Wetenschap
RoboBee aangedreven door zachte spieren
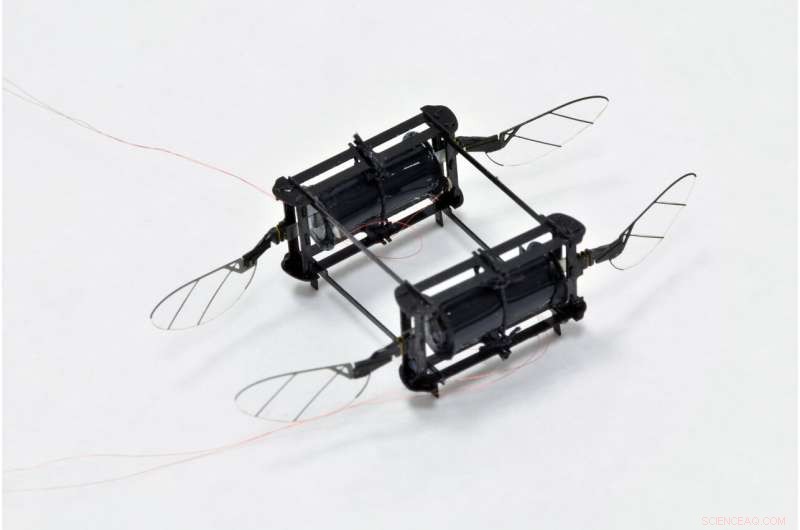
Een viervleugelige, model met twee actuatoren zou kunnen vliegen in een rommelige omgeving, het overwinnen van meerdere botsingen in een enkele vlucht. Krediet:Harvard Microrobotics Lab
De aanblik van een RoboBee die naar een muur raast of tegen een glazen doos botst, kan ooit paniek hebben veroorzaakt bij de onderzoekers in het Harvard Microrobotics Laboratory van de Harvard John A. Paulson School of Engineering and Applied Science (SEAS), Maar niet meer.
Onderzoekers van SEAS en het Wyss Institute for Biologically Inspired Engineering hebben een veerkrachtige RoboBee ontwikkeld die wordt aangedreven door zachte kunstmatige spieren die tegen muren kunnen botsen, op de grond vallen, en botsen met andere RoboBees zonder beschadigd te raken. Het is de eerste microrobot die wordt aangedreven door zachte actuatoren om een gecontroleerde vlucht te bereiken.
"Er is een grote druk geweest op het gebied van microrobotica om mobiele robots te maken van zachte actuatoren omdat ze zo veerkrachtig zijn, " zei Yufeng Chen, een voormalig afgestudeerde student en postdoctoraal fellow bij SEAS en eerste auteur van het papier. "Echter, veel mensen in het veld waren sceptisch dat ze zouden kunnen worden gebruikt voor vliegende robots, omdat de vermogensdichtheid van die actuatoren gewoon niet hoog genoeg was en ze notoir moeilijk te besturen zijn. Onze actuator heeft een voldoende hoge vermogensdichtheid en bestuurbaarheid om een zweefvlucht te bereiken."
Het onderzoek is gepubliceerd in Natuur .
Om het probleem van de vermogensdichtheid op te lossen, de onderzoekers bouwden voort op de elektrisch aangedreven zachte actuatoren die zijn ontwikkeld in het laboratorium van David Clarke, de Extended Tarr Family Professor of Materials. Deze zachte aandrijvingen zijn gemaakt van diëlektrische elastomeren, zachte materialen met goede isolerende eigenschappen, die vervormen wanneer een elektrisch veld wordt aangelegd.
Door de geleidbaarheid van de elektrode te verbeteren, konden de onderzoekers de actuator op 500 Hertz bedienen, vergelijkbaar met de starre actuatoren die eerder in vergelijkbare robots werden gebruikt.
Een andere uitdaging bij het omgaan met zachte actuatoren is dat het systeem de neiging heeft om te knikken en instabiel te worden. Om deze uitdaging op te lossen, de onderzoekers bouwden een lichtgewicht casco met een stuk verticale beperkende draad om te voorkomen dat de actuator knikt.
De zachte actuatoren kunnen eenvoudig worden gemonteerd en vervangen in deze kleinschalige robots. Om verschillende vliegmogelijkheden te demonstreren, de onderzoekers bouwden verschillende modellen van de soft-powered RoboBee. Een model met twee vleugels kon vanaf de grond opstijgen, maar had geen extra controle. Een viervleugelige, model met twee actuatoren zou kunnen vliegen in een rommelige omgeving, het overwinnen van meerdere botsingen in een enkele vlucht.
“Een voordeel van kleinschaligheid, robots met een lage massa is hun veerkracht tegen externe invloeden, " zei Elizabeth Farrell Helbling, een voormalig afgestudeerde student aan SEAS en een co-auteur op het papier. "De zachte actuator biedt een bijkomend voordeel omdat hij de impact beter kan absorberen dan traditionele activeringsstrategieën. Dit zou van pas komen bij mogelijke toepassingen zoals door puin vliegen voor opsporings- en reddingsmissies."
Een achtvleugelige, vier-actuatormodel demonstreerde gecontroleerde zweefvlucht, de eerste voor een zacht aangedreven vliegende microrobot.
Volgende, de onderzoekers willen de efficiëntie van de soft-powered robot verhogen, die nog steeds ver achterloopt op meer traditionele vliegende robots.
"Zachte actuatoren met spierachtige eigenschappen en elektrische activering vormen een grote uitdaging in robotica, " zegt Robert Wood, Charles River hoogleraar engineering en toegepaste wetenschappen in SEAS, kernfaculteitslid van het Wyss Institute for Biologically Inspired Engineering en senior auteur van het artikel. "Als we hoogwaardige kunstmatige spieren zouden kunnen ontwikkelen, the sky is the limit voor wat voor robots we zouden kunnen bouwen."
 Hittebestendige enzymen zouden meer kosteneffectieve medicijnen kunnen produceren
Hittebestendige enzymen zouden meer kosteneffectieve medicijnen kunnen produceren- Nieuwe inzichten in het faalmechanisme van lithium-ionbatterijen
- Elektronenkristallografie bleek net zo goed te werken als röntgenkristallografie alleen op kleinere kristallen
- Remt of bevordert zink de groei van nierstenen? We zullen, beide
- Groen methaan uit kunstmatige fotosynthese kan CO2 recyclen
Hoofdlijnen
- 3D-verpakking van DNA reguleert celidentiteit
- Biologen ontdekken tastzin van bacteriën
- Zeldzame aardkers kan binnenkort overal zijn,
- Dierlijke versus plantencellen: overeenkomsten en verschillen (met grafiek)
- Biologische experimenten op de gisting van gist
- Wat houdt de genetische continuïteit in?
Je kunt op veel manieren nadenken over genetische continuïteit. In zekere zin verwijst het naar de consistente replicatie van genetische informatie van een oudercel naar twee dochtercellen. Een ander perspec
- Ervaren dieren geluk?
- Wat doet ADP in de biologie?
- Sleutel tot betere asperges geïdentificeerd in evolutie van geslachtschromosomen
- Complex ontwerp van universele controller voor hybride drones automatiseren
- Het valoriseren van afvalwater kan de commerciële levensvatbaarheid van de productie van biomassa-olie verbeteren

- Dunne films voor efficiëntere zonnecellen
- Elliott dringt aan op veranderingen bij eBay

- BinaryGAN:een generatief vijandig netwerk met binaire neuronen

 Nanodeeltjes lokaliseren bloedvatplaques
Nanodeeltjes lokaliseren bloedvatplaques- Een kamerperimeter berekenen
- Rogues-galerij van stoffige sterrenstelsels onthult kinderdagverblijven van exoplaneten
- Hoe te converteren van Centistoke naar Centipoise
- Astronomen hebben mogelijk een geringde planeet rond Proxima Centauri . afgebeeld
- Een gemakkelijkere manier om vegetarisch te worden:vitamine B12 kan worden geproduceerd tijdens deegfermentatie
- Rationalisatie van fonondispersie:een efficiënte en nauwkeurige voorspelling van de thermische geleidbaarheid van het rooster
- Groen cement een stap dichter bij een game-changer voor bouwemissies
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
