Wetenschap
Team ontwikkelt robothand die eieren kan hanteren en papier kan snijden met een schaar
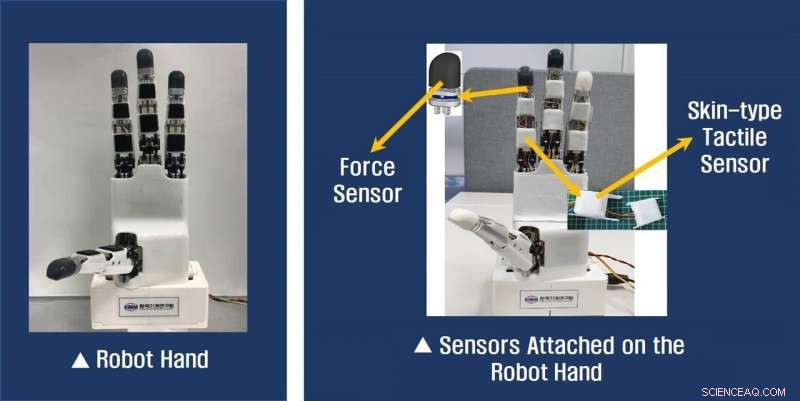
Tactiele Sensor-geïntegreerde Robot Hand. Krediet:Korea Institute of Machinery and Materials (KIMM)
Het Korea Institute of Machinery &Materials (President Chunhong Park; hierna "KIMM") heeft een robothand ontwikkeld die in staat is om verschillende objecten en gereedschappen in het dagelijks leven te hanteren, zoals een ei vasthouden en papier knippen met een schaar. De hand kan eenvoudig op verschillende robotarmen worden gemonteerd, en biedt 's werelds sterkste grijpkracht tegen zijn eigen gewicht. De verwachting is dat het gebruik van robothanden zal worden uitgebreid naar industriële locaties en het dagelijks leven.
Het team onder leiding van Dr. Hyunmin Do, hoofdonderzoeker bij de afdeling Robotica en Mechatronica onder de Advanced Manufacturing Systems Research Division van KIMM, ontwikkelde een robothand die objecten op dezelfde manier kan hanteren als menselijke handen door de structuur en de beweging van menselijke vingers na te bootsen.
De robothand bestaat uit vier vingers en 16 gewrichten. Er worden in totaal 12 motoren gebruikt om elke vinger en elk gewricht onafhankelijk te bewegen.
Het onderzoeksteam ontwikkelde een uniek mechanisme om beweging in kleine ruimtes met een hoge mate van vrijheid te ondersteunen, vergelijkbaar met de beweging van een menselijke hand. Ze slaagden erin de aandrijfeenheid die verantwoordelijk is voor vingerbewegingen te moduleren door deze in de handpalm in te bedden. De robothand kan eenvoudig op verschillende robotarmen worden gemonteerd.
In aanvulling, de ontwikkelde robothand is lichter en sterker dan in de handel verkrijgbare robothanden. Het gewicht is minder dan 1 kg, maar het laadvermogen is meer dan 3 kg.
Het onderzoeksteam ontwikkelde twee soorten krachtsensoren om tactiele detectie mogelijk te maken om contact met objecten te detecteren, en bevestigde ze aan de vingertoppen, vingers en de handpalm. De sensoren die aan de vingertoppen zijn bevestigd, zijn meerassige kracht-/koppelsensoren met een diameter van 15 mm en een gewicht van minder dan 5 g. Ze kunnen de grootte en richting van de kracht meten die bij de vingertop wordt gedetecteerd wanneer de robothand in contact komt met een object. De sensoren zijn de sleutel tot het beheersen van de grijpkracht.
Huidtype tactiele sensoren ontwikkeld door gezamenlijk onderzoek met Seoul National University werden ook bevestigd aan vingers en de handpalm. Deze sensoren meten de krachtverdeling bij het contactgebied wanneer de robothand een object aanraakt.
Tot nu toe ontwikkelde commerciële robothanden hebben beperkte toepassingen, omdat er geen gemodulariseerde producten zijn die zijn uitgerust met zowel de aandrijfeenheden die in het handpalmgebied zijn ingebed als de ingebouwde tactiele sensoren.
Dr. Hyunmin Do zei:"De robothand is ontwikkeld om verschillende objecten te hanteren, waaronder de gereedschappen die in het dagelijks leven worden gebruikt door de delicate beweging van een menselijke hand na te bootsen. Er wordt ook verwacht dat hij zal worden gebruikt als een onderzoeksplatform voor het bestuderen van het grijpalgoritme van robothand en manipulatie-intelligentie. "
 Van hout plastic maken
Van hout plastic maken- Het afstemmen van het oppervlak geeft variaties op metaalfolies
- Vanille maakt melkdranken zoeter
- Bewijsstuk A en andere echte misdaadshows kunnen misvattingen over forensische wetenschap aanwakkeren
- Bevordering van elektroreductie van stikstofmonoxide tot ammoniak via elektronenrijk Cu gemoduleerd door Ru-doping
- Wetenschappers verbeteren voorspelling van toenemend gevaar op Ecuadoraanse vulkaan
- Meer neerslag en de waterwonderen van Italiaanse heiligen
- Opinie:Trumps dreigement op toezeggingen over klimaatverandering zal Afrika hard treffen
- Hoe Shiners voor visaas te verhogen
- Loodvervuiling in poolijs toont economische impact van oorlogen en plagen voor de afgelopen 1 500 jaar
Hoofdlijnen
- Wat is de rol van de milt en het beenmerg in de bloedsomloop?
- Bijen gebruiken onzichtbare warmtepatronen om bloemen te kiezen
- Zoektocht naar nieuwe medicijnen kan worden geholpen door celontdekking
- Wat voor soort Allele slaat een generatie over?
- De levenscyclus van Gymnosperms
- Laat DNA de cellen weten wat eiwitten moeten maken?
- Vier klassen Macromoleculen die belangrijk zijn voor levende wezens
- Eenvoudig epitheelweefsel: definitie, structuur en voorbeelden
- Dikke eekhoorn steelt dure goederen die zijn achtergelaten voor bezorgers
- OpenAI Five wint een best-of-three, kijkt naar International volgende

- W3C- en WHATWG-overeenkomst:enkele versie van HTML, DOM-specificaties

- Amazon Prime Day wordt een fenomeen nu rivalen binnenspringen

- Prototype van een hoge temperatuur warmtepomp voor het terugwinnen van industriële restwarmte

- Boeing 737 MAX-vluchtcontrolesysteem sleutelfactor bij Lion Air-crash


 Fysische eigenschappen van stikstofgas
Fysische eigenschappen van stikstofgas - De gulden middenweg van zwarte gaten vinden
- Hoe Ramjets werken
- Nieuwe oplossing om de strijd met hoogslapers te beëindigen
- De lente smelt een pad door de bevroren Finse archipel
- Hoe u een eindtemperatuur berekent
- Marketingtrucs:houd je ogen open
- Grote wetenschappelijke tools bundelen om licht te werpen op flexibele eiwitten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
