Wetenschap
Gezamenlijke gelijktijdige lokalisatie- en kaarttechniek maakt gebruik van beschikbare Wi-Fi-netwerken
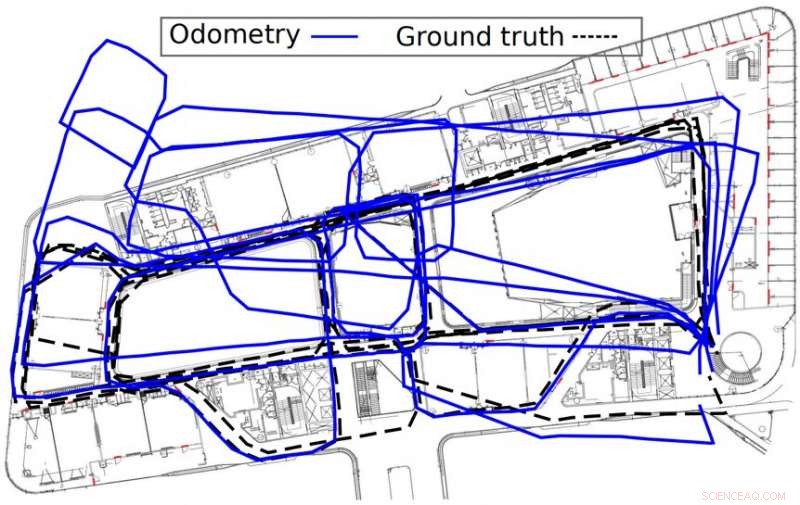
Figuur die laat zien hoe benaderingen van de grondwaarheid zich verhouden tot odometrietechnieken. Krediet:Liu et al.
In recente jaren, onderzoeksteams over de hele wereld hebben nieuwe methoden ontwikkeld voor simultane lokalisatie en mapping (SLAM). Deze technieken kunnen worden gebruikt om kaarten van een bepaalde omgeving in realtime te construeren of bij te werken, terwijl tegelijkertijd de locatie van een kunstmatige agent of robot binnen deze kaarten wordt gevolgd.
De meeste bestaande SLAM-benaderingen zijn sterk afhankelijk van het gebruik van op bereik gebaseerde of op zicht gebaseerde sensoren, zowel om de omgeving te voelen als de bewegingen van een robot. Deze sensoren, echter, kan erg duur zijn en vereist doorgaans aanzienlijke rekenkracht om goed te kunnen werken.
Zich bewust van deze beperkingen, onderzoekers van de Singapore University of Technology and Design, Southwest Universiteit voor Wetenschap en Technologie, de Universiteit van Moratuwa en de Nanyang Technological University hebben onlangs een nieuwe techniek ontwikkeld voor collaboratieve SLAM die wel afhankelijk is van op bereik gebaseerde of op zicht gebaseerde sensoren. Deze techniek, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, zou een effectievere robotnavigatie in onbekende binnenomgevingen mogelijk maken tegen een aanzienlijk lagere prijs dan de meeste eerder voorgestelde methoden.
"We wilden goedkope en weinig rekenkundige sensoren gebruiken als vervanging voor op bereik gebaseerde of visuele sensoren, "Chau Yuen, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Omdat moderne gebouwen doorgaans wifi-netwerkdekking hebben, ons doel is om dergelijke vrij beschikbare informatie te gebruiken om SLAM uit te voeren."
Om gebruik te maken van radiofuncties die in de meeste stedelijke omgevingen direct beschikbaar zijn, de onderzoekers ontwikkelden een aanpak voor gezamenlijke gelijktijdige lokalisatie en radiofingerprint mapping genaamd C-SLAM-RF. Hun techniek werkt door crowdsensing van wifi-metingen in grote binnenomgevingen en deze metingen vervolgens te gebruiken om kaarten te genereren of kunstmatige agenten te lokaliseren.
"Ons doel is om met de minste menselijke inspanning een radiokaart van de omgeving te genereren door gebruik te maken van ingebouwde detectiemogelijkheden van veelgebruikte smartphones, ' legde Yuen uit.
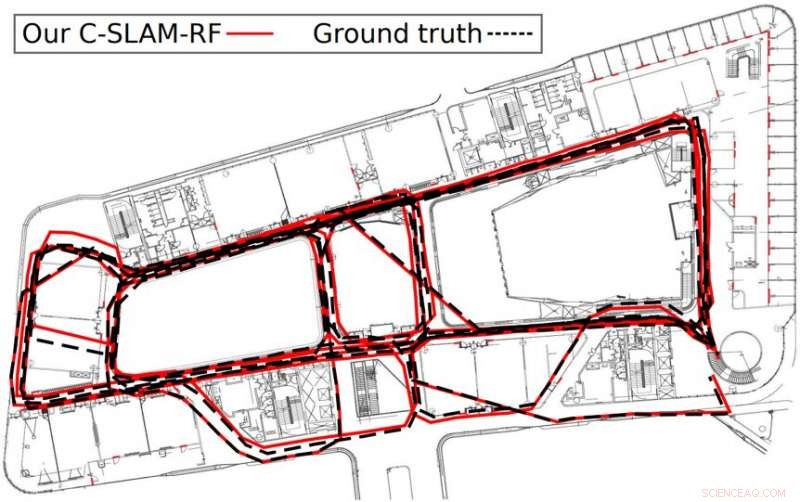
Figuur die laat zien hoe geschatte padbenaderingen zich verhouden tot de door de onderzoekers ontwikkelde SLAM-techniek. Krediet:Liu et al.
Het door Yuen en zijn collega's ontwikkelde systeem ontvangt informatie over de sterkte van het signaal afkomstig van reeds bestaande Wi-Fi-toegangspunten verspreid over een bepaalde omgeving, evenals van voetgangers gegist bestek (PDR) processen (d.w.z. berekeningen van iemands huidige positie) afgeleid van een smartphone. Vervolgens gebruikt het deze signalen om een kaart van de omgeving te bouwen zonder voorafgaande kennis van de omgeving of de distributie van de toegangspunten erin. De door de onderzoekers bedachte tool C-SLAM-RF kan ook bepalen of de robot is teruggekeerd naar een eerder bezochte locatie, bekend als "lussluiting, " door de gelijkenis tussen de radiovingerafdrukken van verschillende signalen te beoordelen.
"Bestaande SLAM-benaderingen gebruiken vaak speciale apparaten, bijvoorbeeld, visuele camera's of op het bereik gebaseerde LIDAR-sensoren, om de overeenkomst van waarnemingen te meten door scan-matching of feature-matching, die rekenkundig duur zijn, "U-Xuan Tan, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Onze oplossing maakt gebruik van de mogelijkheid om lokalisatie en mapping uit te voeren tegen lage kosten, alomtegenwoordige IoT-apparaten zoals smartphones, vanwege de groeiende populariteit van draadloze Wi-Fi-netwerken."
Yuen, Tan en hun collega's testten hun techniek in een binnenomgeving met een oppervlakte van 130 meter x 70 meter. Hun resultaten waren veelbelovend, omdat de prestaties van hun systeem die van verschillende andere bestaande technieken voor SLAM overtroffen, vaak met een aanzienlijke marge.
"We hebben onze aanpak geëvalueerd in een grootschalige omgeving en een positioneringsnauwkeurigheid van 0,6 meter is bereikt zonder enige voorkennis van de omgeving, "Ran Liu, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Deze nauwkeurigheid overtreft de state-of-the-art op vingerafdrukken gebaseerde lokalisatiebenadering, wat een moeizaam onderzoek van de omgeving vereist. De rekentijd die nodig is voor onze aanpak is onbeduidend in vergelijking met de op bereik gebaseerde of visuele SLAM."
In de toekomst, de aanpak voor collaboratieve SLAM die door dit team van onderzoekers is bedacht, kan helpen om robotnavigatie in onbekende omgevingen te verbeteren. In aanvulling, het feit dat het geen gebruik van dure sensoren vereist en afhankelijk is van bestaande Wi-Fi-hotspots, maakt het een meer haalbare oplossing voor grootschalige implementaties.
"We willen nu de mogelijkheid onderzoeken om verschillende radiosignalen te fuseren, bijvoorbeeld cellulair signaal, om de positioneringsnauwkeurigheid te verbeteren, "Yong Liang Guan, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplor. "Een ander plan is om de geproduceerde radiokaart te gebruiken voor lokalisatie. Een combinatie met andere sensoren, bijvoorbeeld laserafstandsmeters, om het in kaart brengen in grootschalige omgevingen te versnellen en te verbeteren, zal ook een van onze toekomstige onderzoeken zijn."
© 2020 Wetenschap X Netwerk
 Ontwikkeling van een 3D-deeltjesmodel voor afzonderlijke deeltjes in batterij-elektroden
Ontwikkeling van een 3D-deeltjesmodel voor afzonderlijke deeltjes in batterij-elektroden- Het verbinden van hoorhulpmoleculen met het oorbeen
- Studie onthult radicale rimpel bij vorming van complexe koolstofmoleculen in de ruimte
- Deconstructie van het superfood dat de honingbijhiërarchie bepaalt
- Hoe Pennies te maken Zet van koper in zilver in goud
- Hoe Olifanten slapen?
- Het rook naar zwavel:as valt in de buurt van vulkaan Hawaï
- Afvalwater bevat voedingsstoffen, energie en edele metalen - wetenschappers leren hoe ze deze kunnen terugwinnen
- Krachtig, lokale verhalen kunnen ons inspireren om actie te ondernemen tegen klimaatverandering
- Niet alle zeevissen eten plastic
Hoofdlijnen
- Het verschil tussen prokaryotische en eukaryotische genexpressie
- Darwins afschuwelijke mysterie oplossen:hoe bloeiende planten de wereld veroverden
- Wat is het verschil tussen erfelijke en milieudefecten?
- BigH1 - de belangrijkste histon voor mannelijke vruchtbaarheid
- Hoe zijn fotosynthese en cellulaire ademhaling gerelateerd
- Het idee testen dat milieu-uitdagingen de evolutie van grotere hersenen stimuleren
- Wat zijn de vier stikstofhoudende bases van DNA?
- Verloren Australische duiker zwom mijlen naar kust gestalkt door haai
- Vijf olifanten gedood door trein in India
- We namen een gok op de Premier League-weddenschappen en toonden aan dat voetbalweddenschappen een gezondheidswaarschuwing moeten bevatten

- Rapport:Amazon-rekeningen controleren? Iets soortgelijks zou binnenkort kunnen komen

- Japan omarmt cryptocurrencies ondanks grote diefstalgevallen

- Daken achteraf aanbrengen in de Rust Belt van Pennsylvania

- Winst Ford daalt door zwakke verkoop in China


 Hoe kosmische stralen een geheime leegte in de Grote Piramide onthulden
Hoe kosmische stralen een geheime leegte in de Grote Piramide onthulden - Nederlands-Chinese radiotelescoopantennes ontvouwen achter de maan
- Europa's eerste volledig elektrische telecomsatelliet
- nasa, NOAA-satellieten zien winterstormgekte maart naar het oosten
- Afbeelding:Siberische bosbranden gezien vanuit een baan om de aarde
- Studie onderzoekt hoe robots in de operatiekamer teamwerk beïnvloeden
- Een wetenschappelijk datingspel - biologen spelen RNA-eiwit matchmakers
- Verbetering van de risicobeoordeling van nanodeeltjes als levensmiddelenadditieven
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
