Wetenschap
Open-source software geeft robotonderzoek een voorsprong
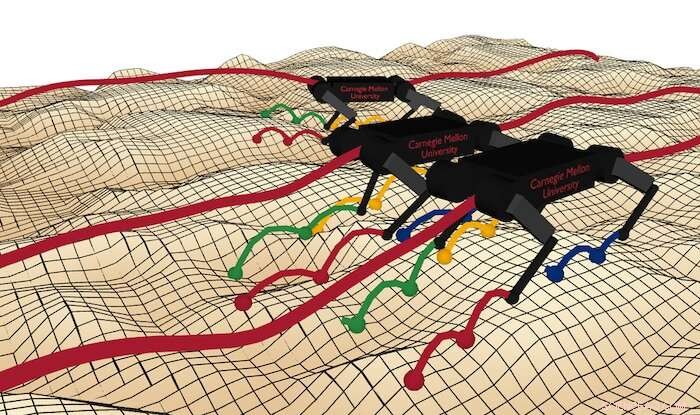
Quad-SDK is een open-source, full-stack framework voor behendige quadrupedale voortbeweging. Credit:Robomechanica Lab, Carnegie Mellon University
Carnegie Mellon-onderzoekers hebben open-sourcesoftware ontwikkeld die meer behendige bewegingen mogelijk maakt in beenrobots.
Robots kunnen mensen helpen met taken zoals hulp bij rampenherstel of het bewaken van de omgeving. In het geval van viervoeters, robots die op vier poten lopen, vereist hun mobiliteit veel softwarecomponenten om naadloos samen te werken. De meeste onderzoekers moeten veel van hun tijd besteden aan het ontwikkelen van infrastructuur op een lager niveau in plaats van zich te concentreren op gedrag op hoog niveau.
Het team van Aaron Johnson in het Robomechanics Lab van Carnegie Mellon University's College of Engineering heeft deze frustraties uit de eerste hand ervaren. De onderzoekers waren voor hun werk vaak aangewezen op eenvoudige modellen omdat bestaande softwareoplossingen niet open source waren, geen modulair raamwerk boden en end-to-end functionaliteit ontbeerden.
In een voorbeeld van innovatie geboren uit noodzaak, ontwierpen Johnson, een universitair hoofddocent werktuigbouwkunde, en zijn team hun eigen locomotiesoftwarestack, Quad-SDK, een full-stack framework voor agile quadrupedal locomotie.
Het ontwerp kan het ontwikkelproces voor robotici overal vereenvoudigen, omdat het een open source licentie gebruikt, wat betekent dat de software naar wens van de gebruiker kan worden gebruikt en aangepast. Quad-SDK wordt gebruiksklaar geleverd, dus onderzoekers hoeven zich geen zorgen te maken over de implementatie van de tools en infrastructuur; in plaats daarvan kunnen ze direct aan de slag met gedrag en toepassingen.
In tegenstelling tot andere opties is Quad-SDK ook compatibel met het Robot Operating System (ROS). ROS is een middleware, ergens tussen hardware en software, die verschillende delen van een systeem met elkaar laat praten. Als een robot bijvoorbeeld een obstakel op zijn pad waarneemt en informatie van zijn waarnemingsmodule naar zijn besluitvormingsmodule moet overbrengen, maakt ROS die communicatie mogelijk. Stel je een app voor die geen iOS of Android gebruikt - het is veel eenvoudiger als alles samenwerkt.
Locomotie is een gelaagd probleem, aangezien teamlid en Ph.D. student Ardalan Tajbakhsh beschrijft het:"Om iets zinvols te doen op een robot, moet je veel componenten naadloos laten samenwerken." Quad-SDK biedt een raamwerk voor robotica-onderzoekers en -ontwikkelaars om hun inspanningen te concentreren op de kernalgoritmen in plaats van op de softwaretooling en -infrastructuur.
Andere softwarepakketten zijn erg goed in het oplossen van één component, zoals motion planning, maar het is van cruciaal belang om end-to-end frameworks te hebben die de nodige algoritmen, tools en infrastructuur bieden voor het uitvoeren van hoogwaardig robotica-onderzoek.
Quad-SDK is full-stack, wat betekent dat het elk niveau van de hiërarchie bevat dat van invloed is op de voortbeweging van viervoeters, te beginnen met globale planning. Een laag bevindt zich bovenaan de stapel; Tajbakhsh vergelijkt het met Google Maps, omdat het kiest waar de robot ongeveer heen moet om zijn bestemming te bereiken. De volgende laag, de lokale planner, bepaalt de details van de route, zoals waar de robot zijn voeten moet plaatsen. Dit culmineert in een derde laag, de robotbestuurder, die commando's naar de gewrichten van de viervoeter stuurt om de gewenste beweging uit te voeren.
In de weken sinds Quad-SDK een Best Paper Award won tijdens de Workshop on Legged Robots op de IEEE International Conference on Robotics and Automation (ICRA) in 2022, hebben mensen gevraagd om het te gebruiken, een indicator van hoe nuttig de oplossingen zijn en hoe het open-sourceformaat nodigt uit tot samenwerking binnen de robotica-gemeenschap. + Verder verkennen
Onderzoekers ontwikkelen algoritme om taken te verdelen voor mens-robotteams
 Flexibele kwantumzeef filtert de brandstof van ruimteschip Enterprise
Flexibele kwantumzeef filtert de brandstof van ruimteschip Enterprise- Dubbel temperatuurregelsysteem om de biosynthese van isopreen in bakkersgist te reguleren
- Chemici gebruiken gemodificeerde DNA-nucleotiden om nieuwe materialen te maken
- Onderzoekers ontwikkelen nieuwe methode voor levering van glucagon
- Welke isotoop wordt gebruikt om de schildklier te bestuderen?
- Dam in Ethiopië veroorzaakt watertekort in Kenia:rechtengroep
- Natuurbrand bestrijden met GPS-gegevens
- Nederlanders bouwen kunstmatige eilanden om dieren in het wild terug te brengen
- De regenwouddieren die metamorfose ondergaan
Het regenwoud beslaat slechts 6 procent van 's werelds tropische gebieden, maar ze zijn de thuisbasis van meer dan de helft van de soorten dieren in de wereld. Sommige van deze dieren ondergaan een metam
- VN zegt dat de wereld stikt in plastic terwijl de milieucrisis groeit
Hoofdlijnen
- Hoe zijn cellen, weefsels en organen verwant?
- Welke organellen zijn membraansusjes die worden gebruikt om moleculen te transporteren?
- Soorten zenuwen in het menselijk lichaam
- Studie biedt een krachtige computermodelleringsbenadering voor celsimulaties
- Is er verteld dat je te gevoelig bent? Je zou een empaat kunnen zijn
- Kunnen we langer leven? Natuurkundige doet ontdekking over telomeren
- Chloroplast & Mitochondria: wat zijn de overeenkomsten en verschillen?
- Wat zijn de voor- en nadelen van endotherm zijn?
- Hoe een 3D-model van een plantencel te maken
- BP kijkt naar ORNL, ADIOS om gegevens in toom te houden

- Big data omzetten in realtime, bruikbare intelligentie
- Kunnen schoolauto's vissen hoe samen te rijden?

- Lyft biedt elektrische voertuigopties voor rijders, chauffeurs

- Facebook verbiedt door het buitenland gefinancierde advertenties voor verkiezingen in Indonesië


 Pennsylvania laat zelfrijdende auto's van Uber weer de weg op
Pennsylvania laat zelfrijdende auto's van Uber weer de weg op- Milieuvriendelijke hut in Australië vindt inspiratie in A-frame tent
- Wat is een witte teek?
Een teek is een klein spinachtig wezen dat bijt en hecht aan de huid van een dier of een mens. Eenmaal bevestigd, zal het vinkje zich voeden met het bloed van de gastheer totdat dat deel van zijn levenscyclus is geëindigd of
- Satellieten laten gletsjers van de wereld zien die sneller dan ooit smelten
- Facebook zegt wijzigingen in politieke advertenties uit te breiden naar het VK
- Onderzoekers ontdekken dat sommige cidermakers onnodige suiker toevoegen
- Hoe converteer je Hertz naar Milliseconds
- Het beroemde Zelinsky-proces onthuld:zelfbevorderende acetylenische cascade produceert benzeen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
