Wetenschap
Een IKEA meubelmontage-omgeving om robots te trainen in complexe manipulatietaken
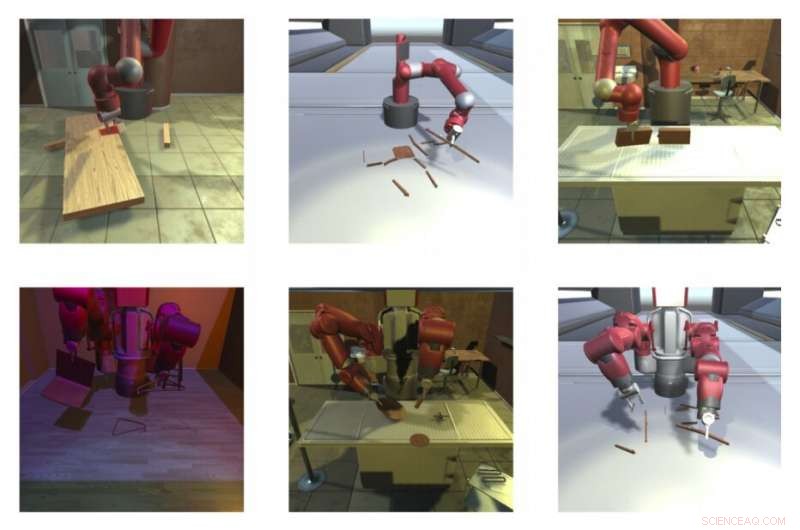
Screenshots van de IKEA meubelmontageomgeving. Krediet:Lee et al.
Om complexe dagelijkse taken uit te voeren, zoals het gebruik van apparatuur, koken of meubels maken, robots moeten hun acties kunnen plannen en objecten in hun omgeving kunnen manipuleren. Tot dusver, echter, robots leren ingewikkelde taken uit te voeren, zoals die waarvoor planning over een aanzienlijke periode vereist is, bleek nogal uitdagend, ook vanwege een gebrek aan betrouwbare gesimuleerde omgevingen om ze in te testen.
Met dit in gedachten, onderzoekers van de University of Southern Carolina hebben onlangs de IKEA meubelmontageomgeving ontwikkeld, een simulatieplatform waar onderzoekers kunstmatige intelligentie (AI)-agenten kunnen testen op complexe manipulatietaken. In de omgeving die ze ontwikkelden, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, agenten kunnen worden beoordeeld op een verscheidenheid aan manipulatietaken waarbij verschillende meubels worden gebouwd en gemanipuleerd.
"De omgeving is ontworpen om versterkend leren te bevorderen, van eenvoudige speelgoedtaken tot complexe taken die zowel langetermijnplanning als geavanceerde besturing op laag niveau vereisen, ’ schreven de onderzoekers in hun paper.
Het monteren van meubels kan zelfs voor mensen een uitdagende taak zijn, omdat het doorgaans zowel langetermijnplanning als geavanceerde manipulatievaardigheden vereist. De door de onderzoekers ontwikkelde omgeving, die vrij eenvoudig te gebruiken is, heeft een aantal interessante functies. Omdat het een enorme hoeveelheid synthetische gelabelde gegevens genereert, het kan worden gebruikt om computervisiemodellen te trainen voor een breed scala aan taken, inclusief schatting van de objectpositie, scène begrip, en nog veel meer, zonder dat er door mensen geannoteerde gegevens nodig zijn.
In aanvulling, de omgeving kan dienen als maatstaf voor machinale leermethoden die zijn ontworpen voor meubelmontage of andere manipulatietaken op lange termijn, hun controle- en planningscapaciteiten te verbeteren. interessant, de door het platform geproduceerde visuele en interactieve gegevens kunnen ook worden gebruikt om domeinspecifieke kennis op te doen voor andere toepassingen, zoals intuïtieve natuurkundige modellen.
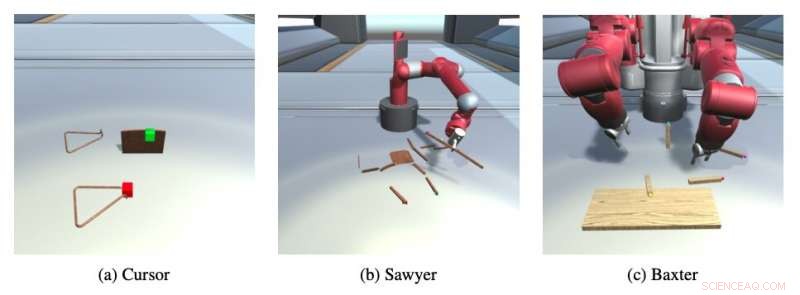
De drie robots die momenteel door het platform worden ondersteund. Krediet:Lee et al.
De IKEA meubelmontageomgeving ondersteunt meer dan 80 meubelmodellen en kan worden aangepast met achtergrondafbeeldingen, verlichting en texturen. Het zou uiteindelijk kunnen worden gezien als een testbed voor machine learning-technieken die zijn ontworpen om robots geavanceerde vaardigheden voor objectmanipulatie te geven.
Tot dusver, de omgeving kan worden gebruikt om drie robots van verschillende vormen en maten te trainen of te testen, genaamd cursor, Sawyer en Baxter. In de volgende update, echter, de onderzoekers zijn ook van plan ondersteuning voor Fetch toe te voegen, UR, Jaco en andere populaire robots.
In de toekomst, deze aanpasbare omgeving zou nieuwe mogelijkheden kunnen bieden voor het trainen en evalueren van tal van machine learning-technieken voor robotica-toepassingen. Ondertussen, de onderzoekers zijn van plan om het platform te updaten en enkele van zijn functies te verbeteren.
Bijvoorbeeld, ze willen ondersteuning voor 3D-bewegingsapparaten toevoegen, waarmee gebruikers robots op afstand kunnen bedienen en demonstratievideo's kunnen maken met behulp van een VR-controller of 3D-muis. Deze demonstratievideo's kunnen vervolgens worden gebruikt om machinale leermodellen te trainen, met behulp van een strategie die bekend staat als imitatie leren.
In toekomstige versies van het platform, gebruikers kunnen ook worden toegestaan om robots te begeleiden via gesproken instructies, en misschien zelfs meerdere agenten tegelijk kunnen trainen. Bovendien, robots kunnen uiteindelijk worden getraind in het gebruik van specifieke tools, zoals schroevendraaiers en hamers.
© 2019 Wetenschap X Netwerk
 Wetenschappers ontwikkelen een chemokatalytische benadering voor een-potreactie van cellulose-ethanol
Wetenschappers ontwikkelen een chemokatalytische benadering voor een-potreactie van cellulose-ethanol- Wat is gibberellinezuur?
- Op woestijnkever geïnspireerde magnetische demulgator ontwikkeld met uitstekende olie-in-water-emulsiescheidingsprestaties
- Hoe ethyleengas te maken
- Hiërarchisch mesoporeuze titaniumdioxidematerialen voor energie- en milieutoepassingen
- Wereldwijde uitstoot van fossiele brandstoffen van koolwaterstoffen wordt onderschat
- Ongelijke mate van zeespiegelstijging gekoppeld aan klimaatverandering
- Onderzoek naar luchtkwaliteit kan de volksgezondheid in West-Afrika verbeteren
- Warmste mei ooit, Siberië 10C heter
- Hawaï-vulkaan genereert giftige gaspluim genaamd laze
Hoofdlijnen
- Groene Brexit laten werken voor landbouw en milieu
- Darwins afschuwelijke mysterie oplossen:hoe bloeiende planten de wereld veroverden
- Dierenartsen voeren de eerste bekende hersenoperatie uit om hydrocephalus bij pelsrobben te behandelen
- Team onthult regels voor het maken van ribben
- Eetbaar diercelproject met Candy
- Celmodellen voor wetenschapsprojecten
- Opwarming van het klimaat zou de bacteriële impact op Chesapeake Bay-schelpdieren kunnen vergroten, recreatie
- Biogeografie: definitie, theorie, bewijs & voorbeelden
- Een rol van lipiden bij celdeling
- Amazon trekt stekker uit Chinese retailactiviteiten:rapport

- Met Googles Art Transfer kunnen gebruikers foto's transformeren alsof ze door beroemde kunstenaars zijn geschilderd

- Amazon en Casino gaan boodschappen bezorgen in Frankrijk

- Waarom gokken op smartphones in opkomst is onder Afrikaanse millennials

- EU stopt spookvluchten in strijd tegen coronavirus


 Amerikaanse burgers kunnen nu modellen van 3D-geprinte vuurwapens online publiceren. Wat betekent het voor ons?
Amerikaanse burgers kunnen nu modellen van 3D-geprinte vuurwapens online publiceren. Wat betekent het voor ons?- Hoe Oklahoma Water Turtles
- Hoe Conductivity
- Hoe strijden tegen het klimaatakkoord de strijd tegen hiv/aids zou belemmeren?
- Laatste grens:Rusland ontwikkelt wasmachine voor ruimte
- Aan banken gelieerde fondsen dragen bij aan de financiering van hun moederbank in tijden van crisis
- Afbeelding:Victoriawatervallen
- SpaceX klaar om astronauten voor het eerst de ruimte in te lanceren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
