Wetenschap
Googles robot leert lopen in de echte wereld
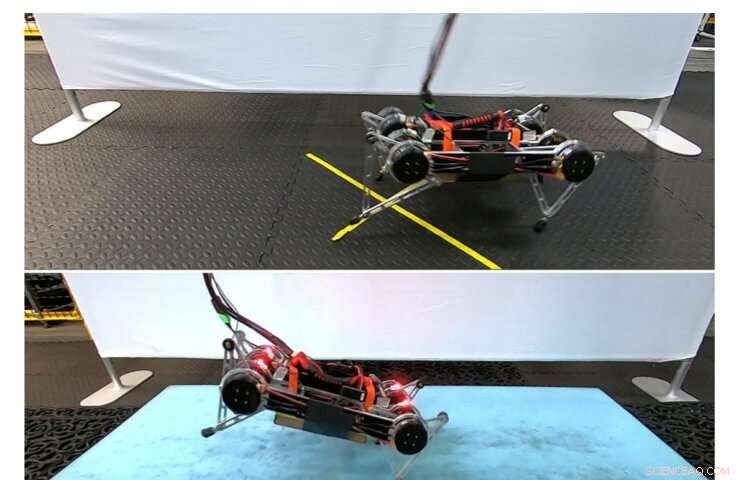
Krediet:arXiv:2002.08550 [cs.RO]
Het gebied van robotica deed een stap vooruit - gevolgd door een andere, en nog een paar - toen een robot genaamd Rainbow Dash zichzelf onlangs leerde lopen. De machine met vier poten had maar een paar uur nodig om achteruit en vooruit te leren lopen, en draai daarbij rechts en links.
Onderzoekers van Google, UC Berkeley en het Georgia Institute of Technology publiceerden een paper over de ArXiv preprint-server waarin ze een statistische AI-techniek beschrijven die bekend staat als deep wapeningsleren die ze gebruikten om deze prestatie te produceren, wat om verschillende redenen belangrijk is.
De meeste implementaties van versterkingsleren vinden plaats in computergesimuleerde omgevingen. regenboog streepje, echter, gebruikte deze technologie om te leren lopen in een echte fysieke omgeving.
Bovendien, het was in staat om dit te doen zonder een specifiek leermechanisme, zoals menselijke instructeurs of gelabelde trainingsgegevens. Eindelijk, Rainbow Dash slaagde erin op meerdere oppervlakken te lopen, inclusief een zacht schuimmatras en een deurmat met vrij opvallende uitsparingen.
De diepe leertechnieken die de robot gebruikte, omvatten een soort machine learning waarbij een agent interageert met een omgeving om met vallen en opstaan te leren. De meeste use-cases voor versterkingsleren hebben betrekking op geautomatiseerde games waarin digitale agenten leren spelen om te winnen.
Deze vorm van machinaal leren verschilt aanzienlijk van traditioneel leren onder toezicht of zonder toezicht, waarin machine learning-modellen gelabelde trainingsgegevens nodig hebben om te leren. Diep versterkend leren combineert benaderingen van versterkend leren met diep leren, waarin de schaal van traditionele machine learning enorm wordt uitgebreid met enorme rekenkracht.
Hoewel het onderzoeksteam Rainbow Dash heeft gecrediteerd voor het zelf leren lopen, menselijk ingrijpen speelde nog steeds een substantiële rol bij het bereiken van dat doel. Onderzoekers moesten grenzen creëren waarbinnen de robot leerde lopen om te voorkomen dat hij het gebied verlaat.
Ze moesten ook specifieke algoritmen bedenken om te voorkomen dat de robot naar beneden zou vallen, waarvan sommige gericht waren op het beperken van de beweging van de robot. Om ongevallen zoals valschade te voorkomen, Het leren van robotica-versterking vindt meestal plaats in een digitale omgeving voordat algoritmen worden overgedragen aan een fysieke robot om zijn veiligheid te behouden.
De triomf van Rainbow Dash vindt plaats ongeveer een jaar nadat onderzoekers er in eerste instantie achter kwamen hoe ze robots konden laten leren in fysieke, in tegenstelling tot virtuele, omgeving.
Chelsea Finn, een Stanford-assistent-professor verbonden aan Google die niet heeft deelgenomen aan het onderzoek, zegt, "De persoon uit het [leer]proces halen is heel moeilijk. Door robots meer autonoom te laten leren, robots zijn dichter bij het kunnen leren in de echte wereld waarin we leven."
© 2020 Wetenschap X Netwerk
 Onderzoekers gebruiken zink om insulineproducerende cellen aan te vallen met regeneratief medicijn
Onderzoekers gebruiken zink om insulineproducerende cellen aan te vallen met regeneratief medicijn- Bitterreceptor betrokken bij ontstekingsremmend effect van resveratrol?
- Spannende nieuwe ontwikkelingen voor polymeren gemaakt van afvalzwavel
- Hoe te vinden hoeveel Mollen in een samenstelling zitten
- Welke rol spelen vitaminen in enzymactiviteit?
- Earth first origins-project probeert de wieg van het leven na te bootsen
- Radarsatellieten kunnen beter beschermen tegen bosbranden en overstromingen
- Nieuwe studie helpt beleidsmakers de opwarming van de aarde tegen te gaan met technologie voor negatieve emissies
- Stijgende koolstofprijzen leidden tot een daling van de Duitse uitstoot in 2019
- VN:Grote veranderingen in de samenleving nodig om de natuur te behouden, Aarde OK
Hoofdlijnen
- Wat is een zuivere eigenschap en een hybride eigenschap?
- Laat mijn brein me dingen kopen die ik niet nodig heb?
- Procedures voor elektroforese van gel
- Welk deel van het Nephron is verantwoordelijk voor de reabsorptie van water?
- Belang van diffusie in organismen
- Wat zijn de twee hoofdfasen van celdeling?
- Wanneer werden DNA-testen het eerst gebruikt?
- Hoe beïnvloedt de structuur van DNA zijn functie?
- Europa zet $ 1,18 miljard in om het leven in zee beter te beschermen
- Omroep dringt er bij voetbalautoriteiten op aan de markt niet over te laten aan criminelen

- Opel snijdt uren te midden van somberheid Duitse autofabrikant

- Amerikaanse tech-industrie koelt Trump-deal over digitale belasting in Frankrijk

- Besturing van slangachtige robots voor hoge mobiliteit en behendigheid

- Zorgen blijven hangen over robots op de werkplek, zelfs als ze voordelen opleveren


 Fukushima:Waarom we duizenden jaren terug moeten kijken om beter te worden in het voorspellen van aardbevingen
Fukushima:Waarom we duizenden jaren terug moeten kijken om beter te worden in het voorspellen van aardbevingen- Naschokken vulkaan rammelen stad DR Congo terwijl dodental stijgt
- Orkaan van donkere materie biedt kans om axions te detecteren
- Ben je veilig voor bliksem als de lucht helder is?
- NASA heeft de regenval van Typhoon Prapiroons opgeteld
- Archeologen in Egypte ontdekken mummificatieworkshop
- UCLA-onderzoeker benadrukt vooruitgang in de strijd tegen kanker door nanotechnologieën
- Hoe Borax Powder
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Spanish | Norway |

-
Wetenschap © https://nl.scienceaq.com
