Wetenschap
Een vormgeheugenpolymeer gebruiken als robotgrijper
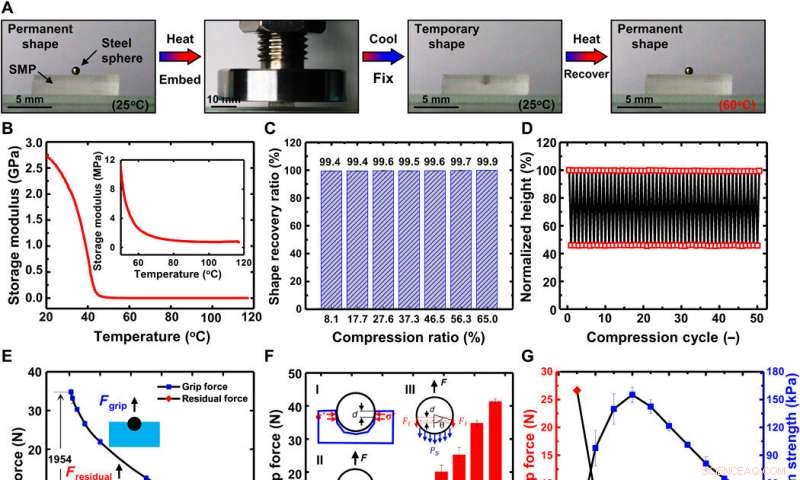
Karakterisering van het epoxy SMP materiaal en de SMP grijper. (A) Demonstratie van de tijdelijke vormbevestiging en het permanente vormgeheugeneffect van de SMP. (B) Opslagmodulus versus temperatuur van het SMP-materiaal. Inzetstukken:Vergroting van de opslagmodulus versus temperatuur bij hogere temperaturen. (C) Vormherstelverhouding van de SMP onder verschillende compressieverhoudingen. (D) Prestaties van de SMP onder herhaalde compressie. (E) Vergelijking van de grip en restkrachten als functie van de gripsnelheden. Parameters voor de meting van de grijpkracht:temperatuur voor inbedding, 120 °C; temperatuur voor trekken, 30°C; diepte inbedden, 3mm; diameter van de indringer, 5mm. (F) Invloed van de inbeddingshoek op de grijpkracht (temperatuur voor inbedding, 120 °C; temperatuur voor trekken, 30°C; diameter van de indringer, 5mm; grip snelheid, 100 µm/s). Inzetstukken tonen het onderliggende mechanisme van het grijpen. (I en II) Profielillustraties die de configuratie-evolutie van de SMP-grijper en het ingebedde bolsysteem tijdens het grijpproces tonen. (III) Krachtdiagram van de ingebedde bol in verticale richting. (G) Invloed van de temperatuur op de grijpkracht. De lijn met rode ruiten geeft de gripkracht, terwijl de lijn met blauwe vierkantjes de hechting aangeeft. De grijpkracht wordt verkregen uit de inbeddings- en uittrekproeven (temperatuur voor inbedding, 120 °C; temperatuur voor trekken, 30°C; diameter van de indringer, 5mm; diepte inbedden, 3mm; grip snelheid, 1000 m/s), terwijl de adhesiesterkte onder dezelfde scheidingssnelheid (1000 m/s) wordt verkregen door trekproeven tussen een glasplaat en de SMP. Fotocredit:Changhong Linghu, Zhejiang-universiteit. Credit: wetenschappelijke vooruitgang (2020). DOI:10.1126/sciadv.aay5120
Een team van onderzoekers van de Zhejiang University heeft een nieuwe robotgrijper gemaakt met behulp van een vormgeheugenpolymeer. In hun artikel gepubliceerd in het tijdschrift wetenschappelijke vooruitgang , de groep beschrijft het materiaal, het gebruik ervan als grijper, en hoe goed het werkte.
In de afgelopen decennia is wetenschappers hebben verschillende benaderingen gebruikt om een robot de mogelijkheid te geven om objecten op te pakken, te manipuleren en weer neer te zetten - allemaal zonder het object te beschadigen. Er is veel vooruitgang geboekt op het gebied van robotgrijpers, grotendeels te danken aan de vooruitgang in de microchiptechnologie, maar er is nog veel ruimte voor verbetering. Een van de grootste uitdagingen is het ontwikkelen van een grijper die objecten van bijna elke vorm kan oppakken en manipuleren, verschillende maten, en gemaakt van verschillende materialen. Een menselijke handachtige grijper creëren die een speld van een tafel kan pakken, een rauw ei door een kamer dragen of een kinderlint in het haar binden, vereist een zeer geavanceerde grijper en bijbehorende software. In deze nieuwe poging de onderzoekers hebben de behoefte aan verfijning weggenomen door een heel andere aanpak te kiezen.
Voorafgaand onderzoek heeft aangetoond dat wanneer bepaalde polymeren worden verwarmd, ze zetten iets uit en worden zacht. De onderzoekers gebruikten beide eigenschappen om hun nieuwe grijper te creëren. Ze creëerden een polymeergrijper die zachter wordt bij verhitting tot 45°C en weer hard wordt bij blootstelling aan 25°C. De basisvorm is rechthoekig (een 3D-rechthoek). Vervolgens bevestigden ze de grijper aan een eenvoudige arm die de grijper tegen een tafelblad kon plaatsen of net boven de tafel kon optillen - genoeg om verschillende objecten eronder te plaatsen.
Testen omvatte het plaatsen van een object zoals een kleine stalen kogel onder de grijper en vervolgens het hele apparaat in een behuizing verwarmen tot 45°C. Na een paar minuten, het polymeer was zacht geworden. De onderzoekers lieten de grijper vervolgens op het object zakken, waardoor het object kan worden omsloten - vergelijkbaar met het plaatsen van een zacht stuk boter op een vork. De temperatuur in de behuizing werd vervolgens verlaagd tot 25°C. Op dat punt, het polymeer kromp lichtjes, het object vastgrijpen terwijl het steviger werd. De onderzoekers tilden vervolgens de grijper en het object dat het vasthield op. Om het object weer neer te zetten, de onderzoekers lieten de grijper op tafel zakken en verhoogden de temperatuur in de behuizing tot 45°C.
© 2020 Wetenschap X Netwerk
 Het bereik van therapeutische antilichamen vergroten
Het bereik van therapeutische antilichamen vergroten- Snelle oppervlaktedynamiek maakte koude verbinding van metalen glazen mogelijk
- Gecombineerde databenadering kan de ontwikkeling van nieuwe materialen versnellen
- Schimmel als geluidsabsorbeerder
- Een halfgeleiderchip detecteert antigeenconcentraties bij 1 delen per quadriljoen molmassa
- Eetbare planten die leven in de loofbos
- Zweet, bleekmiddel en luchtkwaliteit in de sportschool
- Waarom het houden van één volwassen straatboom veel beter is voor mens en natuur dan veel nieuwe planten
- Economische techniek verwijdert geneesmiddelen, chemische verontreinigingen uit openbare watersystemen
- Fotosynthese in pijnbomen
Hoofdlijnen
- De twee soorten exocriene secretoire cellen in de maag
- Angiospermen: definitie, levenscyclus, soorten en voorbeelden
- Het belang van het bestuderen van de DNA-genetica van het menselijk geslacht
- De voordelen van het bestuderen van cellen onder een lichtmicroscoop
- Onderzoek onthult nieuwe onkruidbestrijdingsopties voor aardbeientelers
- Mitochondria-afweer van dieren ontdekt in planten
- Organisme: definitie, types, kenmerken en voorbeelden
- Vogels leren van elkaars walging, waardoor insecten felle kleuren kunnen ontwikkelen
- De verschillen tussen mannelijke pollen en vrouwelijke zaden dennenappels
- Drones die door een snorhaar voelen

- Compact, goedkope vingerafdruklezer zou de kindersterfte over de hele wereld kunnen verminderen

- 3D-geprinte bewegingssculpturen maken van 2D-video's

- Apple zal naar verluidt al in maart een veel goedkopere iPhone uitbrengen

- Microrobots die meerdere soorten zwermvormen kunnen vormen

 Vijf inwoners winnen bod om Schots eiland te kopen
Vijf inwoners winnen bod om Schots eiland te kopen- Bewolkt met kans op straling:NASA bestudeert gesimuleerde straling
- Veranderingen veroorzaakt door verergerende bosbranden in Californische bossen zullen eeuwen duren
- Wat is het verschil tussen een kasteel en een paleis?
- Coevolution: definitie, soorten en voorbeelden
- Nikkelschuim-ondersteunde koolstof-nanobuis-elektrode biedt verbeterde prestaties voor lichtgewicht lithiumbatterijen
- Een record glad scheren:Asteroid 2020 VT4 net afgeroomd door de aarde
- Opbreken (eiwitcomplexen) is moeilijk te doen, maar nieuwe studie laat zien hoe
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
