gemeten bodemdoelen. (D) De Remote Micro-Imager op ChemCam maakt high-focus foto's van verre doelen, zoals dit gebied in de alluviale waaier van Peace Vallis, ongeveer 25 km afstand. Krediet:Francis et al., Wetenschap. Robot. 2, eaan4582 (2017)
-
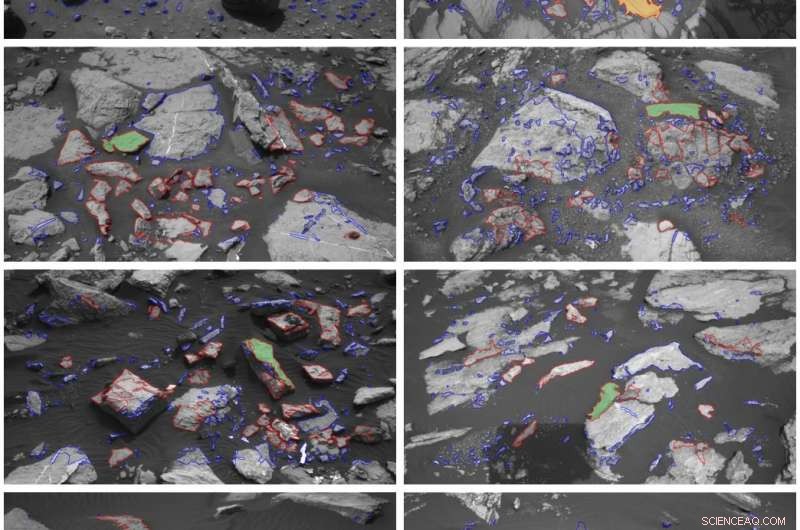
Voorbeelden van AEGIS-doelselectie, verzameld van Mars dag 1400 tot 1660. Targets in blauw geschetst werden afgewezen; die in rood geschetst werden behouden. Hoogst gerangschikte doelen zijn groen gearceerd, en tweede gerangschikte doelen zijn oranje gearceerd. Krediet:Francis et al., Wetenschap. Robot. 2, eaan4582 (2017)
-
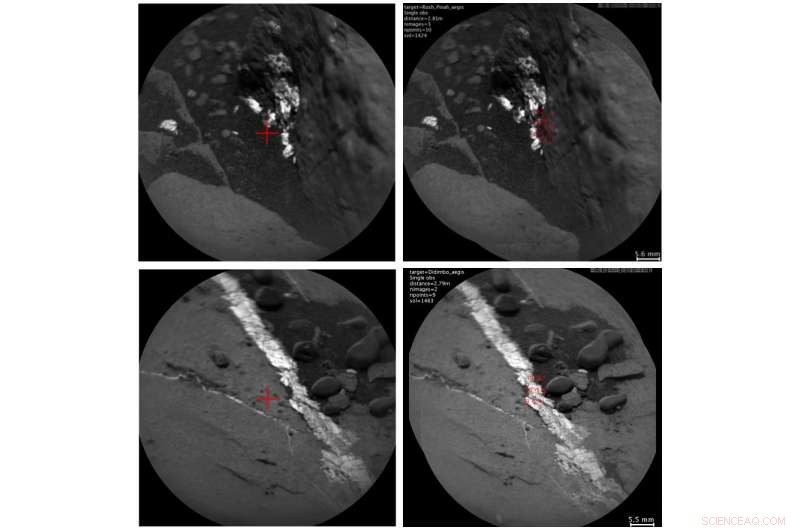
Voorbeelden van AEGIS die menselijke commando's corrigeert die het doel missen, "autonome aanwijsverfijning" genoemd. (EEN, C) Door mensen berekende doelen in het rood. (B, D) Doelverfijning door AEGIS aangegeven in rood. Krediet:Francis et al., Wetenschap. Robot. 2, eaan4582 (2017)
© 2017 Fys.org
 Human Vs. Primatenhanden
Human Vs. Primatenhanden- Big data gebruiken om rampen te bestrijden
- Nieuwe studie toont dominantie aan van lokale bronnen van luchtvervuiling in Delhi
- Vuursteen, De loodcrisis in Michigan had de stad in waterflessen moeten begraven. Dus, waarom niet?
- NASA-NOAA's Suomi NPP Satellite krijgt twee blikken op orkaan Maria
Hoofdlijnen
- Het gebruik van kwallenbloei als oplossing voor het maken van nieuwe producten
- De rol van Taq-polymerase in PCR
- Wetenschappers ontdekken dat darmbacteriën in bijen antibioticaresistente genen naar elkaar verspreiden
- Ambtenaren:GGO-muggen zijn geen drugs, EPA-toezicht nodig
- Wat gebeurt er met plantaardige en dierlijke cellen wanneer ze worden geplaatst in hypertone, hypotone en isotone omgevingen?
- Welke organellen bevinden zich in een prokaryote cel?
- Domme mensen zijn verrassend zelfverzekerd
- Zoogdier waarvan lang gedacht werd dat het uitgestorven was in Australië duikt weer op
- Celstructuren en hun drie belangrijkste functies
- Hubbles oogverblindende weergave van twee botsende sterrenstelsels

- NASA-ruimtevaartuig arriveert bij oude asteroïde, zijn eerste bezoeker
- Wat omhoog gaat, komt niet naar beneden:ruimteafval volgen van WA

- Van vulkanen op Mars tot steile hellingen op Mercurius - hoe plaatsen op andere werelden hun naam krijgen
- Als nieuwe sondes Mars bereiken, dit is wat we tot nu toe weten van reizen naar de rode planeet

 Zuid-Soedan lanceert mobiel geld om herstel na oorlog te stimuleren
Zuid-Soedan lanceert mobiel geld om herstel na oorlog te stimuleren- Hoe zonnepanelen te verwijderen van een dak
- Vuile data:bedrijven rekenen milieukosten van de digitale planeet
- NASA meet regenval in twee tropische cyclonen in Amerikaans Samoa
- Nieuwe techniek brengt twee gezichten van kleinste Janus-nanodeeltjes in kaart
- Nieuwe tool laat zien wat generatieve modellen weglaten bij het reconstrueren van een scène
- Deep learning maakt realtime beeldvorming om hoeken mogelijk
- Op weg naar ultrasnelle spintronica
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
