Wetenschap
Voetgangers:een tweevoetige robot die zijn loopstijl aanpast aan veranderingen in de omgeving

Voetgangers, de tweevoetige robot ontwikkeld door de onderzoekers, naast een menselijke gebruiker de straat oversteken. Krediet:Ahmad et al.
Mensen zijn over het algemeen in staat om hun loopstijl aan te passen aan de omgeving waarin ze zich bewegen, bijvoorbeeld, versnellen als de consistentie van de grond onder hun voeten het toelaat, vertragen als de vloer glad is, van richting veranderen om plassen of gaten in de grond te vermijden, enzovoort. Om door verschillende omgevingen te navigeren, robots moeten hun loopgedrag op een vergelijkbare manier kunnen aanpassen, hun structuur aanpassen aan veranderingen in de omgeving.
Met dit in gedachten, Onderzoekers van de Osaka University in Japan hebben onlangs PedestriANS, een tweevoetige robot die sommige fysieke kenmerken en bewegingen van zijn benen kan veranderen als reactie op veranderingen in zijn omgeving. Deze nieuwe robot, gepresenteerd in een paper gepubliceerd in het tijdschrift van SAGE Adaptief gedrag , kan zijn loopstijl veranderen met behulp van een eenvoudig systeem dat de bewegingen en configuratie van zijn twee benen verbindt.
"Het hoofddoel van ons werk is het ontwikkelen van robuuste robots die verstoringen aankunnen; robots die mensen kunnen begeleiden en effectief kunnen lopen over zowel vlakke als oneffen terreinen zoals gras en grind, "Huthaifa Ahmad, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Om dit doel te bereiken, we moeten robotsystemen ontwikkelen met een adaptieve morfologie; want zelfs met de meest geavanceerde tweevoetige robots die tegenwoordig beschikbaar zijn, het hebben van een nauwkeurig model van zowel het robotlichaam als de omgeving is cruciaal om goed te kunnen werken."
Voetgangers, de robot ontwikkeld door Ahmad en zijn collega's, vertrouwt op een actuatornetwerksysteem (ANS), een ontwerpconcept geïntroduceerd in hun eerdere werk. In hun eerdere studies, de onderzoekers verwerkten hetzelfde concept in verschillende andere toepassingen, inclusief robotachtige stekels, armen en meerbenige robots.
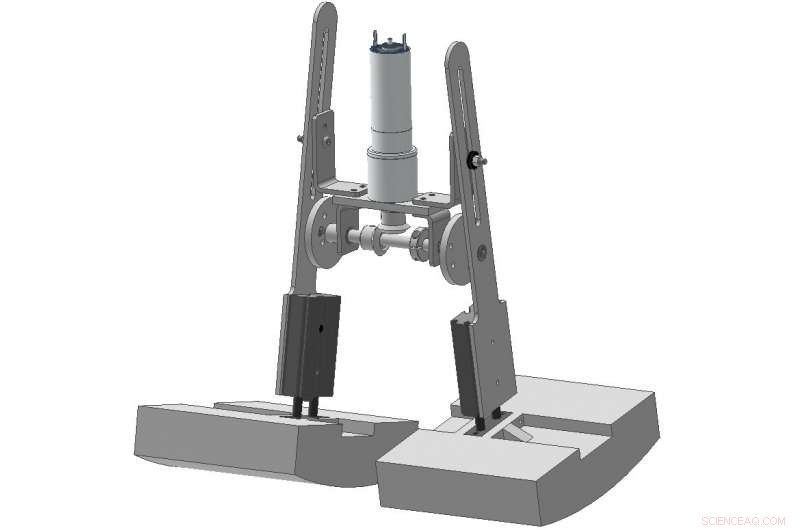
Een illustratie van Voetgangers. Krediet:Ahmad et al.
"Aangezien de haalbaarheid ervan in verschillende onderzoeken is aangetoond, Ik gebruik momenteel het ANS-principe in mijn onderzoek om aanpasbare robots te realiseren, door gebruik te maken van de verschillende interacties tussen de gemonteerde actuatoren op hun lichaam, ' zei Achmed.
De bewegingen van de door Ahmad en zijn collega's ontwikkelde robot worden geproduceerd door een enkele motor, en zijn poten zijn met elkaar verbonden via een ANS. In tegenstelling tot andere tweevoetige robots gebaseerd op complexe systemen, PedestriANS heeft een vrij eenvoudige structuur. De robot past zich aan veranderingen in zijn omgeving aan door gebruik te maken van fysieke kenmerken van zijn benen en interacties tussen zijn verschillende componenten, wat resulteert in een reeks verschillende loopgedragingen.
"Het loopgedrag van de robot verandert door de interactie tussen de actuatoren van de ANS te veranderen, "Ahmad zei. "Om beter gedrag te produceren, de vraag van de robot naar een bepaald verbindingspatroon is afhankelijk van de gegeven situatie. Ons werk suggereert dat de beste manier om zelfaanpasbare robots te realiseren, is door ze in staat te stellen hun morfologieën aan te passen en hun dynamiek van het hele lichaam te benutten als reactie op veranderingen in de omgeving"

Voetgangers, de tweevoetige robot ontwikkeld door de onderzoekers. Krediet:Ahmad et al.
De onderzoekers evalueerden de prestaties van hun robot in een reeks experimenten. Ten eerste, ze testten hoe verschuivingen in de morfologie van de robot zijn loopgedrag beïnvloedden door zijn vermogen om zich aan te passen aan verschillende grondmaterialen te observeren, gericht op veranderingen in zijn loopstijl, stabiliteit, snelheid, en de richting waarin het bewoog.
Na analyse van de resultaten verzameld in dit eerste experiment, Ahmad en zijn collega's hebben het ontwerp van de robot zo geüpgraded dat hij automatisch over verschillende verbindingspatronen tussen zijn benen kon schakelen. Vervolgens voerden ze een tweede evaluatie uit en vonden significante verbeteringen in de manier waarop de robot zijn morfologie tijdens het voortbewegen aanpaste. In dit tweede experiment Voetgangers produceerden effectief aanpasbare loopstijlen als reactie op de omgeving waarin ze opereerden.
In de toekomst, de robot die door dit team van onderzoekers is ontwikkeld, kan worden gebruikt om taken uit te voeren waarbij zich in ongecontroleerde en voortdurend veranderende omgevingen moet bewegen. Hoewel Voetgangers het type interactie tussen zijn benen kunnen veranderen om ander bewegingsgedrag te produceren dat het beste bij zijn omgeving past, het kan nog steeds niet autonoom de morfologische aanpassingen identificeren die het meest geschikt zijn voor specifieke situaties. De onderzoekers zijn van plan te blijven werken aan de robot om deze belangrijke mogelijkheid mogelijk te maken, die nodig is om de robot te laten werken zonder voortdurende menselijke inbreng en begeleiding.
"De volgende stap in ons onderzoek zal zijn om een besturingssysteem te realiseren waarmee de robot de beste prestaties kan blijven leveren tijdens alle bewegingsfasen, autonoom een adequaat verbindingspatroon selecteren, " zei Ahmad. "Bovendien, door de ANS uit te breiden met meer delen van de robot (bijv. bovenlichaam), dit zal de mogelijke morfologische veranderingen vergroten, die op zijn beurt reflecteert op het aanpassingsvermogen van de robot."
© 2020 Wetenschap X Netwerk
 Wat gebeurt er wanneer je droog ijs in water legt?
Wat gebeurt er wanneer je droog ijs in water legt? - Nobelprijswinnende techniek zoals Google Earth voor moleculen
- Een kaart van reacties helpt bij het controleren van moleculaire eigenschappen
- Type reacties met koper en salpeterzuur
- Moleculaire steiger voor het wijzigen van fluorescerende verbindingen die worden gebruikt in biologische beeldvorming
Hoofdlijnen
- Oncogene: wat is het? & Hoe beïnvloedt het de celcyclus?
- De verschillen tussen fotosynthese en ademhaling
- Woestijnsprinkhanen - nieuwe risico's in het licht van klimaatverandering
- Wat zijn fysieke kenmerken die worden doorgegeven van ouders?
- Genmutatie: definitie, oorzaken, typen, voorbeelden
- 2 Voorbeelden van Heterozygote eigenschappen
- De juiste manier om DNA te repareren
- Wanneer is een mutatie in een DNA-molecuul overgegaan op nakomelingen?
- Belangrijke plantensoorten kunnen belangrijk zijn voor het ondersteunen van bestuivers van wilde bloemen
- Engineers 3D-print flexibel mesh voor enkel- en kniebraces

- Philips Lighting sluit zich aan bij Amsterdamse top AEX-index

- Studie:Ruslands webcensureringstool zet de toon voor navolgers
- News Corp meldt verlies op afschrijvingen, zwakte in kranten

- Ingenieur ontwikkelt browsergebaseerd analysekaderwaarnemer


 Nieuwe studie onthult langetermijneffecten van rampengerelateerde schoolsluitingen
Nieuwe studie onthult langetermijneffecten van rampengerelateerde schoolsluitingen- Laatste weken van historisch orkaanseizoen brengen nieuwe stormen
- Bevooroordeelde lokale berichtgeving draagt bij aan verkrachtingscultuur
- Eieren gebruiken als een tandheelkundig hygiëneprobleem
- Nanotechnologie verbetert de toediening van chemotherapie
- IJsverlies zal waarschijnlijk doorgaan op Antarctica
- Onderzoekers beoordelen methoden voor schatting van de hemelzichtfactor
- Succesvolle boordoping van grafeen nanoribbon
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
