Wetenschap
Een onderzeese robot testen die olielekkages kan detecteren en in kaart brengen

Het oog van deze drone toont MBARI's onderzoeksschip Paragon (links) en een autonoom onderwatervoertuig over lange afstand (klein object uiterst rechts) dat een stukje biologisch afbreekbare kleurstof volgt in Monterey Bay. Krediet:Todd Walsh/MBARI
Eind september 2018, MBARI-ingenieurs demonstreerden een nieuw gebruik voor MBARI's lange-afstands autonome onderwatervoertuigen (LRAUV's) - het detecteren en volgen van olielozingen. Werken met de Amerikaanse kustwacht en medewerkers bij Woods Hole Oceanographic Institution (WHOI), MBARI-ingenieurs hebben een LRAUV uitgerust met speciale instrumenten (fluorometers) die olie in water kunnen detecteren. Voor de recente test in Monterey Bay, het team simuleerde een olieramp met behulp van niet-giftige, biologisch afbreekbare kleurstof.
Tegenwoordig is de kustwacht vooral geïnteresseerd in het testen van robots die olielekkages onder ijs kunnen opsporen en volgen. Deze capaciteit zal nodig zijn naarmate het scheepvaartverkeer en de olie-exploratie zich uitbreiden in de Noordelijke IJszee. De LRAUV die in deze experimenten werd gebruikt, had ook instrumenten waarmee het voertuig onder zee-ijs kan navigeren door geluidsgolven van de onderkant van het ijs te laten weerkaatsen.
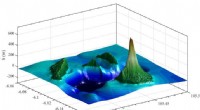
Voor zijn recente test in Monterey Bay, de LRAUV werd in het water geplaatst en naar de pluim gestuurd. Nadat instrumenten op de LRAUV de pluim hadden gedetecteerd, de robot vervolgde zijn weg, het meten van de kleurstofconcentraties in de pluim en het opnemen van de gebieden met de hoogste intensiteit. Toen de robot de buitenrand van de pluim kruiste, het draaide automatisch om en ging terug naar de pluim.
Door dit herhaaldelijk te doen, de robot kon de pluim volgen terwijl deze enkele uren door het water dreef. Deze test toonde aan dat de robot kon voldoen aan de aanvankelijke doelstellingen van de kustwacht voor het voertuig.
"Alles werkte goed tijdens de veldtest." zei Brett Hobson, MBARI's hoofdonderzoeker bij dit project. "Het volgen van de pluim heeft nog een kleine aanpassing nodig, maar daar werken we aan." Hobson werkte samen met verschillende andere MBARI-ingenieurs aan dit project, waaronder Brian Kieft en Yanwu Zhang. MBARI Audio Video Specialist Todd Walsh bestuurde een drone vanuit de lucht die de kleurstofpluim vanuit de lucht fotografeerde.

Tijdens het recente kleurstofexperiment, MBARI-onderzoekers lieten biologisch afbreekbare kleurstof los van het onderzoeksschip Paragon (links) terwijl medewerkers van de Amerikaanse kustwacht en andere organisaties toekeken vanaf een tweede boot in de buurt. Krediet:Todd Walsh/MBARI
Dit onderzoek werd gefinancierd door een subsidie van het Amerikaanse ministerie van Binnenlandse Veiligheid aan Jim Bellingham, directeur van het Center for Marine Robotics bij WHOI. In zijn vorige functie als ingenieur bij MBARI, Bellingham bedacht en hielp bij het ontwerpen van de eerste LRAUV. Na de recente veldtesten, de nieuwe LRAUV voor het opsporen van olielekkages werd overhandigd aan onderzoekers van de WHOI en de kustwacht voor aanvullende tests.
De huidige studie bouwt voort op een eerdere MBARI-inspanning om olie op te sporen in de diepe wateren van de Golf van Mexico na de olieramp met de Deepwater Horizon, met behulp van een van MBARI's grotere autonome onderwatervoertuigen van de "Dorado-klasse".
 Kunstmatige intelligentie om de wetenschap van het aardsysteem te stimuleren
Kunstmatige intelligentie om de wetenschap van het aardsysteem te stimuleren- Wrijvingswetten getest in de instortende krater van een uitbarstende vulkaan
- Franse politie op Mont Blanc probeert klimmers in het gareel te houden
- India's vuurwerkcentrum getroffen door anti-vervuilingsactie
- Satelliet laat zien dat dit een grote orkaan voor je ontketent, Oostelijke Stille Oceaan
Hoofdlijnen
- Hoe zijn bacteriën en plantencellen gelijk?
- Wat is het voordeel van het gebruik van vlekken om naar cellen te kijken?
- Niet zo koude eend? Man blijft zoeken naar uitgestorven vogel
- Voorbeelden van hittebestendige bacteriën
- Hoe Royal Jelly wordt geoogst?
- Anatomy & Physiology Project Ideeën
- Hoe maak je een 3D-plant eukaryotisch celmodel
- Wat is er nodig voor de glycolyse?
- Het huidige begrip van dierenwelzijn sluit momenteel vissen uit, ook al voelen vissen pijn
- Nieuw gepubliceerde gegevens geven een duidelijker beeld van de instorting van de vulkaan
- Waarom de centrale Pacific El Nino moeilijker te voorspellen is dan de oostelijke Pacific El Nino
- Suomi NPP vindt dat de tropische depressie Haikui verdwijnt
- Bergen creëren biodiversiteit

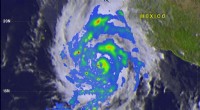
- Gevaarlijke orkaan Willa onderzocht door NASA en de Japanse GPM-satelliet

 Nieuwe keramische nanovezelsponzen kunnen worden gebruikt voor flexibele isolatie, water Zuivering
Nieuwe keramische nanovezelsponzen kunnen worden gebruikt voor flexibele isolatie, water Zuivering- De Sint-Basiliuskathedraal van Moskou in 7 verschillende bouwstijlen
- Nederlandse astronomen fotograferen bij toeval mogelijke peuterplaneet
- Groene functionalisering van koolstof-waterstofbindingen
- Geleerden:Indonesisch proces voor onderzoeksvergunningen dreigt buitenlandse wetenschappers af te schrikken
- Nieuwe methode optellen en aftrekken voor duurzaamheids ware maat
- Veranderingen in koolstof in de bodem in overgangsgebieden suggereren behoud voor Amazon, wetenschappers zeggen:
- Lady Luck:Leidt antropomorf geluk tot riskant financieel gedrag?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
