Wetenschap
Hoe omgevingskenmerken het robotbewustzijn kunnen vergroten
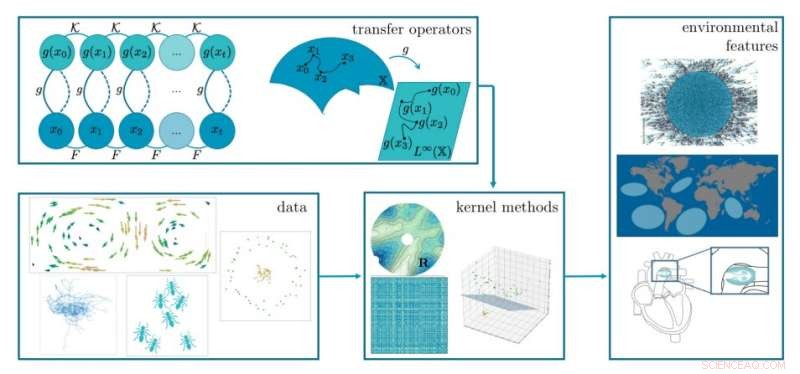
Diagram van samenspel tussen gegevens, overdrachtsoperators, kernelmethoden en omgevingskenmerken. Transferoperators vertegenwoordigen dynamische systemen, waarbij een toestand x ∈ X wordt opgetild naar een ruimte L∞X en g(x) geeft fysieke eigenschappen van het systeem. Veel systemen worden gedefinieerd door gegevens die complexe patronen vertonen, zoals twee geneste ringen, stromen in oceanen, taxitrajecten en biologisch gedrag. Kernelmethoden transformeren deze gegevens naar een alternatieve ruimte met behulp van kernelfuncties. Gegevens zijn dan gemakkelijker te interpreteren, bijvoorbeeld door twee geneste ringen te scheiden of door een Gram-matrix te maken voor gebruik in een kernelalgoritme. Overdrachtsoperators worden weergegeven door middel van kernelmethoden door dynamische systemen in een kernelruimte in te bedden. R. Kernel-algoritmen extraheren omgevingskenmerken van transferoperators, zoals waar mensen de neiging hebben om samen te komen in menigten, gebieden met gyres in oceanen of patronen van bloedstroom in harten . Krediet:Salam, Edwards en Hsieh.
In de afgelopen jaren hebben robotici een verscheidenheid aan systemen gecreëerd die uiteindelijk in echte omgevingen zouden kunnen werken. Omdat de meeste situaties in de echte wereld, met name openbare ruimtes, dynamisch en onvoorspelbaar zijn, moeten robots om efficiënt door deze omgevingen te navigeren een goed begrip van hun omgeving kunnen krijgen.
Onderzoekers van het GRASP-laboratorium van de Universiteit van Pennsylvania hebben onlangs een onderzoek uitgevoerd om te onderzoeken hoe functies die verband houden met een bepaalde omgeving het bewustzijn van een robot en zijn vermogen om door zijn omgeving te navigeren, kunnen verbeteren. Hun paper, vooraf gepubliceerd op arXiv, was gebaseerd op twee van hun eerdere onderzoeksinspanningen.
De eerste van deze eerdere studies introduceerde een reeks strategieën die omgevingsinformatie gebruikten om de autonomie van een robot te vergroten bij het uitvoeren van een specifieke taak, namelijk het lokaliseren van de bron van een chemische lekkage in turbulente stromingen. Aan de andere kant introduceerde het team als onderdeel van de tweede studie een nieuw controlebeleid op agentniveau dat gebruikmaakte van omgevingskenmerken of ruis om een gewenste ruimtelijke verdeling van detectierobotagent in een geofysische stromingsomgeving te behouden.
"Onze eerdere werken waren gericht op Lagrangiaanse coherente structuren, een belangrijk kenmerk van dynamische systemen in veel toepassingen zoals oceanografie en weersvoorspelling, en hoe ze kunnen worden gebruikt in robotica," vertelde Tahiya Salam, een van de onderzoekers die het onderzoek uitvoerde. TechXplore. "Ons nieuwe werk richt zich op hoe een vergelijkbare functie, coherente sets, online kan worden geleerd en nieuwe benaderingen voor hoe deze functies kunnen worden gebruikt in robottoepassingen, zoals menigtemonitoring in stedelijke omgevingen en energiezuinige navigatie in water."
In hun nieuwe studie gebruikten Salam en de andere onderzoekers van het GRASP Laboratory een reeks technieken die globale dynamische benaderingen combineren met machine learning. In deze context verwijst de term 'globale dynamiek' naar de algemene dynamiek van een bepaalde omgeving en de kenmerken die deze dynamiek kenmerken.
"De techniek die we gebruikten stelde ons in staat om globale functies te leren van gegevens die zijn verzameld uit de omgevingen waarin robots opereren", legt Salam uit. "De globale kenmerken, coherente verzamelingen genoemd, hebben interessante eigenschappen; ze vertegenwoordigen namelijk regio's die zich heel langzaam verspreiden. Met behulp van deze informatie over regio's die zich heel langzaam verspreiden, kunnen robots deze functies gebruiken voor het nemen van beslissingen."
Salam en haar collega's hebben deze zogenaamde 'coherente sets' online berekend met behulp van machine learning-technieken. Vervolgens ontwierpen ze een raamwerk dat het gedrag van een robot kon controleren op basis van de omgevingskenmerken die ze berekenden.
"We hebben een manier gevonden om coherente sets in realtime te berekenen zonder gedetailleerde informatie over een model dat de omgeving beschrijft", legt Salam uit. "Bovendien konden we deze samenhangende sets op slimme manieren gebruiken om slim robotgedrag te bereiken."
Salam en haar collega's evalueerden het raamwerk dat ze ontwikkelden in een reeks experimenten en ontdekten dat het aanzienlijk beter presteerde dan offline methoden voor het berekenen van omgevingskenmerken. Het team demonstreerde specifiek de effectiviteit van het model dat ze ontwikkelden in twee scenario's waarin robots stedelijke omgevingen bewaakten en op het water navigeerden.
In de toekomst kan het door dit team van onderzoekers geïntroduceerde raamwerk uiteindelijk helpen om het vermogen van zowel bestaande als opkomende robots om door onbekende en dynamische omgevingen te navigeren, te verbeteren. Ondertussen is Salam van plan om het potentieel van het gebruik van omgevingsfuncties om robotnavigatie te verbeteren verder te onderzoeken.
"In mijn volgende studies zal ik doorgaan met het onderzoeken van technieken die mondiale dynamiek en machine learning in meer algemene kaders verbinden", voegde Salam eraan toe. "Ik zou bijvoorbeeld de globale dynamiek van willekeurige omgevingen willen weergeven op basis van sensormetingen die door robots zijn verzameld."
 Hoe de natuur waterstofproducerende enzymen bouwt
Hoe de natuur waterstofproducerende enzymen bouwt- Natuurkundige maakt ademhalingstoestellen van het type N95 met een suikerspinmachine
- Magnetische bacteriën als micropompen
- Een biosensor detecteert binnen een uur vervalsing van paard in rundvlees
- Interactie tussen nanoplastics en pectine, een in water oplosbaar polysacharide
- Kan de wereld op een betere plek uit de pandemie te voorschijn komen?
- Onmogelijk om aan te passen:Verrassend snel smelten van ijs in het verleden verhoogt de angst voor zeespiegelstijging
- Welke insecten leggen eieren?
- Het vermijden van plastic voor eenmalig gebruik werd normaal tot het coronavirus. Hier is hoe we kunnen terugkeren naar goede gewoonten
- Onderzoekers stellen een raamwerk voor voor het evalueren van de effecten van klimaatverandering op de water- en energiesystemen van Californië
Hoofdlijnen
- Hoe C. elegans-wormen voorkomen dat ze vergiftigd raken
- Kunnen planten denken?
- Onderzoekswetenschappers ontdekken nieuwe productieroute voor SOS-signalen van planten
- Hoe komen de spermacellen in een stuifmeelkorrel aan bij de eicelklus in een plant-ovule?
- Hoeveel calorieën verbrand ik als ik lach?
- Welke conclusies kunnen worden getrokken uit de overeenkomsten van de genetische code tussen levende organismen?
Als je door het park loopt en een straathond door het gras ziet rennen, is het niet zo moeilijk om delen van het erfgoed te identificer
- Hoe libellen zichzelf oprichten als ze ondersteboven worden neergezet
- De koala:wanneer het slim is om langzaam te zijn
- Wat zijn de zes belangrijkste elementen in levende organismen?
- Drie scenario's laten zien dat we goed moeten nadenken over ethiek bij het ontwerpen van slimme steden

- Hoe Amerikaanse videogamebedrijven tools bouwen voor de bewakingsstaat van China

- Wearables zetten een logische stap richting controle aan boord
- Microsoft-aandeelhouders verwerpen 2 activistische voorstellen

- Medewerkers van Big Tech spreken zich uit als nooit tevoren


 Beter, krachtiger afdrukken met nanostructuren van silicium
Beter, krachtiger afdrukken met nanostructuren van silicium- Grace verzwakt tot tropische storm na geselen Mexicaanse Caraïben
- Kankerverwekkend stof dat vrijkomt bij grondwerken
- Afbeelding:Proba-V geeft de fakkel door
- Kepler begint 18e waarnemingscampagne met focus op sterrenhopen
- Hoge GPA zou kunnen werken tegen jonge vrouwelijke werkzoekenden
- Het aanbrengen van steenstof op akkerlanden kan tot 2 miljard ton CO2 uit de atmosfeer opnemen
- Onderzoek naar superstil gemaakte DNA hints naar nieuwe manieren om cellen te herprogrammeren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
