Wetenschap
Microrobots die meerdere soorten zwermvormen kunnen vormen
Een team van onderzoekers van het Harbin Institute of Technology in China en de Michigan State University in de VS heeft een manier ontwikkeld om zwermende microrobots te besturen die zich in meerdere soorten vormen kunnen vormen. In hun artikel gepubliceerd in het tijdschrift Wetenschap Robotica , de groep beschrijft hun kleine robots, wat ze kunnen doen, en mogelijke toepassingen ervan.
In de afgelopen decennia is wetenschappers en ingenieurs hebben gewerkt aan de ontwikkeling van robots die zo klein zijn dat ze in een levend lichaam kunnen zwemmen. Men gelooft dat op een dag, dergelijke robots zullen medicijnen kunnen afleveren aan doelen in het lichaam, of misschien in het lichaam blijven, werken in combinatie met het immuunsysteem om ziekten te voorkomen. In deze nieuwe poging de onderzoekers hebben nog een stap in die richting gezet door een manier te ontwikkelen om een zwerm kleine robots te besturen die ze in meerdere soorten vormen configureert.
De onderzoekers merken op dat tot nu toe, ingenieurs hebben kleine robots ontwikkeld die in zwermen vormen en werken, maar alleen in een enkele vorm, waardoor hun bruikbaarheid wordt beperkt. De onderzoekers die in China werken, melden dat hun kleine robots in staat waren om vier verschillende zwermvormen te vormen:vloeibaar, lintje, ketting en draaikolk. En elk van hen zou op aanvraag kunnen worden gevormd.
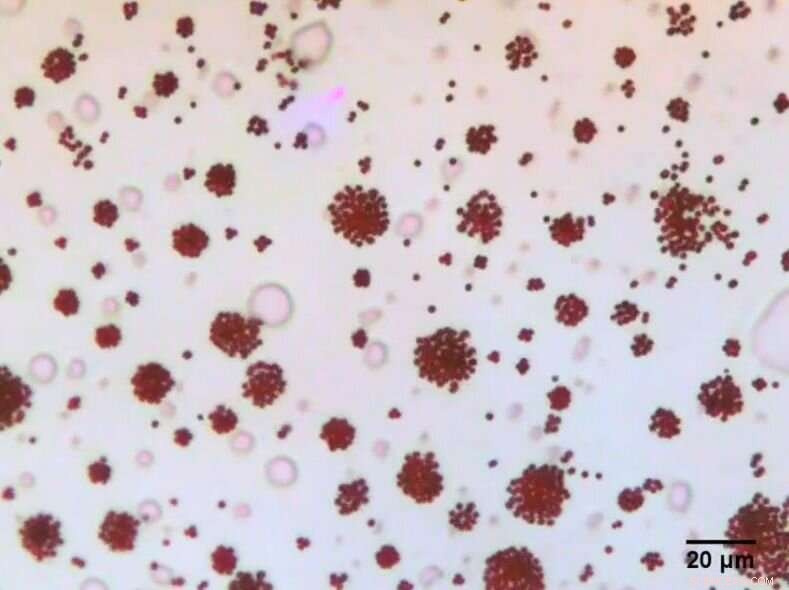
De robots in de experimenten waren eigenlijk slechts enkele hematietkorrels - ze werden in een vloeistof gesuspendeerd en gemanipuleerd met behulp van gespecialiseerde magneten. Door de frequentie en richting van het magnetische veld te regelen, de onderzoekers waren in staat om elke robot te laten draaien, rollen, oscilleren en tuimelen onafhankelijk. Toen het magnetische veld voor een hele groep robots werd gecontroleerd, het resultaat was een beheersbare zwerm.
De onderzoekers wijzen erop dat om van het ene lichaamsdeel naar het andere te komen, een zwerm zou zichzelf in verschillende configuraties moeten kunnen vormen. Bewegen door een orgaan zoals de maag, bijvoorbeeld, kan een zwerm nodig hebben om gewoon als een massa te bewegen. Door een kanaal bewegen, anderzijds, zou vormen als een ketting nodig hebben, slang of worm. En voor het verplaatsen van lading in het lichaam zou een zwerm nodig zijn om samen te komen in een vorm zoals een vortex voor een collectief ruim.
© 2019 Wetenschap X Netwerk
 Bacteriefabrieken gebruikt om potentiële nieuwe malariamedicijnen te ontdekken
Bacteriefabrieken gebruikt om potentiële nieuwe malariamedicijnen te ontdekken- Het lichaam vertrouwt op duizenden suiker-eiwitcomplexen om gezond te blijven
- Hoeveel neutronen heeft waterstof?
- Kan ik die chemicaliën mengen? Daar is een app voor!
- Neutronen bieden de eerste blik op een levend celmembraan op nanoschaal
- Ice Caps Smeltende feiten
- Verslechterende kloven en breuken gespot op twee van de belangrijkste gletsjers van Antarctica
- NASA-satelliet identificeerde een minder georganiseerde Caribische tropische storm Karen
- De tropen breiden zich uit, en klimaatverandering is de belangrijkste boosdoener
- Chemisch kantelpunt van magma bepaalt explosief potentieel van vulkanen
Hoofdlijnen
- Een universele voedsel- en alarmsignaal gevonden in zoogdierbloed
- Houden mannelijke vissen ze liever groot en kleurrijk?
- VS keuren herstelplan voor Mexicaanse wolven goed
- Commensalisme: definitie, types, feiten en voorbeelden
- Studie waarschuwt dat slangenschimmelziekte een wereldwijde bedreiging kan zijn
- Waarom bevatten de testen veel glad ER?
- Wat levert elektronen voor de lichtreacties?
- Stadia van een typische celcyclus
- Wat doet ethanol in een DNA-extractie?
- Team behaalt nieuwe efficiëntiedoorbraak voor opkomend materiaal voor zonnecellen

- Californische wetgevers komen met wetsvoorstel om de sterkste netneutraliteitsbescherming in de VS in te stellen

- Wiskunde gebruiken om muzieknoten naadloos te laten samenvloeien

- De nepnieuwsdetector
- Einde van de weg:Dyson stopt met race om elektrische auto's te maken


 India verliest contact met maanlander (update)
India verliest contact met maanlander (update)- Het effect van temperatuur op de ademhaling van erwten
- Grad-studenten zullen toekomstige professoren zijn, maar leren ze hoe ze effectief les kunnen geven?
- Is de gezondheidszorg de nieuwe maakindustrie als het gaat om goede banen?
- Hoe maak je een 3-D Bohr Model
- Wiskunde werpt licht op hoe levende cellen denken
- Studie werpt nieuw licht op waarom batterijen kapot gaan
- In een handomdraai van isolator naar geleider
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
