Wetenschap
Monitoring van menselijke fysiologische reacties om interacties met robots te verbeteren
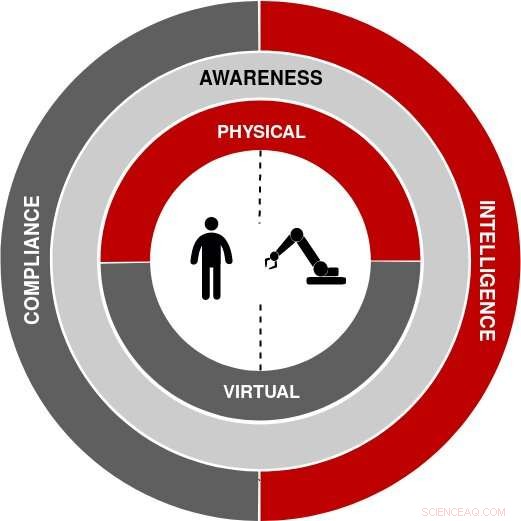
Een systeemdiagram voor het conceptuele raamwerk voor een menselijke robotsamenwerking als systeem van systemen dat de 3 aspecten van een HRC-systeem benadrukt:bewustzijn, Intelligentie en naleving. Krediet:Savur, Kumar &Sahin.
Onderzoekers van het Century Mold Collaborative Robotics Laboratory (CMCRL) van het Rochester Institute of Technology (RIT) in New York hebben onlangs een nieuw raamwerk ontwikkeld voor het monitoren van menselijke fysiologische reacties terwijl gebruikers samenwerken met een robot om een taak te voltooien. Onder supervisie van Prof. Ferat Sahin, directeur van het Multi Agent Bio-Robotics Laboratory, CMCRL-onderzoekers werken aan de ontwikkeling van systemen, frameworks en softwaretools om de samenwerking tussen mens en robot in een industriële omgeving te bestuderen. Hun nieuwe aanpak, geschetst in een paper dat vooraf is gepubliceerd op arXiv en zal worden gepresenteerd op de IEEE Systems, Man &Cybernetics-conferentie in Bari (Italië), maakt het continu verzamelen van fysiologische gegevens mogelijk tijdens mens-robot-interacties, terwijl de bewegingen van een robot worden veranderd om een reactie op te wekken bij de mens met wie hij interactie heeft.
Veel deskundigen zijn van mening dat binnenkort, mens en machine gaan samenwerken op verschillende terreinen, inclusief industrie en productie. Om efficiënte automatisering en samenwerking tussen mens en robot mogelijk te maken, echter, onderzoekers zullen benaderingen moeten ontwikkelen die gebruik maken van menselijke vaardigheden, zoals besluitvorming, behendigheid, flexibiliteit en creativiteit, deze combineren met de snelheid, nauwkeurigheid en kracht geassocieerd met robots.
In feite, terwijl volledige automatisering erg duur zou zijn, productie die alleen door mensen handmatig wordt uitgevoerd, is vaak traag en vatbaar voor fouten. Het is daarom belangrijk om tools te ontwikkelen die de samenwerking tussen mens en robot verbeteren. Volgens RIA, dit zal een centraal onderdeel zijn van de Vijfde Industriële Revolutie, ook bekend als Industrie 5.0.
"Naar onze mening zijn er drie belangrijke uitdagingen voor de samenwerking tussen mens en robot in de industrie:veiligheid, menselijk vertrouwen in automatisering en productiviteit, "Shitij Kumar, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Deze zijn allemaal van elkaar afhankelijk. Om deze uitdagingen aan te gaan, we hebben eerst een mens-robot-samenwerkingsopstelling (HRC) ontwikkeld als een systeem van systemen waarmee we verschillende mens-robot-samenwerkingsscenario's kunnen creëren en mens-robot-interacties kunnen begrijpen en analyseren."
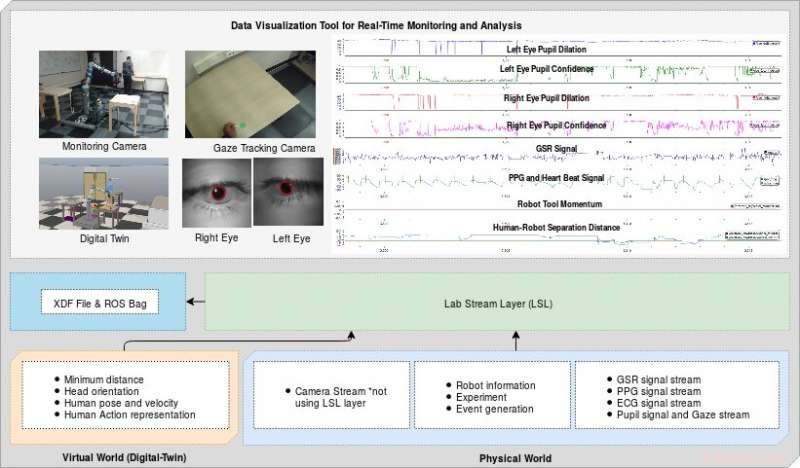
Een systeemdiagram van de implementatie op basis van het voorgestelde raamwerk dat de gegevensverzameling en -monitoring tijdens een HRC-experiment weergeeft. Krediet:Savur, Kumar &Sahin.
Als onderdeel van zijn Ph.D., onder leiding van Dr. Ferat Sahin, de directeur van CMCRL, Kumar begon met het ontwikkelen van een systeem dat het robotgedrag verandert op basis van de afstand tussen mens en robot en acties in de gedeelde werkruimte. In deze context, het gedrag van een robot is deterministisch en voorspelbaar op basis van regels.
Ondanks de belofte van zijn aanpak, hij ontdekte dat menselijke feedback niet altijd plaatsvond, waardoor het voor zijn systeem moeilijker werd om bevredigende robotconformiteit te bereiken. Robotcompliance betekent in wezen dat de robot de verwachtingen van de mensen waarmee hij communiceert, kan managen en effectief met hen kan communiceren.
"We waren van mening dat een betere naleving van het systeem dat de operator die met de robot werkt een gevoel van controle en voorspelbaarheid van het robotgedrag geeft, zijn/haar vertrouwen in automatisering zou vergroten, " en daarmee de productiviteit van de taak te verhogen, " zei Kumar. "Echter, toen begonnen we ons af te vragen, hoe kwantificeer je het 'vertrouwen' of het comfortniveau van een menselijke operator die met de robot werkt?"
Kumar en zijn collega's geloven dat het monitoren van menselijke fysiologische signalen, die indicatoren zijn van mentale en fysieke stress, evenals andere emoties, tijdens een taak waarbij mens-robot-interactie betrokken is, zou een stap in de goede richting zijn. Deze overtuiging wordt ondersteund door eerder onderzoek waaruit bleek dat dergelijke signalen (bekend als psychofysiologische reacties) betrouwbare indicatoren zijn voor het veranderen van robotgedrag en -beweging.

Sensoren en apparaten gebruikt in de prototype-implementatie. De onderzoekers gebruikten een motion capture-systeem om menselijke bewegingen te volgen en een camera om het experiment vast te leggen. Ze volgden ook menselijke blik met behulp van Pupil Labs en menselijke fysiologische reacties zoals pupilverwijding, PPG, GSR, EEG \&ECG opgenomen. Krediet:Savur, Kumar &Sahin.
Met dit in gedachten, Celal Savur, een doctoraat Student aan RIT's CMCRL, voerde een onderzoek uit om de effecten van de beweging en het gedrag van robots op menselijke psychofysiologische reacties te onderzoeken. Het belangrijkste doel van zijn onderzoek was om te begrijpen welke veranderingen in de beweging van een robot resulteren in 'menselijk ongemak'-reacties zoals angst of stress.
"Om dit te doen, er was behoefte aan een raamwerk voor een systeem dat de robotbeweging en de menselijke fysiologische toestand tegelijkertijd vertegenwoordigt en registreert, " legde Savur uit. "Zodra de relatie tussen de robotbeweging en de menselijke fysiologische toestand is geïdentificeerd, de menselijke fysiologische reactie kan worden gebruikt als feedback om de beweging/het gedrag van de robot direct te controleren/bij te werken. Dergelijke systemen worden 'fysiologische computersystemen' genoemd. waarin de games zich realtime aanpassen aan de reacties van de gamer, om een meer interactieve game-ervaring te bereiken."
In hun studie hebben Savur en Kumar wilden een raamwerk ontwikkelen dat menselijke psychofysiologische reacties kan volgen terwijl gebruikers taken uitvoeren waarbij samenwerking tussen mens en robot betrokken is. Hun werk ligt op het snijvlak van informatica, robotica en psychofysiologie, een tak van neurowetenschap die probeert te begrijpen hoe iemands mentale toestand en zijn/haar fysiologische reacties op elkaar inwerken of elkaar beïnvloeden.
Het raamwerk dat ze ontwikkelden valt onder de categorie 'fysiologisch computergebruik'. Dit is een soort affectief computergebruik dat realtime softwareaanpassing aan de psychofysiologische activiteit van de gebruiker omvat. het door hen voorgestelde raamwerk kan worden gebruikt om te onderzoeken hoe veranderingen in de robotbeweging (bijvoorbeeld snelheid en traject) de menselijke operator in een industriële omgeving beïnvloeden.
"Laten we overwegen, bijvoorbeeld, dat er twee operators met een robot werken, exploitant A en B, " legde Kumar uit. "Operator A heeft langer gewerkt en voelt zich comfortabel bij het werken met de robot, omdat hij/zij het robotgedrag uit ervaring kan voorspellen. Operator B is nieuw en staat een beetje sceptisch tegenover de robotbeweging. Het gedrag van de robot verandert in termen van snelheid waarmee hij beweegt en hoeveel afstand hij aanhoudt wanneer hij in de buurt van de operator is op basis van de fysiologische toestand en gedragspatronen van de operator. In dit scenario, voor een betere mens-robot interactie, de robot kan met hogere snelheden bewegen in de buurt van operator A, en beweeg langzaam terwijl u met machinist B werkt. Naarmate machinist B meer ervaring opdoet, de robotbeweging kan zich eraan aanpassen, waardoor vertrouwen wordt opgebouwd en de algehele productiviteit positief wordt beïnvloed."
Het onderzoek van de onderzoekers in CMCRL had twee hoofddoelen. De eerste was het genereren van een database van samenwerkingstaken tussen mens en robot, het opnemen van mens-robot interacties. Vervolgens wilden ze deze database gebruiken om te onderzoeken hoe menselijke fysiologische reacties kunnen worden gebruikt om de beweging van een robot te beïnvloeden. een positief effect hebben op het automatiseringsproces. Met andere woorden, hun doel was om een fysiologisch computersysteem te bouwen voor samenwerking tussen mens en robot in industriële en productieomgevingen.
"Ons raamwerk is in wezen een systeem dat de beweging van de robot en de menselijke fysiologische toestand tegelijkertijd vertegenwoordigt en registreert, " zei Kumar. "Om deze informatie vast te leggen, het raamwerk biedt interfaces voor de robot, sensoren zoals camera's, motion capture-systeem en ook voor de biologische/biometrische data-acquisitie-apparaten. Aangezien al deze apparaten op verschillende bemonsteringsfrequenties werken, dit raamwerk helpt bij synchrone data-acquisitie en representatie van de samenwerking tussen mens en robot."
In traditionele sociale robotica experimentele opstellingen, proefpersonen worden tijdens of na een experiment gevraagd naar hun ervaringen en percepties. Met behulp van hun feedback, onderzoekers zijn dan in staat om de tijdens het experiment verzamelde subjectieve gegevens te analyseren en te kwantificeren.
"Methoden die proefpersonen onderbreken of de proefpersoon hun ervaring laten herinneren, echter, zijn niet altijd in staat om de integriteit van het experiment te behouden of de subjectieve gegevens nauwkeurig weer te geven, " legde Kumar uit. "Daarom, in tegenstelling tot traditionele methoden, deze implementatie van het raamwerk stelt de mens of de hoofdonderzoeker in staat om gebeurtenismarkeringen te genereren terwijl het experiment / de taak van de menselijke robotsamenwerking (HRC) wordt uitgevoerd."
Hun raamwerk kan automatisch gebeurtenismarkeringen genereren op basis van de mens-robotrepresentatie in een virtuele wereld, die bekend staat als een digitale tweeling. Bijvoorbeeld, het kan helpen om te bepalen wanneer de robot en de mens het dichtst bij elkaar waren tijdens de taak, wanneer de robot moest stoppen of werd onderbroken door een menselijke handeling, de voortgang van de taak die door de mens wordt uitgevoerd, gebeurtenissen op basis van commando's of controle door de menselijke operator, een gebeurtenis waarbij de robot op maximale snelheid werkte, en het begin/einde van een taak.
"Ons raamwerk biedt ook een gebruikersinterface voor de onderzoekers om hun HRC-experimenten opnieuw af te spelen en te visualiseren, " zei Kumar. "Bovendien, het stelt hen in staat om de verzamelde gegevens te analyseren en te labelen. De continue en synchrone verzameling van fysiologische gegevens van verschillende apparaten en deze samen met de robotbesturing en interface in een enkel ecosysteem, maakt een volledige weergave van de staat van mens en robot mogelijk. Dit kan helpen om de oorzaak en het gevolg tussen de menselijke fysiologische toestand en de bewegingen van de robot te begrijpen."
Met de komst van draagbare apparaten en het Internet of Things (IoT), menselijke fysiologische gegevens zullen gemakkelijker te verzamelen en dus direct beschikbaar zijn. Het door het onderzoek ontwikkelde raamwerk zou dus zeer waardevol kunnen zijn, omdat het is ontworpen om deze gegevens te gebruiken om de interactie tussen mens en robot te verbeteren.
"Dit raamwerk maakt een continue gegevensregistratie mogelijk met ingebouwde gebeurtenisgeneratie en signaalsynchronisatie over gedistribueerde systemen, kan de integriteit van het experiment behouden (het scenario van een taak in een industriële omgeving recreëren) en de subjectieve gegevens nauwkeurig weergeven, ' zei Kumar.
Kumar en zijn collega's zijn van mening dat een agent die in staat is tot dergelijk fysiologisch computergebruik (d.w.z. die menselijke fysiologische reacties kan detecteren en hierop kan reageren) zou kunnen resulteren in een gesloten mens-in-the-loop-systeem, waar zowel menselijke gebruikers als robots in een HRC-opstelling worden gemonitord en informatie tussen hen wordt gedeeld. Dit kan leiden tot een betere communicatie, die uiteindelijk zou kunnen leiden tot meer vertrouwen in automatisering bij het publiek, terwijl ook de productiviteit wordt verhoogd. In de toekomst, de onderzoekers zijn van plan de in hun onderzoek gegenereerde databases beschikbaar te stellen aan andere HRI-onderzoekers.
"Onze volgende studies zullen zich richten op het ontwikkelen van een complete gebruikersinterfacetoepassing van het fysiologische computersysteem voor het verwerken van opnamesignalen, het extraheren van informatie en het toepassen van een machine learning-algoritme om feedback te geven aan de robot, " zei Kumar. "Het uiteindelijke doel van dit werk is het genereren van een database die kan worden gebruikt om het begrip te vergroten van hoe menselijke fysiologische reacties kunnen worden afgeleid om te resulteren in adaptief robotbewegingsgedrag."
© 2019 Wetenschap X Netwerk
 Nanomagneten voor toekomstige gegevensopslag
Nanomagneten voor toekomstige gegevensopslag- Chemici helpen kans een handje
- Onderzoeker gebruikt netwerkwetenschap om te begrijpen hoe materialen werken
- Chemici creëren nieuwe diagnostische methode voor moeilijke klimatologische omstandigheden
- Subtiele sterische verschillen onthullen een model voor Ni-kruiskoppelingssucces
Hoofdlijnen
- Zeldzame witte tijger met kanker sterft in dierentuin
- Wat zijn de functies van glazen schuif- en afdekglaasjes?
- Wat zijn de functies van Triglyceride Phospholipid & Sterol?
- Pas op voor de huisdieren bij het hanteren van de Halloween-snoepvangst
- De verbazingwekkende diversiteit – en mogelijk verval – van paddenstoelen en andere schimmels
- Wat is het verschil tussen continue en discontinue DNA-synthese?
- Tagged slakken om onderzoekers te helpen de groei van de slakkenpopulatie te volgen
- Frankrijk verzet zich tegen EU-verlenging van 5 jaar voor onkruidverdelger glyfosaat
- 10, 000 jaar oud DNA bewijst wanneer vissen meren koloniseerden
- Stroom verhongerde Nigeria op de rand nadat zes fabrieken waren gesloten

- Wat is de toekomst voor contant geld? Uitval van doelregisters bewijzen dat fysieke buit nog steeds zijn plaats heeft

- Geheugenverwerkingseenheid kan memristors naar de massa brengen
- Drie manieren waarop big data onthult wat je echt leuk vindt om naar te kijken, lees en luister naar

- Vreselijk of gewoon slecht? Beleggers zetten zich schrap voor lelijke Q1-winsten


 Wat is een toroidespoel?
Wat is een toroidespoel? - Nieuwe theorie ontsluit het geheim achter eiwit-membraan-interacties
- Ingenieurs gebruiken Tiki-fakkels bij onderzoek naar roet, dieselfilters
- QU-onderzoeksteam innoveert manieren om nieuwe nanokatalysatoren te synthetiseren
- Vakbonden roepen op tot onderzoek door de VS naar tactieken van Amazon
- Monsterbeeld van de Fornax Galaxy Cluster
- Amazon voegt nieuwe optie toe:Kopen op Amazon, ophalen bij Rite Aid
- Wat zijn de kleuren in de regenboog?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
