Wetenschap
Een raamwerk voor adaptieve taaktoewijzing tijdens missies met meerdere robots
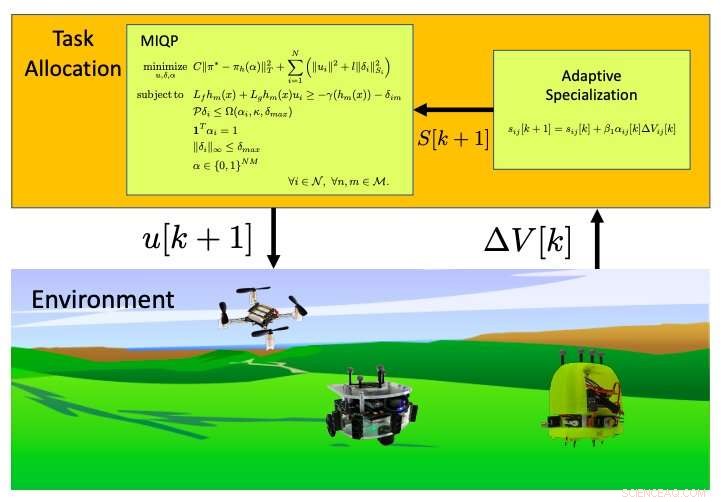
Een figuur die de voorgestelde feedbacklus illustreert tussen het raamwerk voor taaktoewijzing, de omgeving, en de adaptieve specialisatie-update. De effectiviteit van de robots bij elke taak wordt gemeten als ∆V [k], die wordt doorgegeven aan de adaptieve specialisatie-updatewet. Zodra de nieuwe specialisatieparameters zijn berekend, de taaktoewijzing MIQP is opgelost en de invoer wordt naar de robots gestuurd. Krediet:Emam et al.
In recente jaren, robots zijn steeds geavanceerder geworden, vandaar dat ze nu in staat zijn om een breed scala aan taken uit te voeren. Hoewel sommige robots zijn ontworpen om individueel te werken, bijvoorbeeld het verlenen van basishulp bij mensen thuis, andere zijn mogelijk efficiënter wanneer ze in teams worden ingezet.
Tijdens zoek- en reddingsmissies, bijvoorbeeld na natuurrampen, robots kunnen effectiever zijn als een team, omdat ze sneller voorraden konden leveren of naar overlevenden konden zoeken, die grotere geografische regio's bestrijken. Om missies als team zo efficiënt mogelijk te voltooien, echter, robots moeten goed kunnen samenwerken en verschillende taken goed onder elkaar kunnen verdelen.
Met dit in gedachten, onderzoekers van Georgia Institute of Technology (Georgia Tech) hebben onlangs een raamwerk ontwikkeld voor adaptieve taaktoewijzing tijdens missies die moeten worden voltooid door een team van robots. Hun kader, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, kan taken toewijzen aan robots op basis van hun unieke mogelijkheden en kenmerken.
"Het is de bedoeling dat robotteams in dynamische omgevingen werken en dit document stelt een bijgewerkte regel voor waarmee robots kunnen weten hoe geschikt ze zijn voor elk van de verschillende taken die ze on-the-fly krijgen toegewezen, "Yousef een Emam, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore.
Het door de onderzoekers ontwikkelde raamwerk is gebaseerd op een taaktoewijzingstechniek voor heterogene multi-robotsystemen die ze in een eerder artikel hebben geïntroduceerd. Deze eerder bedachte strategie omvat het gebruik van een algoritme dat rekening houdt met verschillen in individuele robotcapaciteiten en taken dienovereenkomstig toewijst. De toewijzing en uitvoering van deze taken vinden gelijktijdig plaats.
"Ons framework lost optimalisatieproblemen online op, individuele robots vertellen hoe ze prioriteit moeten geven aan hun bijdragen aan de verschillende taken die ze moeten uitvoeren (d.w.z. taakverdeling), en hoe u dat doet (d.w.z. taakuitvoering), ' zei Emam.
In hun studie hebben Emam en zijn collega's bouwden voort op de taaktoewijzingsstrategie die ze eerder ontwikkelden, waardoor het beter reageert op veranderingen in de omgeving van de robots. In tegenstelling tot de vorige versie, hun nieuwe raamwerk vereist geen expliciet model van de omgeving of van onbekende robotcapaciteiten. In plaats daarvan, het houdt in de eerste plaats rekening met de collectieve vooruitgang die het team van robots heeft gemaakt op een bepaalde missie en de prestaties van elke robot op individuele taken.
"In ons recente onderzoek we hebben een feedbackwet ontwikkeld die het eerder ontwikkelde raamwerk adaptief maakt voor omgevingsstoringen, " legde Emam uit. "Dit betekent dat zelfs als de robot geen perfecte kennis heeft van hoe geschikt hij is voor elk van de taken, het zal het on-the-fly leren."
De onderzoekers evalueerden hun raamwerk in een reeks simulaties en ontdekten dat het veelbelovende resultaten opleverde. Bij deze experimenten hun aanpak maakte een effectieve taakverdeling tussen robots mogelijk onder verschillende omgevingsomstandigheden, zelfs in gevallen waarin de mogelijkheden van individuele robots onbekend waren voordat ze werden ingezet.
In de toekomst, het door Emam en zijn collega's ontwikkelde raamwerk voor taaktoewijzing en uitvoering kan de samenwerking tussen robots die als team worden ingezet, verbeteren, het verbeteren van hun collectieve prestaties. Dit zou uiteindelijk de grootschalige mobilisatie van robots tijdens zoek- en reddingsmissies kunnen vergemakkelijken.
"We werken momenteel aan het uitbreiden van het raamwerk om de functies van elke robot (bijv. sensoren, aandrijvers), zodat we functiestoringen online explicieter kunnen modelleren, "Zei Emam. "Bovendien, een ander aspect waar we naar kijken is de verdeling van berekeningen onder de robots (gedecentraliseerd)."
© 2020 Wetenschap X Netwerk
 Onderzoekers creëren kunstkraakbeen dat zichzelf kan herstellen
Onderzoekers creëren kunstkraakbeen dat zichzelf kan herstellen- Maak een lijst van de drie soorten straling die worden afgegeven tijdens radioactief verval
- Multi-inch monokristallijn perovskiet voor zelfaangedreven fotodetectie met geïntegreerde schakelingen gerapporteerd
- Nieuw proces verkleint de kloof tussen natuurlijke en synthetische materialen
- Hoe het aantal elektronen met kwantumnummers te bepalen
Hoofdlijnen
- Boot die Steinbeck naar de Zee van Cortez bracht wordt gerestaureerd
- Hoe moleculaire scharen ziekten kunnen oplossen en DNA kunnen bewerken
- Wat is de functie van de promotor in de transcriptie van DNA?
- Zeebodemlandschap cruciaal voor visbehoud
- Inleiding tot hoe gigantische virussen werken
- Waar worden mensen blij van?
- Over leverfuncties in het menselijk lichaam
- Biology Science Fair Projects
- Hoe zou zout Gist beïnvloeden?
- Door virus getroffen Air New Zealand bood reddingsoperatie van US $ 515 miljoen

- Wat biedt de toekomst voor slimme huizen:een internet van oren?

- Apple repareert FaceTime-bug die afluisteren mogelijk maakt

- Door het type siliciumets te veranderen, worden de kosten van zonne-energie met meer dan 10 procent verlaagd

- Apple iPhones kunnen jarenlang gehackt zijn - dit is wat je eraan kunt doen


 Asteroïde Ryugu-stof afgeleverd aan de aarde; Astrobiologen van NASA bereiden zich voor om het te onderzoeken
Asteroïde Ryugu-stof afgeleverd aan de aarde; Astrobiologen van NASA bereiden zich voor om het te onderzoeken- Video:De krill-factor bij het mengen van oceanen
- Opzettelijke onwetendheid:hoe we informatie vermijden en waarom het soms nuttig is om dat te doen
- Vraag en antwoord:Is jagen met loden munitie een gevaar voor de mens, milieugezondheid?
- Diversiteit van grote dieren speelt een belangrijke rol in koolstofcyclus
- Sterrenmensen
- New Horizons maakt zich klaar voor nieuwjaarsvlieg langs Ultima Thule
- Strijd om te ontsnappen aan verre sterrenstelsels creëert gigantische halo's van verspreide fotonen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
