Wetenschap
Robots leren teamspelers te zijn met de natuur
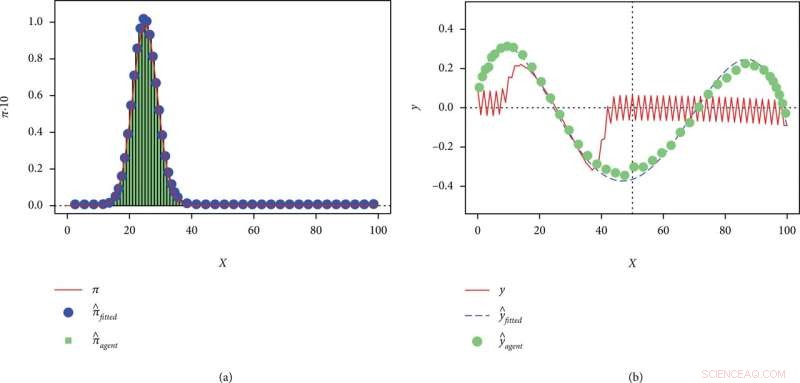
Resultaten voor het unimodale scenario. Illustratie van de ontwerpmethode en vergelijking met multiagent-simulaties voor het unimodale scenario:(a) geeft de stationaire verdeling weer en (b) de verwachte verandering. Krediet:Intelligent Computing (2022). DOI:10.34133/2022/9761694
Algen bloeien, vogels komen samen en insecten zwermen. Dit massaal gedrag van individuele organismen kan afzonderlijk en collectief goed zijn, zoals het verbeteren van de kansen op succesvolle voortplanting van de paring of het bieden van veiligheid. Nu hebben onderzoekers de zelforganisatievaardigheden aangewend die nodig zijn om de voordelen van natuurlijke zwermen te plukken voor robottoepassingen in kunstmatige intelligentie, computergebruik, zoeken en redden, en nog veel meer.
Ze publiceerden hun methode op 3 augustus in Intelligent Computing .
"Het ontwerpen van een reeks regels die, eenmaal uitgevoerd door een zwerm robots, resulteren in een specifiek gewenst gedrag, is bijzonder uitdagend", zegt corresponderend auteur Marco Dorigo, professor in het kunstmatige-intelligentielaboratorium, genaamd IRIDIA, van de Université Libre de Bruxelles, België. "Het gedrag van de zwerm is geen één-op-één kaart met eenvoudige regels die worden uitgevoerd door individuele robots, maar is eerder het resultaat van de complexe interacties van veel robots die dezelfde reeks regels uitvoeren."
Met andere woorden, de robots moeten samenwerken om het somdoel van discrete bijdragen te bereiken. Het probleem, volgens Dorigo en zijn co-auteurs Dr. Valentini en Prof. Hamann, is dat conventioneel ontwerp voor individuele eenheden om een collectief doel te bereiken bottom-up is, en dat er verfijningen met vallen en opstaan nodig zijn die kostbaar kunnen zijn.
"Om deze uitdaging aan te gaan, stellen we een nieuwe global-to-local ontwerpbenadering voor," zei Dorigo. "Ons belangrijkste idee is om een heterogene zwerm samen te stellen met behulp van groepen van gedrags verschillende agenten, zodat het resulterende zwermgedrag een gebruikersinvoer benadert die het gedrag van de hele zwerm vertegenwoordigt."
Deze samenstelling omvat het selecteren van individuele agenten met vooraf bepaald gedrag waarvan de onderzoekers weten dat ze zullen samenwerken om het beoogde collectieve gedrag te bereiken. Ze verliezen de mogelijkheid om individuele eenheden lokaal te programmeren, maar volgens Valentini, Hamann en Dorigo is de afweging de moeite waard. Ze wezen op het voorbeeld van een bewakingstaak, waarbij een zwerm mogelijk een faciliteit moet bewaken die overdag meer interne bewaking en 's nachts meer externe bewaking vereist.
"De gebruiker geeft een beschrijving van de gewenste zwermtoewijzingen als een kansverdeling over de ruimte van alle mogelijke zwermtoewijzingen - meer agenten overdag binnen, 's nachts meer buiten of vice versa," zei Valentini.
De gebruiker zou het doelgedrag definiëren door het aantal en de positie van de distributiemodi te wijzigen, waarbij elke modus een specifieke toewijzing correspondeert, zoals 80% van de agenten binnen, 20% buiten overdag en 30% binnen, 70% buiten 's nachts. Hierdoor kan de zwerm gedrag periodiek en autonoom veranderen, vooraf bepaald door de ingestelde modi, als de omstandigheden veranderen.
"Hoewel het moeilijk is om de exacte besturingsregels voor robots te vinden, zodat de zwerm zich gedraagt zoals we willen, kan een gewenst zwermgedrag worden verkregen door verschillende sets besturingsregels te combineren die we al begrijpen," zei Dorigo. "Zwermgedrag kan macroscopisch worden ontworpen door robots van verschillende vooraf gedefinieerde regelsets te mengen."
Dit is niet de eerste keer dat Dorigo zich tot de natuur wendt om de computerwetenschappelijke benaderingen te verbeteren. Hij ontwikkelde eerder het mierenkolonie-optimalisatie-algoritme, gebaseerd op hoe mieren navigeren tussen hun kolonies en voedselbronnen, om moeilijke computerproblemen op te lossen waarbij een goede benadering van een optimaal pad in een grafiek moet worden gevonden.
Hoewel Dorigo deze aanpak voor het eerst voorstelde voor een relatief eenvoudig probleem, is het sindsdien geëvolueerd als een middel om een verscheidenheid aan problemen aan te pakken. Dorigo zei dat hij van plan is om de zwermmethodologie in een vergelijkbare richting te nemen.
"Onze onmiddellijke volgende stap is om de validiteit van onze methodologie aan te tonen voor een grotere reeks zwermgedragingen en verder te gaan dan taaktoewijzing," zei Dorigo. "Ons uiteindelijke doel is om te begrijpen wat dit mogelijk maakt, door een generieke theorie te formaliseren waarmee onderzoekers en ingenieurs zwermgedrag kunnen ontwerpen zonder het moeizame proces van vallen en opstaan." + Verder verkennen
Minder communicatie tussen robots stelt hen in staat betere beslissingen te nemen
 Waarom veranderen hydraten van kleur wanneer ze worden verwarmd?
Waarom veranderen hydraten van kleur wanneer ze worden verwarmd? - Hoe de concentratie te vinden wanneer u de pH
- Ontwikkeling van een nieuwe magneet die het gebruik van zeldzame aardmetalen met 30% vermindert
- Interstellaire ionen nabootsen met lasers
- Wanneer meer botvormende cellen gelijk zijn aan minder bot
- Bosbranden kunnen het drinkwater vervuilen. Dat baart sommigen zorgen in de heuvels boven Santa Cruz
- Een droogte-index voor verdampingstekorten om de gevolgen van droogte voor ecosystemen te detecteren
- Levens redden met schonere lucht
- Onkruidbedekking in olijfboomgaarden vergroot de capaciteit van ecosystemen als CO2-put
- Extreme hittegolven zetten meren en rivieren deze zomer in heet water
Hoofdlijnen
- Het bloedstamcelonderzoek dat de geneeskunde van de toekomst zou kunnen veranderen
- Zeedruiven, een gezonde delicatesse uit de oceaan
- Wetenschappers bestuderen toeristen om mensapen te beschermen
- Hebben vogelgezang en menselijke spraak biologische wortels?
- Zelfs koude harde contanten zijn niet genoeg stimulans om naar tegengestelde meningen te luisteren
- Nieuwe biologische sensor detecteert verborgen ziekte in aardappelen
- Het ontrafelen van de mechanismen die de celgroei en -grootte regelen
- Onderzoekers identificeren genen die zoogdieren van andere dieren onderscheiden
- Bewijs dat energiemetabolisme en regulatie van biofilmvorming in bacteriën met elkaar verweven zijn
- Geef het spel de schuld als wielen van de autosector in India komen

- Supersnel opladen van elektrische auto's, met een op maat gemaakte touch

- James Murdoch neemt belang in Vice Media:rapport

- Google steekt $ 25 miljoen op voor AI-onderzoek om de mensheid te helpen aarde

- Monitoring van menselijke fysiologische reacties om interacties met robots te verbeteren


 Nieuw leven inblazen in bestaande technologie:FT-IR-spectrometer toont moleculaire oriëntatie
Nieuw leven inblazen in bestaande technologie:FT-IR-spectrometer toont moleculaire oriëntatie- Een film van de microwereld:natuurkundigen maken fotoseries van nanodeeltjes
- Welke uitrusting te nemen op een Gem Mijnbouw Trip
- Nieuwe studie suggereert dat de oorspronkelijke locatie van het Tapijt van Bayeux eindelijk is opgelost
- Oude DNA-resultaten eindigen 4, 000 jaar oud Egyptisch mummiemysterie
- Sentinel-2 brengt aardbeving in Indonesië in kaart
- Canada gebruikt genealogische sites om gedeporteerden te identificeren
- Testtijd voor MetOp Tweede Generatie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
