Wetenschap
Hoe wordt de Space Robot geleerd om taak uit te voeren in de ruimte?
1. Ontwerp en ontwikkeling:
* Doelspecifiek ontwerp: Robots zijn gebouwd met specifieke taken in gedachten. Een robot die is ontworpen om monsters van een asteroïde te verzamelen, heeft bijvoorbeeld verschillende functies dan een robot die is ontworpen om een satelliet te repareren.
* Autonome mogelijkheden: Robots zijn geprogrammeerd met geavanceerde software waarmee ze beslissingen kunnen nemen, navigeren en taken kunnen uitvoeren met minimale menselijke interventie.
* redundantie en robuustheid: De ruimte is hard en meedogenloos. Robots zijn gebouwd met back -upsystemen, ontslagen en robuuste materialen om extreme omstandigheden te weerstaan.
2. Training en simulatie:
* Virtuele omgevingen: Robots worden getraind in realistische simulaties die de ruimte voor het ruimte bieden, inclusief zwaartekracht, straling en extreme temperaturen.
* Fysieke prototypes: Naast virtuele simulaties worden fysieke prototypes gebruikt om robotbewegingen, sensormogelijkheden en hoe ze omgaan met objecten te testen.
* Teleoperatie: In sommige gevallen kunnen robots op afstand worden gecontroleerd door mensen. Dit zorgt voor een hogere mate van controle, maar verhoogt ook de complexiteit van de missie.
3. Testen en validatie:
* grondtests: Robots ondergaan uitgebreide testen in op de grond gebaseerde faciliteiten om ervoor te zorgen dat ze goed functioneren in de beoogde omgeving.
* SpaceFlight -tests: Robots worden soms gelanceerd op kleinere missies om hun functionaliteit in de ruimte te testen voordat ze worden toegewezen aan meer kritische rollen.
4. On-the-job leren:
* Adaptieve algoritmen: Sommige robots kunnen hun gedrag aanpassen op basis van feedback en leren van hun ervaringen.
* Gegevensanalyse: Robots verzamelen gegevens uit hun omgeving, die door ingenieurs worden geanalyseerd om hun prestaties te verbeteren.
betrokken belangrijke technologieën:
* kunstmatige intelligentie (AI): Gebruikt voor besluitvorming, navigatie en probleemoplossing.
* robotica: De wetenschap en technologie van robotontwerp, constructie, werking en toepassing.
* Computer Vision: Staat robots in staat om hun omgeving te "zien" en te interpreteren.
* Sensorsystemen: Geef robots informatie over hun omgeving, inclusief temperatuur, druk en nabijheid van objecten.
* Software Engineering: Ontwikkelt de software die de robots beheert en exploiteert.
Uitdagingen:
* Afstand: Communicatie tussen aarde en robots in de ruimte kan worden vertraagd, waardoor realtime controle uitdagend is.
* harde omgeving: Ruimte vormt extreme omgevingsuitdagingen zoals straling, temperatuurschommelingen en vacuüm.
* Onvoorspelbaarheid: Ruimte is een dynamische omgeving en robots moeten zich kunnen aanpassen aan onverwachte gebeurtenissen.
Voorbeelden van ruimtevaartroBots:
* Mars Rovers (nieuwsgierigheid, doorzettingsvermogen): Verken het Martian -oppervlak, verzamel gegevens en monsters.
* International Space Station (ISS) Robots: Help astronauten met taken zoals onderhoud en reparaties.
* Hubble Space Telescope Servicing Robots: Reparaties en upgrades op de Hubble Space Telescope uitgevoerd.
De ontwikkeling en training van ruimtevaartroBots is een complex en continu proces, maar de potentiële voordelen voor exploratie, onderzoek en toekomstige menselijke missies in de ruimte zijn enorm.
 Sterke signalen laten zien hoe eiwitten komen en gaan
Sterke signalen laten zien hoe eiwitten komen en gaan- Wat is de natuurlijke neiging van moleculen om zich gelijkmatig door een kamer te verspreiden?
- Onderzoekers maken waterstofbrandstof uit zeewater
- Halogeenbinding-gemedieerde metaalvrije gecontroleerde kationische polymerisatie
- Hoe robotwiskunde en smartphones onderzoekers naar een doorbraak in de ontdekking van medicijnen hebben geleid
- Lijden in de hitte - de toename van mariene hittegolven schaadt oceaansoorten
- Duurzame palmolie haalt het niet
- Welk object wordt in deze zin gepersonifieerd:de ondergaande zon vertelde me dat het tijd was om naar het kamp te gaan?
- Evacuatiebesluitvorming:hoe mensen keuzes maken bij rampen
- Dieren die afhankelijk zijn van Tides for Survival
Hoofdlijnen
- Relatie tussen DNA en natuurlijke selectie
- Man of vrouw? Wetenschappers ontdekken het genetische mechanisme dat de geslachtsontwikkeling bij vlinders bepaalt
- Wat zijn de drie voedingscycli die vooral prominente rollen spelen?
- Wat zijn structuren in verschillende organismen die een gemeenschappelijke afkomst delen?
- Inzicht in cellulaire transcriptiereacties op zuurstofgebrek
- Alle lipiden zijn wat?
- Wat is het gevoelige deel van een smaakcel?
- Hoe verspreiden microben zich wereldwijd? Een onderzoek maakt duidelijk hoe ze de wereld rondreizen
- Wat is de wetenschappelijke naam voor PBO?
- Een nieuw hulpmiddel om fundamentele zaken te onderzoeken
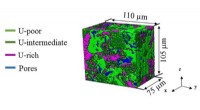
- Wetenschappers krijgen een ongekend beeld van bestraalde splijtstof
- Belle II meet eerste deeltjesbotsingen

- Gebruik van fotonica voor detectie van ziekten thuis
- Hoe hangen vissen en vogels samen? Onderzoekers vinden het antwoord is een wake met een doel

 Wat staat hy hoi lo duh dus voor in de wetenschap?
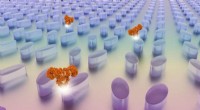
Wat staat hy hoi lo duh dus voor in de wetenschap? - Paren van silicium nanocilinders kunnen het magnetische veld van licht lokaal creëren en verbeteren
- Nieuwe stabiele vorm van plutonium ontdekt
- De Prosecco-heuvels van Italië staan op de UNESCO Werelderfgoedlijst
- NASA observeert tropische storm Matmo in Noord-Centrale Golf van Bengalen
- Hacky hack hack:Australische tiener maakt inbreuk op het beveiligde netwerk van Apple
- Biologisch afbreekbare kunststoffen uit palmolieafval
- Kunstmatig netvlies kan ooit helpen het gezichtsvermogen te herstellen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
