Wetenschap
Het ontwerpen van trajecten voor onbemande luchtvaartuigen voor het minimaliseren van energie
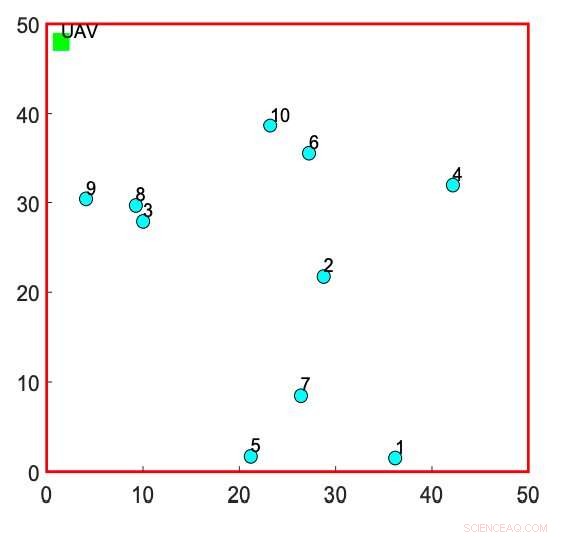
Afbeelding van een tweedimensionaal Cartesiaans coördinatensysteem, waar de UAV zich bij het grondstation bevindt en de GU's zich in het beschouwde gebied bevinden. Krediet:Tran et al.
Een team van onderzoekers van de Universiteit van Luxemburg en de Ontario Tech University hebben onlangs een nieuwe benadering voorgesteld voor het ontwerpen van trajecten voor energie-efficiënte draadloze communicatie met onbemande luchtvaartuigen (UAV). hun papier, voorgepubliceerd op arXiv, richt zich specifiek op gevallen waarin een UAV fungeert als een vliegend basisstation (BS) om grondgebruikers (GS's) te bedienen binnen een aantal vooraf bepaalde latentiebeperkingen.
"Ons doel is om het UAV-traject te ontwerpen om het totale energieverbruik te minimaliseren en tegelijkertijd te voldoen aan de RT-vereiste en het energiebudget, wat wordt bereikt door het gezamenlijk optimaliseren van het traject en de UAV-snelheden langs daaropvolgende hops, ’ schreven de onderzoekers in hun paper.
Het optimaliseren van het traject van een UAV en zijn snelheden samen kan enigszins moeilijk te bereiken zijn. Om dit te doen, de onderzoekers ontwikkelden een aanpak die twee opeenvolgende stappen uitvoert.
Hun aanpak omvat het gebruik van twee verschillende algoritmen, een heuristisch zoeken en een algoritme voor dynamisch programmeren (DP). Heuristische zoekmethoden werken door alle beschikbare informatie bij elke stap te evalueren en te beslissen welk pad te volgen door beschikbare rangschikkingsopties.
Dynamisch programmeren, anderzijds, is een aanpak voor het oplossen van problemen met overlappende 'deelproblemen'. Het werkt door individuele deelproblemen slechts één keer aan te pakken en de resultaten van deze analyses op te slaan, om ze opnieuw te gebruiken als hetzelfde subprobleem zich in de toekomst voordoet.
De onderzoekers gebruikten hun heuristische zoek- en dynamische programmeeralgoritmen om een haalbare reeks trajecten voor UAV's te bereiken die de latentiebeperkingen van de grondgebruiker niet schenden. De taak om deze trajecten te vinden wordt opgelost alsof het een zogenaamd handelsreizigersprobleem met tijdvensters (TSPTW) is. TSPTW is een algoritmisch probleem dat wordt gebruikt in de informatica en dat inhoudt dat een verkoper een pad met minimale kosten moet vinden dat precies één keer binnen een bepaald tijdvenster wil reizen en elk van een reeks steden wil bezoeken.
De door de algoritmen gesuggereerde trajecten werden vervolgens vergeleken met de trajecten die werden bereikt met behulp van uitgebreide zoektechnieken en bij het benaderen van de taak als het handelsreizigerprobleem (TSP); een algoritmisch probleem waarbij men de optimale routes moet bedenken voor een verkoper die een specifieke reeks steden wil bezoeken zonder specifieke tijdsvereisten.
"Hoewel het uitgebreide algoritme de beste prestaties levert tegen hoge rekenkosten, het heuristische algoritme vertoont slechtere prestaties met een lage complexiteit, " verklaarden de onderzoekers in hun paper. "Als gevolg hiervan, de DP wordt voorgesteld als een praktische afweging tussen de uitputtende en heuristische algoritmen."
Naast de twee algoritmen voor het vinden van optimale UAV-trajecten, de onderzoekers stelden ook een techniek voor om energie te minimaliseren. Deze methode werkt door gezamenlijk de snelheden van de UAV en de daaropvolgende hops te optimaliseren.
Toen de onderzoekers hun algoritmen evalueerden, ontdekten ze dat ze zeer effectief zijn, beter presteren dan bestaande state-of-the-art technieken, zowel op het gebied van energieverbruik als uitvalprestaties. In de toekomst, de nieuwe aanpak die ze voorstelden, zou kunnen helpen bij het ontwerpen van betere trajecten voor energieminimalisatie in toepassingen die gebruikmaken van UAV-compatibele draadloze communicatie met latentiebeperkingen. In aanvulling, hun werk zou de weg kunnen banen voor toekomstige studies gericht op het ontwikkelen van nieuwe tools om de prestaties van UAV-communicatienetwerken te verbeteren.
© 2019 Wetenschap X Netwerk
 Reinigen zonder te schrobben en chemicaliën te gebruiken. Wetenschappers ontwikkelen zelfreinigend aluminium oppervlak
Reinigen zonder te schrobben en chemicaliën te gebruiken. Wetenschappers ontwikkelen zelfreinigend aluminium oppervlak- Science Project: Welke merken granen blijven het langst knap?
- Grote vooruitgang in detectie van nanoporiën van peptiden en eiwitten
- Nieuwe technologie kan goedkopere, sneller voedsel testen
- Een lasergestuurde programmeerbare contactloze transferdruktechniek
- Tundra Biomes & Abiotic Factors
- Onderzoek toont aan dat beschermde tropische bossen worden bedreigd door de overvloed aan aangrenzende oliepalmplantages
- Pre-Columbus klimaatverandering heeft mogelijk geleid tot afname van de Amazone-bevolking
- Gebruikten microben om giftig elektronisch afval op te ruimen - hier is hoe
- Klimaatverandering kan meer sediment en vervuiling opleveren voor de San Francisco Bay-Delta
Hoofdlijnen
- Gespecialiseerde cellen: definitie, soorten en voorbeelden
- Onderwaterkwekerijen helpen de mediterrane visbestanden nieuw leven in te blazen
- Hoe komt glycolyse voor?
- 'S Werelds oudste bevroren sperma werkt prima
- Wat kan glycolyse stoppen?
- Honderden dode zeeschildpadden gevonden drijvend voor El Salvador
- Japanse wetenschappers kweken medicijnen in kippeneieren
- Hoe maak je een 3-D DNA-model voor High School Biology
- Een 3D-model voor celbiologische projecten bouwen Mitochondria en chloroplast
- Rollen van webanalysebedrijven bij nieuwsproductie

- Internettoegang via mobiele telefoons begint voor alle Cubanen

- Nieuwe robot doet superieur werk bloedafname

- Facebook-regels in één oogopslag:wat is verboden, precies?

- Onderzoekers stellen methode voor om gebruikerservaring en cloudkosten in evenwicht te brengen


 Deze witte verf houdt oppervlakken koeler dan de omgeving, zelfs in direct zonlicht
Deze witte verf houdt oppervlakken koeler dan de omgeving, zelfs in direct zonlicht- Gamma-ray binaire HESS J0632+057 bevat een pulsar, studie suggereert:
- Oesters sluiten hun schelpen als reactie op laagfrequente geluiden
- Met de hand tekenen bevordert het begrip van algebraïsche formules
- Ontdekking van de Mitochondria
- Nieuwe dual-propeller drone kan twee keer zo lang vliegen
- 10 geweldige dingen die de hersenen van mensen hebben gedaan
- Nieuwe techniek controleert de afmetingen van gouden nanostaafjes tijdens de productie op grote schaal
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
