Wetenschap
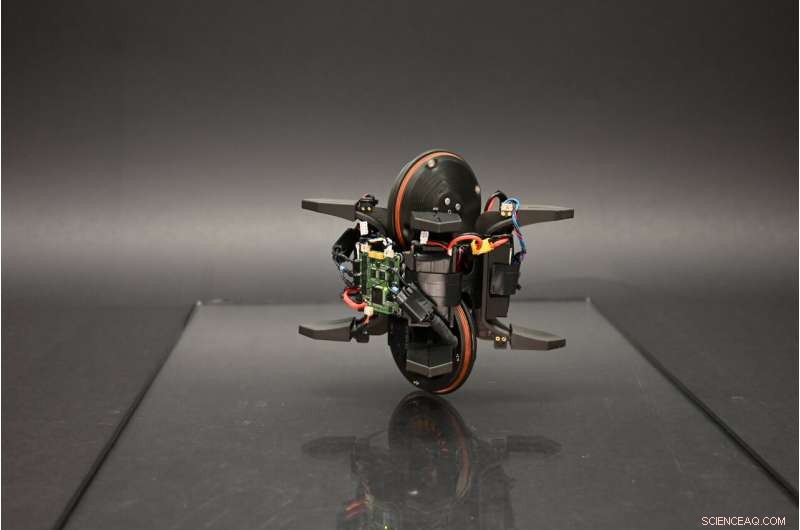
De Wheelbot:een symmetrische eenwieler met springende reactiewielen

Krediet:Geist et al.
Onderzoekers van de RWTH Aachen University in het team van prof. Sebastian Trimpe en het Max Planck Institute for Intelligent Systems (MPI-IS) Stuttgart hebben onlangs de Wheelbot ontwikkeld, een eenwieler met symmetrisch reactiewiel die autonoom vanuit elke uitgangspositie op zijn wielen kan springen. Deze unieke robot, geïntroduceerd in een paper gepubliceerd in de IEEE Robotics and Automation Letters werd vervaardigd met behulp van een combinatie van kant-en-klare en 3D-geprinte componenten.
"Onze onderzoeksgroep werkt op het snijvlak van data science en engineering. Een specifieke richting van ons onderzoek is gericht op het combineren van inzichten uit de regeltheorie met machine learning", zegt René Geist, lid van Trimpe's team in Aken en hoofdonderzoeker achter de Wheelbot, aan Tech Ontdekken. "Testbeds zoals slingers, robotarmen en quadcopters helpen ons om te controleren of de theoretische aannames die aan een algoritme ten grondslag liggen ook praktisch zijn. Idealiter zijn deze testbedden eenvoudig te gebruiken, terwijl ze moeilijk te besturen zijn met de modernste algoritmen , waardoor we buiten de kaders moeten denken."
Twee andere voorbeelden van dergelijke testbeds zijn de zogenaamde "Balancing Cube" en zijn afstammeling de "Cubli". Deze twee systemen hebben vaak geholpen bij het evalueren van de effectiviteit van netwerkbesturingssystemen en gegevensgestuurde methoden voor het bereiken van niet-lineaire besturing.
Het recente werk van Trimpe, Geist en hun collega's bouwt voort op deze eerdere inspanningen in het veld. Hun doel was om een minimalistische eenwielerrobot te ontwikkelen die als testbed kan worden gebruikt door robotici en computerwetenschappers over de hele wereld. Om dit te doen, hebben Trimpe en zijn onderzoeksgroep aan de RWTH Aachen University de krachten gebundeld met Jonathan Fiene, hoofd van het ZWE Robotics-laboratorium bij de MPI-IS.
"Al vroeg in het project kozen we voor het gebruik van borstelloze motoren, omdat de ZWE-robotica veel ervaring heeft met het gebruik hiervan in het open dynamische robotinitiatief, terwijl de prijzen voor lichtgewicht borstelloze motoren daalden vanwege de wijdverbreide aanpassing van quadcopters in de consument markt", legt Geist uit. "Als je naar een motor kijkt, is misschien wel de eenvoudigste actuator die je kunt bedenken om er een wiel aan te bevestigen. Als zo'n wiel de grond raakt, noemen we het een 'rollend wiel', als dat niet het geval is, verwijzen we naar het als een 'reactiewiel'."
Om een niet-vliegende robot met één lichaam in evenwicht te brengen met het vermogen om te rijden en manoeuvres uit te voeren, zijn over het algemeen minimaal twee wielen nodig. Dit kunnen ofwel rollende wielen zijn, wat resulteert in een Segway-achtige robot of een enkel rollend wiel en een reactiewiel, wat resulteert in wat bekend staat als een "reactiewiel" - of "momentuitwisseling" - eenwielerrobot.
Eenwielerrobots met geïntegreerde reactiewielen hebben een zeer eenvoudig ontwerp en kunnen gemakkelijk worden geassembleerd door zowel deskundige robotici als studenten. Ondanks hun eenvoud zijn eenwielers met een reactiewiel vrij moeilijk te besturen. Dit maakt ze bijzonder gunstige proeftuinen voor onderzoek naar robotnetwerken en op leren gebaseerde besturingsmethoden.
"Eerder voorgestelde eenwielerrobots zijn ontworpen om alleen nauw rond hun rechtopstaande evenwichtspositie te balanceren, wat aanzienlijk beperkt wat je met deze systemen kunt doen," zei Geist. "Om het nut van een eenwielerrobot met reactiewiel te maximaliseren, hebben we besloten dat de Wheelbot moet kunnen herstellen van vrij grote storingen, een voeding aan boord moet hebben om te voorkomen dat kabels de manoeuvreerbaarheid beperken, en bovendien in staat moet zijn om zichzelf weer op te richten na omvallen."
Net als de wielen van eenwielers heeft de Wheelbot een rollend wiel dat voorkomt dat hij omvalt terwijl hij in de lengterichting beweegt. In tegenstelling tot eenwielers integreert de robot echter ook een reactiewiel dat voorkomt dat hij zijdelings omvalt.
"Om de innerlijke werking van een reactiewiel te begrijpen, kun je thuis een eenvoudig experiment doen", zei Geist. "Alles wat je nodig hebt is een draaistoel en een middelzwaar voorwerp, zoals een kat. Ga met je knieën op de stoel zitten en strek je armen terwijl je de kat vasthoudt, en draai dan je bovenlichaam met de klok mee. Terwijl de kat bezwijkt voor zijn lot, je zult merken dat je knieën tegen de klok in draaien. In deze analogie duidt je bovenlichaam de rotor van de motor aan, terwijl je onderlichaam de stator van de motor aangeeft."
In wezen, in reactiewielen, wanneer de rotor van een motor (bevestigd aan het wiel) met de klok mee draait, zal de stator van de motor (bevestigd aan de rest van de Wheelbot) tegen de klok in draaien. Robots die balanceren met behulp van een reactiewiel verschillen van robots die hun toevlucht nemen tot gyroscopen om te balanceren. In een gyroscoop wordt een snel draaiend wiel orthogonaal geroteerd ten opzichte van zijn draairichting, waardoor balancerende koppels ontstaan als gevolg van behoud van impulsmoment.
In een reactiewiel treden deze effecten ook op, maar zijn minuscuul vergeleken met de reactiemomenten. Reactiekoppels worden direct in het wiel gecreëerd en wijzen parallel aan de draairichting van het wiel.
Krediet:Geist et al.
"Tijdens de zelfbouw moeten de reactiemomenten de Wheelbot 90 graden draaien", legt Geist uit. "Tijdens de manoeuvre trekt de motor van de Wheelbot 16 ampère bij 24 volt. Voor een 22 cm (8,7 inch) grote robot pakken de motoren behoorlijk wat kracht uit, waardoor we gedwongen werden een op maat ontworpen motorcontroller te gebruiken, zoals in de handel verkrijgbare motorcontrollers waren ofwel te groot of kon niet genoeg stroom aan bij de gegeven spanning."
Bij een stroomafname van 16 Ampere ontdekten de onderzoekers dat de motor die de Wheelbot in beweging zette in slechts 0,25 seconden zijn snelheidslimiet bereikte. Vanwege deze beperking en andere uitdagingen die doorgaans worden ondervonden bij het bouwen van eenwielers op basis van een reactiewiel, besloten Geist en zijn collega's om een geheel nieuw ontwerp voor hun robot te bedenken.
"Eerst hebben we besloten dat de robot symmetrisch moet zijn, waardoor het aantal verschillende onderdelen dat moet worden geprint effectief wordt verminderd en de Wheelbot elk van zijn wielen als rollend wiel kan gebruiken", zei Geist. "Symmetrie heeft als bijkomend voordeel dat het bovenwiel aanzienlijk kleiner moet zijn in vergelijking met bestaande eenwielerrobots, waardoor de rotatietraagheid in de gierrichting wordt verminderd. Ten tweede hebben we de afmetingen van de robot zo ontworpen dat het vereiste koppel voor zelfoprichten tot een minimum wordt beperkt."
In eerste tests ontdekten de onderzoekers dat de standaardversie van hun robot in twee stappen vanuit elke beginpositie op zijn wielen kon springen. Hierdoor kan de robot zijn reactiewiel vertragen voordat hij de tweede en laatste stap voltooit (d.w.z. zichzelf weer omhoog duwen). '
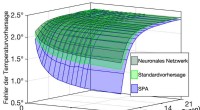
Naast het maken van een prototype van hun robot, hebben Geist en zijn collega's ook een aangepaste staatsschatter gemaakt, een algoritme dat de rol- en hellingshoeken van de robot kan schatten. Dit systeem ontleent zijn schattingen aan metingen van de vier traagheidsmeeteenheden (IMU's) en wiel-encoders van de robot, die alleen zijn gebaseerd op eerdere en beschikbare kennis over het zogenaamde kinematische model van de robot (d.w.z. een wiskundige beschrijving van de positie van de Zwaartepunt).
"We denken dat in het geval van robots op wielen (inclusief Ballbots), de voorgestelde schatter een interessant alternatief vormt voor andere schattingsalgoritmen zoals Kalman-filtering," zei Geist. "De Wheelbot laat zien dat een beknopte keuze van de afmetingen en hardware van een eenwielerrobot met reactiewiel een veelzijdig testbed oplevert voor robotbesturing."

Krediet:Geist et al.
Geist en zijn collega's waren de eersten die een eenwielerrobot maakten die vanuit elke uitgangspositie efficiënt op zijn wielen kan springen. Hun paper is dus een belangrijke bijdrage aan het gebied van robotica, omdat het de elektronische en mechanische uitdagingen oplost die doorgaans worden ondervonden bij het maken van dit nieuwe type eenwielers op basis van een reactiewiel.
"Behalve dat het een uitdagend testbed is voor robotbesturing, zien we een groot potentieel voor de Wheelbot als een educatief platform dat studenten kennis laat maken met robotica," zei Geist. "In dit opzicht is de Wheelbot een typisch voorbeeld voor het demonstreren van de interdisciplinaire aard van robotica. Naast het mechanische ontwerp dat het modelleren en simuleren van de behoorlijk interessante dynamiek van de robot vereist, vormt de hoge stroomafname van zijn motoren aanzienlijke uitdagingen voor het elektronische ontwerp."
In de toekomst kan de Wheelbot worden gebruikt in zowel onderwijs- als onderzoeksomgevingen om robotbesturingsnetwerken, algoritmen voor machine learning en andere modellen te testen. Een belangrijk voordeel van de robot is dat de werking ervan slechts een basiskennis van software-engineering vereist, waardoor het een ideaal experimenteel platform is voor studenten en ingenieurs die hun eerste stappen in robotica zetten.
Onderzoekers in Trimpe's team werken nu aan een nieuwe versie van hun robot, genaamd Wheelbot v3. Een kerndoel is om de robot nog toegankelijker te maken, zodat het gemakkelijker is om te bouwen, te gebruiken en ermee te experimenteren.
"De volgende versie van de Wheelbot zal een beetje kleiner zijn dan de huidige versie, maakt gebruik van een krachtigere microcontroller en is qua firmware-ontwerp gemakkelijker te bedienen", voegde Geist eraan toe. "Bovendien werken we momenteel aan een besturingsalgoritme dat de Wheelbot langs een vooraf gedefinieerd pad stuurt. Na het bouwen van de eerste eenwielerrobot met springend reactiewiel, zijn we verheugd om aan te tonen dat de Wheelbot ook in staat is om behendige rijmanoeuvres uit te voeren." + Verder verkennen
Een auto op wielen, viervoeter en mensachtige robot:Swiss-Mile Robot van ETH Zürich
© 2022 Science X Network
 Verschil tussen lineaire en vertakte polymeren
Verschil tussen lineaire en vertakte polymeren- Chemici ontwikkelen recordbrekend poreus kristallijn materiaal met 's werelds grootste oppervlakte
- Wat zijn de drie belangrijkste typen microscopen?
- Onderzoekers ontdekken moleculaire mechanismen van oude kruidengeneesmiddelen
- Hoe te weten of een stof een reductiemiddel of een oxidatiemiddel is door het periodiek systeem?
Hoofdlijnen
- De chemische samenstelling van voedingsstoffen Agar
- Prolifereren of niet prolifereren? Een cellulaire lente antwoordt
- Vetzuur: definitie, metabolisme en functie
- Waarom worden we ziek?
- Vissers in Istanbul houden traditie in stand ondanks voorraadalarm
- Boven- en ondergrondse eigenschappen variëren in reactie op de beschikbaarheid van bodemvocht en plantconcurrentie
- Zelfverdediging voor planten
- Microbiële bewoner stelt kevers in staat zich te voeden met een bladdieet
- Projectideeën om het menselijke spijsverteringsstelsel te laten zien op de middelbare school voor studenten
- Wat is een blockchain-token?

- Facebook en COVID-19:ze hebben de app verwijderd, toen kwam het coronavirus

- De werkplek delen met robots? Nieuwe tool helpt ontwerpers om veiligere machines te maken

- Negen jaar later, staat van de sanering in de kerncentrale van Fukushima

- Computergebaseerde weersvoorspelling:nieuw algoritme presteert beter dan mainframecomputersystemen

 Wat is de functie van een Tris-buffer in DNA-extractie?
Wat is de functie van een Tris-buffer in DNA-extractie? - Wetenschappers zeggen dat monsterpinguïn ooit in de oceanen van Nieuw-Zeeland zwom
- Onderzoekers ontdekken anti-laser vermomd als perfecte absorber
- Grafeeninkt gemaakt voor inkjetprinten van elektronische componenten
- Waarom wordt mijn arm groen met koperen armband?
- Nanotechnologie aandrijven met 's werelds kleinste motor
- Borax en antivries
- Kan een enkele vulkaanuitbarsting al het leven op aarde vernietigen?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
