Wetenschap
Besturing van slangachtige robots voor hoge mobiliteit en behendigheid
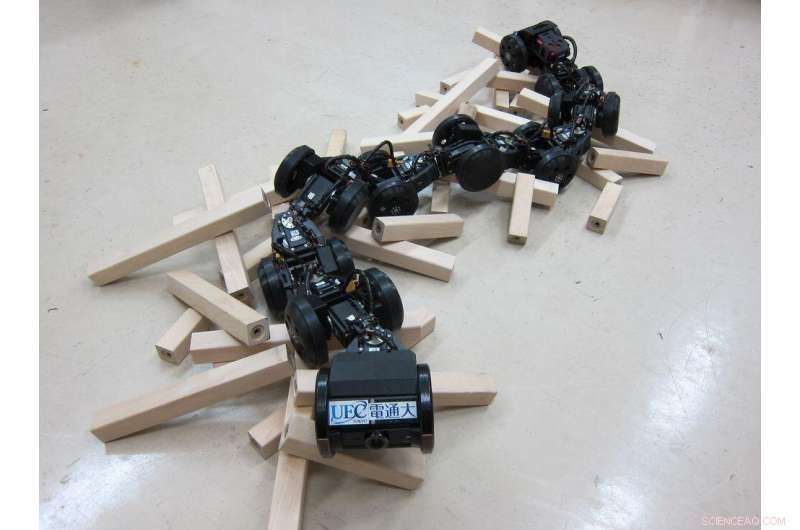
De slangachtige robot T 2 Slang-3. Krediet:University of Electro Communications
Slangachtige gelede mobiele robots kunnen nauwe ruimtes betreden en obstakels beklimmen met hun lange en dunne lichamen, en zijn effectief voor inspectie van nauwe ruimtes en zoek- en reddingsoperaties op ramplocaties. Echter, het is moeilijk om hun precieze bewegingen te controleren omdat ze zoveel actuatoren hebben.
Nutsvoorzieningen, Motoyasu Tanaka en collega's van de University of Electrocommunications Tokyo, methoden voorstellen om slangachtige robots te besturen voor driedimensionale besturing, traplopen en objecten manipuleren, en hebben de slangachtige robot T . ontwikkeld 2 Slang-3. Bij driedimensionale besturing, de robot volgt het omliggende terrein door zijn gewrichten te ontspannen, en gaat dan verder met bewegen vanuit de houding van de robot. Met deze methode kan de operator de robot gemakkelijk besturen en verplaatsen op oneffen terrein. Voor traplopen, de robot verschuift autonoom zijn beweging op trappen van kop naar staart op de juiste timing, omdat gegevens van sensoren die aan de onderkant van de robot zijn bevestigd, worden gebruikt om de beweging te activeren. Voor het manipuleren van een object, de positie en oriëntatie van de grijper die op het hoofd van de robot is bevestigd, wordt gecontroleerd door de juiste houding aan te houden door autonoom de toewijzing van de opgeheven/geaarde wielen te selecteren. Hoewel de robot T 2 Snake-3 heeft ongeveer dertig actuatoren, de operator kan de robot eenvoudig bedienen met behulp van deze methoden en een gamepad.
De robot T 2 Snake-3 ging nauwe ruimtes binnen, een trede van een meter hoog beklimmen, Trappen beklimmen, en roterende kleppen met behulp van de voorgestelde methoden. De slangachtige robot werd effectief bestuurd voor inspectieapparatuur en rampenbestrijding.
 Nieuwe methode voor synthese van moleculaire waterstof stelt maatstaf voor platinavrije elektrokatalysatoren
Nieuwe methode voor synthese van moleculaire waterstof stelt maatstaf voor platinavrije elektrokatalysatoren- Welke vloeistoffen koken bij een lagere gastemperatuur dan water?
- Hoe u pH-strips gebruikt om water te testen
- De katalytische code kraken
- Milieuvriendelijk kooldioxide-conversieproces kan een revolutie teweegbrengen in de bestaande methode
- Klimaatverandering verandert de beschikbaarheid van terrestrisch water
- De eeuwenoude menselijke geschiedenis van de Amazone staat in de bomen geschreven
- Catastrofale vervuiling plaagt de stranden van Libië
- Wil je klimaatverandering tegengaan? Hier zijn 8 stappen die je kunt nemen
- Leven met aardgaspijpleidingen:Appalachian landeigenaren beschrijven angst, angst en verlies
Hoofdlijnen
- Nieuw algoritme herkent duidelijke dolfijnklikken in onderwateropnamen
- Studie toont aan dat boomspitsen evolutionaire regels overtreden
- Hoe een celvorm zijn functie beïnvloedt
- Op de vleugels van Lepidoptera
- In stedelijke stromen, farmaceutische vervuiling stimuleert microbiële resistentie
- Wilgenroosje:de roze pionier
- Arctisch, grote visserslanden zijn het erover eens dat er niet gevist wordt in het noordpoolgebied, voor nu
- Regenwormen kunnen zich voortplanten in Mars-bodemsimulant
- Wetenschappers ontwerpen nieuwe moleculen die resistentie tegen conventionele antibiotica kunnen overwinnen
- Je kunt deze op kakkerlakken geïnspireerde robot niet pletten

- Japanse drone-brella belooft handsfree zonnescherm

- Om e-mailoplichters te bestrijden, een andere kijk nemen. Letterlijk.

- Tesla roept 14 terug 000 auto's in China vanwege Takata-airbags

- APNewsBreak:VS vermoedt spionageapparatuur voor mobiele telefoons in DC


 Een atoomchip-interferometer die kwantumzwaartekracht kan detecteren
Een atoomchip-interferometer die kwantumzwaartekracht kan detecteren- Hackers maken gepersonaliseerde ransomware om de meest winstgevende en kwetsbaren te targeten
- Eenfasige covalente organische raamwerkmembranen maken CO2-selectieve scheiding mogelijk
- Aandacht Verenigde Naties:laat u niet misleiden door het laatste Australische rapport over het Great Barrier Reef
- Hoe internationale studenten beslissingen nemen over een verblijf in Canada
- Rook van bosbranden in Australië gelinkt aan honderden doden
- Een atoom kietelen om het gedrag van materialen te onderzoeken
- In navolging van de natuur, onderzoekers bouwen succesvolle, duurzame industriële netwerken
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
