Wetenschap
Nieuwe ontwerpen voor springende en met vleugels klappende microrobots
De vleugel van de fruitvliegbot. Krediet:Bhushan &Tomlin.
Onderzoekers van de University of California (UC) Berkeley hebben onlangs twee microbots op insectenschaal ontworpen, een die springt en een andere die met zijn kunstmatige vleugels klappert. Deze robotontwerpen, gepresenteerd in twee papers die vooraf zijn gepubliceerd op arXiv, bootsen echt biologisch gedrag na dat wordt waargenomen bij insecten. De twee microbots, aangeduid als de fruitvliegbot en springende µbot, werden ontwikkeld door Ph.D. student Palak Bhushan als onderdeel van zijn scriptie onder begeleiding van zijn professor, Claire Tomlin.
In de toekomst, kleine robots kunnen tal van belangrijke toepassingen hebben, mensen helpen bij taken zoals teledetectie, op zoek naar overlevenden na natuurrampen, en ruimteonderzoek. In feite, microbots hebben verschillende gunstige eigenschappen, inclusief hun kleine formaat, insectachtige manoeuvreerbaarheid en gemakkelijker navigeren op uitdagende terreinen.
"De robuustheid op moeilijk terrein neemt over het algemeen toe naarmate een bot minder interactie heeft met de omgeving, "Bhushan en Tomlin vertelden" TechXplore . "Fliers en jumpers (bijv. vliegen, sprinkhanen, enz.) deze interactie te minimaliseren door over de obstakels te vliegen/springen en naar hun volgende bestemming te gaan, in tegenstelling tot mieren die over elk hobbeltje moeten lopen. Vliegers zijn relevanter voor de aarde en andere planeten met een dichte atmosfeer, terwijl jumpers relevanter zijn voor plaatsen met een verwaarloosbare tot geen atmosfeer en een lagere zwaartekracht."
De eerste robot ontwikkeld door de onderzoekers, die ze de fruitvliegbot noemen, is het eerste sub-milligram vleugelvoertuig ooit ontwikkeld dat de kinematica van insectenvleugels effectief nabootst. De meeste kleine microbots met klappende vleugels hebben tot nu toe een massaschaal van 100 mg. In de natuur, echter, kleine vliegende insecten (bijv. fruitvliegjes) hebben een massaschaal van 1 mg, en sommige kunnen zelfs nog kleiner zijn.

De 'fruitvlieg bot' vleugelpitch, bovenaanzicht. Krediet:Bhushan &Tomlin.
"De motivatie achter de ontwikkeling van deze specifieke microbot was om de groottekloof te overbruggen tussen wat is gemaakt en wat mogelijk is, " legden de onderzoekers uit. "Ons hoofddoel was om op deze schaal de bewegingen van de flappende vleugels te demonstreren met behulp van motoren en mechanismen aan boord, maar met externe elektrische stroom."
Kleine vliegende insecten genereren meestal lift door grote vleugelslagen uit te voeren. Een van de belangrijkste uitdagingen voor Bhushan en Tomlin bij het ontwikkelen van deze robot was het creëren van kleine actuatoren die voldoende grote rotaties kunnen genereren om de kunstmatige vleugels aan te drijven.
"Eerdere werken maken gebruik van motoren met kleine rotatie en versterken deze beweging vervolgens tot grote rotaties met behulp van een versterkingsmechanisme, " Bhushan en Tomlin leggen uit. "De functiegroottes in deze versterkingsmechanismen gaan tot 70um, zelfs voor bots van 100 mg. Het eenvoudigweg verkleinen van het ontwerp met 100x zou leiden tot een nog kleinere motorbeweging, wat op zijn beurt nog kleinere functiegroottes in het versterkingsmechanisme zou vereisen, wat niet haalbaar is."
Om problemen aan te pakken die verband houden met het verkleinen van het ontwerp van de microbot, de onderzoekers creëerden een motor met grote rotatie die geen versterkende mechanismen nodig heeft om te werken. Ze bereikten dit door een torsieveer te ontwikkelen waarin kleine rotaties van individuele cantilevers optellen om een grote rotatie te produceren wanneer ze bij resonantie worden aangedreven.

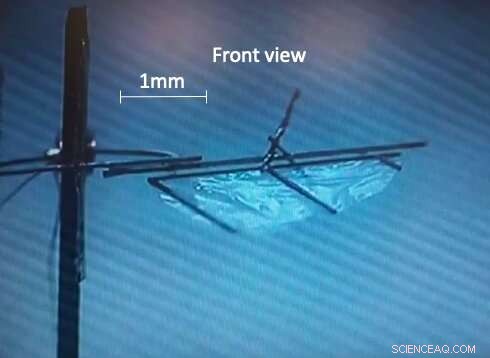
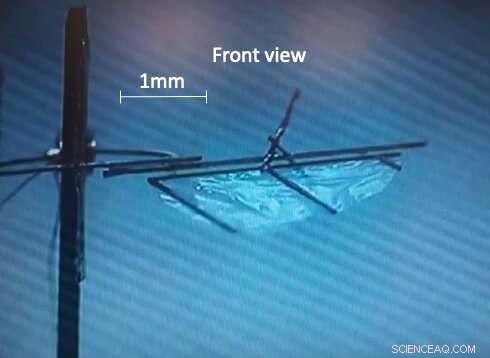
De 'fruitvlieg bot' vleugelpitch, vooraanzicht. Krediet:Bhushan &Tomlin.
Met het ontwerp van de onderzoekers, de afmetingen van de vliegende robot kunnen dalen tot slechts 100um, zelfs op de schaal van 1 mg. Opmerkelijk, hun fruitvliegbot kan in relatief korte tijd worden gefabriceerd. In aanvulling, zijn lage operationele spanning (d.w.z. 70 mV) zou het in de toekomst gemakkelijk moeten maken om te testen en te implementeren.
De tweede microbot die door de onderzoekers is ontwikkeld, is een springbot met een afmeting van 17 mm x 6 mm x 14 mm en een gewicht van 75 milligram. De vastgebonden versie van deze robot kan 6 keer per minuut springen, die perfect op zijn pootjes landt. Om 8 mm hoog te springen, de bot verbruikt ongeveer 6,4 mW aan stroom.
Net als de fruitvliegbot, deze kleine robot is de kleinste in zijn soort met zijn mogelijkheden, althans wat de onderzoekers betreft. In feite, de kleinste springende robot die in eerdere onderzoeken is gerapporteerd, heeft een ingebouwde krachtbron die ongeveer 300 mg weegt en maar één keer kan springen voordat zijn chemische krachtbron is uitgeput.
"We wilden iets ontwikkelen op de schaal van minder dan 100 mg dat herhaalbare sprongen zou kunnen maken, " zeiden de onderzoekers. "Merk op dat hier, aangezien we op een veel grotere schaal zitten in vergelijking met de fruitvliegbot, we kunnen ambitieuzer zijn en dus een stroombron aan boord hebben, ook."
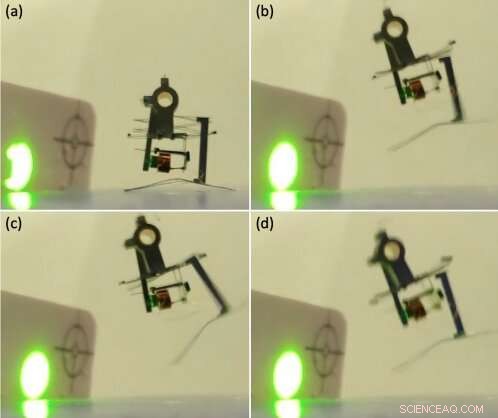
De springende µbot maakt een sprong met behulp van laserkracht. Krediet:Bhushan &Tomlin.
Kleine springende insecten duwen over het algemeen snel met hun poten over de grond tijdens het uitvoeren van een sprong. Deze onmiddellijke stroombehoefte is veel te hoog om te reproduceren met een ingebouwde motor. Om deze uitdaging te overwinnen, eerdere studies hebben motoren gebruikt om energie op te slaan in een ingebouwd mechanisme en deze energie vervolgens snel vrij te geven, waarmee de robot sprongen kan maken. In hun studie hebben de onderzoekers besloten ook om deze aanpak te gebruiken.
"Motoren zijn zwaar, moeilijk te fabriceren op kleine schaal, en speciale stuursignalen nodig hebben om ze te bedienen, "Bhushan en Tomlin zeiden. "Om fabricage en controle te vereenvoudigen, we hebben ervoor gezorgd dat ons ontwerp kan werken met een enkele motor door de andere vereiste functies passief te laten plaatsvinden, plus we ontwerpen onze motor om te werken met eenvoudige AAN/UIT-besturingssignalen om te functioneren."
In de springbot ontwikkeld door Bhushan en Tomlin, een enkele motor genereert een continue rotatiebeweging door kleine rotaties te accumuleren. Deze beweging wordt vervolgens gebruikt om een snaar op te winden die is ontworpen om een veer in een energieopslagmechanisme te trekken. Nadat de energie een bepaalde drempel heeft bereikt, het mechanisme geeft de opgeslagen energie van de robot snel vrij, waardoor het uiteindelijk kan springen.
"De eenvoudige regelvereiste van onze motor stelt ons in staat om hem van stroom te voorzien met behulp van 1 mg fotovoltaïsche cellen die stroom produceren wanneer een infraroodlaser erop schijnt, maar deze stroombron is slechts een tijdelijke aanduiding voor toekomstige microbatterijen wanneer ze beschikbaar komen, "voegden de onderzoekers eraan toe.

De springende µbot. Krediet:Bhushan &Tomlin.
De meeste bestaande bots met een schaal van 100 mg gebruiken piëzo-elektrische en elektrostatische actuatoren die hoge spanningen van 200-5000V nodig hebben om te werken. Dit betekent dat ze vaak worstelen met de zware en inefficiënte spanningsversterkende circuits die worden gebruikt om ze aan te drijven. Volgens de onderzoekers is dit is de belangrijkste reden waarom tot nu toe maar heel weinig volledig tether-less microbots met succes zijn gemaakt.
"We hebben met succes nieuwe elektromagnetische actuatoren ontworpen, die een magneet plus spoelsysteem zijn, net als in je koptelefoon, die lage spanningen nodig hebben om te werken - slechts 0,07 V voor de fruitvliegbot, en 0.8V voor de springbot, "Bhushan en Tomlin zeiden. "Dus, wanneer we in de toekomst goede microbatterijen zullen hebben (nu niet), onze bots zullen veel lichter zijn en veel minder stroom verbruiken om te functioneren."
Om effectief te kunnen opereren, alle 1 mg-schaal bots, evenals verschillende bots op 100 mg-schaal, vereisen een speciale 'gecontroleerde' omgeving, bijvoorbeeld gekenmerkt door een veranderend extern magnetisch veld, een hete plaat of een trilplaat. De actuatoren die door deze fruitvliegbot en springbot worden gebruikt, anderzijds, zijn aan boord, dus deze kleine robots presteren ook goed in reguliere omgevingen.
Indrukwekkend, de onderzoekers waren in staat om het kleinste tot nu toe gerapporteerde spanwijdte-apparaat te maken, die dezelfde massa heeft als een fruitvlieg. Ze hebben ook met succes de lichtste ongebonden springbot ontworpen met een ingebouwde stroombron die tot nu toe is ontwikkeld.
Vleugelfladderende robotvleugel. Krediet:Bhushan &Tomlin.
Momenteel, batterijen kunnen nog steeds geen vliegende robots van 100 mg ondersteunen, het kan dus enige tijd duren voordat de onderzoekers hun 1 mg-schaal vliegende bot met succes van stroom hebben voorzien. Bovendien, de motor van de bot heeft een energie-efficiëntie van 0,7 procent, terwijl de spieren van een fruitvlieg een efficiëntie van 17 procent hebben.
In hun toekomstige werk, de onderzoekers zijn van plan zich te concentreren op de ontwikkeling van efficiëntere motoren, om hun ontwerp verder te perfectioneren en zich voor te bereiden op het moment dat batterijen die klein genoeg zijn om hun bot te ondersteunen eindelijk worden vrijgegeven. Ze willen ook low-power sub-0.1 mg sensoren en controllers maken, omdat dit hen in staat zou stellen hun fruitvliegbot autonoom te maken.
"Wat betreft de springbot, we zijn van plan om een horizontale component toe te voegen aan de lanceringssnelheid die de bot kan helpen bij het navigeren, " Bhushan en Tomlin legden uit. "Gezien de lage stroomvereisten van deze bot en een groter formaat in vergelijking met de fruitvliegbot, we moeten er ook bestaande batterijen aan kunnen toevoegen om hem volledig zelfvoorzienende sprongen te laten maken."
© 2019 Wetenschap X Netwerk
 Ongebruikelijke suiker van cyanobacteriën werkt als natuurlijk herbicide
Ongebruikelijke suiker van cyanobacteriën werkt als natuurlijk herbicide- Chemici ontwikkelen hydrogelsnaren met behulp van verbindingen die in zeedieren worden gevonden
- Enzymboost kan de productie van biobrandstoffen en andere bioverwerkte materialen versnellen
- Revolutionaire nieuwe materialen voor roerige koolstoftijden:superfilters die de wereld zich kan veroorloven
- Betere oplossingen voor het maken van waterstof liggen misschien net aan de oppervlakte
- Aardwetenschappers roepen op tot preventie- en waarschuwingssystemen voor overstromingen in de Himalaya
- Pacific Northwest zet zich schrap voor recordbrekende hittegolf
- Vingerafdrukken van de originele bouwstenen van de aarde ontdekt in diamanthoudende rotsen
- Voordelen en nadelen van Honeybees
- De natuurlijke omgeving van Afrikaanse leeuwen
Hoofdlijnen
- Walvissen en dolfijnen hebben rijke mensachtige culturen en samenlevingen
- De sleutelrol van enzymen in de embryonale ontwikkeling begrijpen
- Wetenschappers vinden bewijs van onze beste vrienden, honden, op dezelfde manier aangepast aan malaria in Afrika
- Antibioticaresistentie:slapende bacteriën die medicamenteuze behandeling kunnen overleven geïdentificeerd
- Dierenartsen voeren de eerste bekende hersenoperatie uit om hydrocephalus bij pelsrobben te behandelen
- Het overdrachtspotentieel van vliegen kan groter zijn dan gedacht, onderzoekers zeggen:
- Herziening van historische voorraadroutes kan zeldzame stukken inheemse planten en dieren in gevaar brengen
- Welke organen helpen het menselijk lichaam om zich te ontdoen van door cellen geproduceerd afval?
- Maleisië omarmt het werk van Melanies aan de illegale handel in wilde dieren
- Netwerkorkestratie:onderzoeker gebruikt muziek om netwerken te beheren

- Frankrijk onderzoekt zwarte dozen van Boeing terwijl vliegtuigen wereldwijd aan de grond staan (update)

- Australisch bedrijf dat dol is op stoffen gemaakt van microbiële cellulose afgeleid van kokosafval

- Waarom we van robothonden houden, poppen en poppen

- Zwarte Facebook-medewerkers klagen over racisme, discriminatie is erger geworden


 Hotel Ruthenium:hoe waterstof incheckt maar nooit weggaat
Hotel Ruthenium:hoe waterstof incheckt maar nooit weggaat- Verbeterde 3D-nanoprinttechniek om nanoskyscrapers te bouwen
- Waarom magnetisme in bepaalde materialen anders is in atomair dunne lagen en hun bulkvormen?
- Belangrijkste soorten alcohol
- Nieuwe micro-supercondensatorstructuur geïnspireerd op het ingewikkelde ontwerp van bladeren
- Moleculaire structuur van anti-verouderingseiwit alfa Klothos onthuld
- Chemici warmen zich op voor preprint-servers
- Voorbereiding op de SAT
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
