Wetenschap
Parasitic Body:een virtual reality-systeem om de verzameling visuele feedback van robotarmen te bestuderen
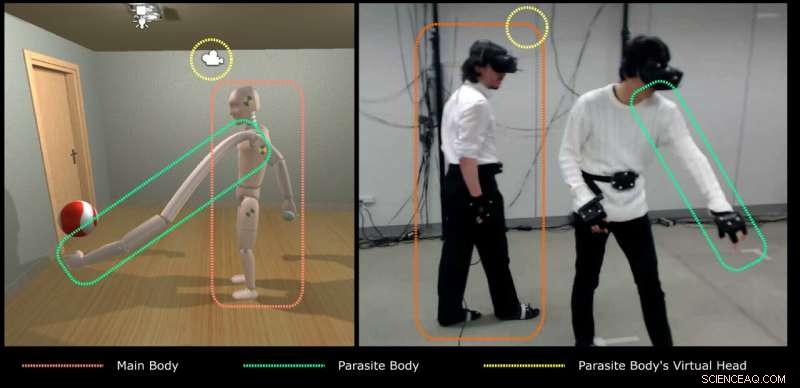
Het parasitaire lichaam in twee contexten. Aan je linker kant, het VR-perspectief. Aan de rechterkant, de echte ruimte met beide deelnemers. De deelnemer aan de linkerkant (aangegeven in rood) bestuurt het hoofdgedeelte. De deelnemer aan de rechterkant (aangegeven in groen) bestuurt de parasitaire ledemaat. De gele cirkel geeft in beide contexten de camerapositie aan. Krediet:Takizawa et al.
Recente ontwikkelingen in robotica hebben de ontwikkeling mogelijk gemaakt van systemen om mensen te helpen bij verschillende taken. Een type robotsysteem dat de afgelopen jaren aanzienlijk aan populariteit heeft gewonnen, zijn draagbare robotarmen die op afstand worden bediend door een derde partij.
Terwijl u gebruikers helpt, deze armen moeten visuele feedback verzamelen en delen met de externe operator. Deze feedback kan op verschillende manieren worden verzameld, de meest voorkomende is het plaatsen van een camera op de gebruiker die de robotarm 'host', ook wel main body operator (MBO) genoemd. Deze specifieke benadering voor het verzamelen van visuele gegevens, echter, kan enigszins beperkend zijn, omdat het sterk afhankelijk is van de bewegingen van de gebruiker die het systeem draagt.
Met deze beperking in het achterhoofd, onderzoekers van de Keio University, RIKEN AIP en de Universiteit van Tokyo hebben onlangs een virtual reality (VR)-systeem ontwikkeld om het concept van "body editing, " wat het gebruik van draagbare robotledematen inhoudt om mensen te helpen bij dagelijkse taken. Hun onderzoek werd gefinancierd door het Exploratory Research for Advanced Technology (ERATO) -programma van het Japan Science and Technology Agency (JST).
"Het overkoepelende doel van ons recente werk was om lichaamsbewerking te bestuderen als onderdeel van onze onderzoeksgroep, ERATO JIZAI, "Adrien Verhulst, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Lichaamsbewerking, zoals het verlengen van het lichaam met draagbare ondersteunende robottechnologie, is een concept dat gemakkelijk te vinden is in sommige culturele gebieden, zoals in de manga-serie Parasyte , door Hitoshi Iwaaki. We dachten bij onszelf, 'Een kunstmatig wezen aan je hechten en je helpen is precies wat we zoeken, ' dus probeerden we het idee losjes te repliceren in VR."
Verhulst en zijn collega's wilden een zogenaamd 'shared body'-experiment uitvoeren. In plaats van een oplossing voor te stellen om de beperkingen van de huidige systemen voor het verzamelen van visuele feedback te overwinnen, ze wilden bestaande benaderingen vergelijken en evalueren.
Om dit te doen, ze ontwikkelden een VR-systeem dat optitrack-technologie gebruikt om het lichaam van een gebruiker te volgen en een op het hoofd gemonteerd display (HMD) om de richting van zowel de MBO's als de lichamen van de robotarm te zien. In hun krant de onderzoekers verwijzen naar de gebruiker van de robotarm als het 'hoofdlichaam' en naar de externe teleoperator als het 'parasitaire lichaam'.
"Het is logisch om te denken dat als het 'parasietenlichaam' aan het hoofdlichaam is bevestigd, dan wanneer het hoofdlichaam beweegt, de parasiet zal ziek worden, toch?' zei Verhulst. de vragen die we onszelf stelden zijn:Hoe moeten we de visuele feedback die door het lichaam wordt verzameld, aanpassen? Mocht het een derde visie zijn, zoals in videogames? Waar moet het dan worden geplaatst:boven het hoofdgedeelte, aan de kant, of liever dicht bij de actie? Misschien kunnen we dezelfde mening delen? Of een uitzicht afhankelijk van de beweging van beide mensen?"
Teams van verschillende bedrijven en instellingen hebben verschillende benaderingen gepresenteerd om visuele feedback van robotarmen te verzamelen. De meest prominente hiervan zijn het concept "gedeelde weergave", de third person view en de close-to-the-action view.
Zoals gesuggereerd door hun namen, de shared view-benadering verzamelt visuele feedback die overeenkomt met wat de gebruiker die de robotarm draagt, ziet; de derde persoon ziet wat een derde persoon zou zien als ze naast of achter de gebruiker zouden staan, en de close-to-the-action-weergave toont een close-up van de taak die wordt voltooid. De onderzoekers wilden onderzoeken of deze verschillende weergavemodi afhankelijk zouden moeten zijn van de beweging van het hoofdlichaam, het lichaam van de parasiet, of allebei.
Om deze vraag te onderzoeken, ze voerden een experiment uit op 16 menselijke gebruikers met behulp van het door hen ontwikkelde VR-systeem. Dit stelde hen in staat om interessante inzichten te verzamelen over verschillende benaderingen voor het verzamelen van visuele feedback. Niettemin, hun bevindingen zijn nog voorlopig, aangezien het aantal mensen dat aan hun onderzoek heeft deelgenomen beperkt is.
"Mensen moeten zich georiënteerd voelen in de richting van hun ledemaat om het te gebruiken. Probeer dit:als je een camera in een vreemde hoek voor je houdt, en je kunt jezelf alleen zien vanaf die camera, u zult meer moeite hebben om uw arm in een bepaalde richting te bewegen, "Verhulst legde uit. "Dit betekent dat elke keer dat het hoofdlichaam beweegt, het lichaam van de parasiet heroriënteert zich. interessant, we merkten geen scherp verschil in scores voor lichaamseigendom, wat betekent dat ongeacht het gezichtspunt, deelnemers voelden dat ze hun lichaam 'bezaten', en dat ze het onder controle hadden."
De observaties verzameld door Verhulst en zijn collega's suggereren dat gezichtspuntafhankelijkheid niet zo belangrijk is. Met andere woorden, of men visuele feedback verzamelt door een camera op de robotarm te plaatsen, op de schouder van de menselijke gebruiker, of tussen de twee, hij/zij kan nog steeds het juiste "lichaamseigendom" bereiken wanneer hij door de camera kijkt.
"De resultaten die we verzamelden waren zeer verrassend, "Verhulst voegde eraan toe. "We hebben ook geen noemenswaardige problemen geconstateerd op het gebied van werkdruk (d.w.z. fysieke belasting, mentale belasting, poging, tijd), die, opnieuw, geeft aan dat de camera-afhankelijkheid in dit opzicht niet uitmaakt. Echter, de prestaties van de deelnemers waren iets beter in situaties waarin het uitzicht afhangt van zowel het hoofdlichaam als de parasiet, erop wijzend dat voor maximale effectiviteit, het is misschien beter om de camera op de hoofdbehuizing te plaatsen, maar gemotoriseerd zijn om de beweging te volgen van de persoon die de robotarm bestuurt."
Het onderzoek dat door dit team van onderzoekers werd uitgevoerd, was specifiek gericht op de perspectiefafhankelijkheid van externe operators van robotarmen bij taken die betrekking hadden op het vinden en bereiken van objecten. In de toekomst, het VR-systeem dat ze ontwikkelden, zou ook kunnen worden gebruikt om benaderingen te bestuderen om visuele feedback te verzamelen over meer uitgebreide en realistische taken.
"De volgende stap is het creëren van een experimentele omgeving met meer realistische situaties en configuraties, "Ryo Takizawa, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Om samenwerkingsmethoden in collaboratief werk te verkennen, we denken aan het beperken van communicatiemethoden en het verbeteren van VR-modellen, enzovoort."
De onderzoekers besloten VR te gebruiken en een virtueel experiment uit te voeren omdat het een gemakkelijke en goedkope oplossing was waarvoor geen onderhoud van geavanceerde robotsystemen nodig was. Om de validiteit van hun bevindingen vast te stellen, echter, ze zullen hun resultaten uiteindelijk moeten vergelijken met die van een echte robotarm.
In hun toekomstige werk, Verhulst en zijn collega's zijn ook van plan een soortgelijk experiment uit te voeren waarbij deelnemers vooraf worden getraind in de taak die ze zullen voltooien, omdat ze denken dat dit tot andere resultaten zou leiden. In dit onderzoek, in feite, de gebruikers kregen geen voorafgaande training voordat ze hun VR-platform gebruikten.
"We moeten overwegen hoe we een trainingstaak of -programma kunnen ontwerpen in een door het lichaam bewerkte en gedeelde lichaamscontext, vooral wat betreft het gladstrijken, zo niet verbeteren, samenwerkende taken, "Katie Seaborn, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Ik heb het idee van gelijktijdige, synchroon met dezelfde beweging, die in verband is gebracht met verbeteringen in de coöperatieve prestaties in andere contexten. We vragen ons af of zo'n 'shared action'-strategie in dit geval zou werken, met twee mensen die een heel ongewoon lichaam delen in VR."
© 2019 Wetenschap X Netwerk
 Expert bespreekt voorgestelde terugdraaiing van belangrijke regelgeving inzake klimaatverandering
Expert bespreekt voorgestelde terugdraaiing van belangrijke regelgeving inzake klimaatverandering- Onderzoeker onderzoekt hoe we de wereldwijde voedselvoorziening veerkrachtiger kunnen maken
- Exponentiële groei berekenen
- Wat zijn de effecten van niet-biologisch afbreekbaar afval?
- Dodelijke hittegolven kunnen deze eeuw Zuid-Azië treffen:studie
Hoofdlijnen
- Differentiëren van RNA- en DNA-virussen
- Wat maakt clowns zo griezelig?
- Onze darmmicroben hebben circadiane ritmes,
- Verplaatste haviken gedijen goed in Hispaniola
- Bio-ingenieurs ontdekken mechanisme dat krachtpatsers van cellen reguleert
- Meelkracht om voedselzekerheid te vergroten
- Wat zijn de belangrijkste functies van Cilia & Flagella?
- Het geheim van de winterslaap van schildpadden is de billenademhaling
- Wetenschappers onthullen superbugs-artillerie
- Amazon-muziekservice overtreft 55 miljoen abonnees

- Dit is hoe het advertentieweergavesysteem van Facebook de politieke kloof in de VS nog groter maakt

- Apple-aandelen slippen door zorgen over impact coronavirus

- Microsoft en Amazon laten zien dat Cortana en Alexa met elkaar kunnen praten, in ieder geval op het podium van Build-conferentie

- Code War:laatste digitale strijd van Myanmar eindigt


 De industrie smeren, de natuurlijke manier
De industrie smeren, de natuurlijke manier- Ultrasnel en gekoppeld:atoomtrillingen in het kwantummateriaal boornitride
- Nile Delta Facts
- Natuurkundigen blijven slimme composieten voor biomedische sensoren verbeteren
- Draaiende elektronen kunnen leiden tot nieuwe elektronica
- Symmetrische splitsing van disulfiden is snel en biocompatibel
- Nieuw inzicht in hoe stamcellen interageren met borstkankercellen
- Hoe Enceladus zijn strepen kreeg
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
