Wetenschap
Ingenieurs demonstreren belangrijke stap in robotische demontage
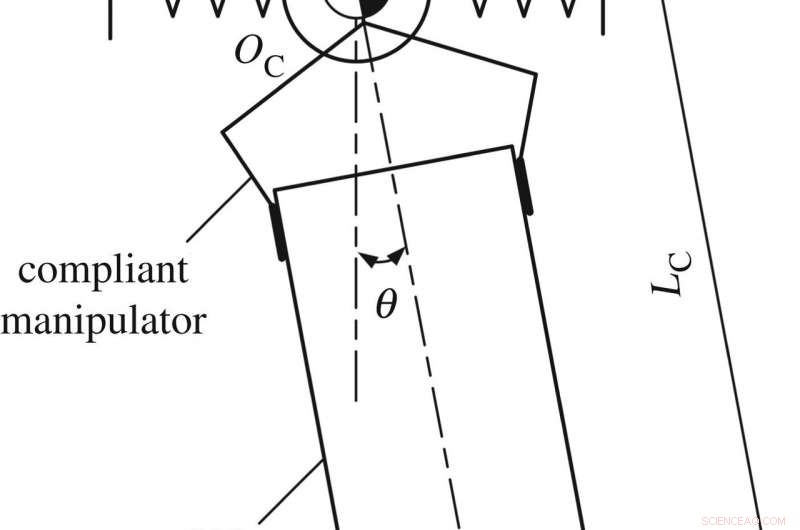
Definitie van coördinatenframe. Credit: Royal Society Open Science (2019). DOI:10.1098/rsos.190476
Ingenieurs van de Universiteit van Birmingham hebben met succes een robotsysteem ontworpen dat een belangrijke taak kan vervullen bij het demonteren van onderdelen.
Het onderzoek is een belangrijke stap vooruit voor fabrikanten die op zoek zijn naar efficiëntere manieren om producten te bouwen uit een combinatie van hergebruikte, gerepareerd en nieuwe onderdelen.
Bekend als remanufacturing, dit proces wordt steeds gebruikelijker in de productie en is aantrekkelijk omdat het slechts 10 procent van de energie en grondstoffen kan gebruiken die nodig zijn om het product helemaal opnieuw te bouwen. Het kan ook de CO2-uitstoot met meer dan 80 procent verminderen.
Een belangrijk onderdeel van het proces is de mogelijkheid om de 'kern' te demonteren, het geretourneerde product. Het is een uitdaging door de grote variatie binnen deze producten, met veel onbekenden in de grootte, vorm en staat van onderdelen.
De nieuwe studie, gepubliceerd in Royal Society Open Science , demonstreert een proces voor het verwijderen van pinnen uit gaten - componenten zoals deze komen zeer vaak voor in een grote verscheidenheid aan machines, zoals verbrandingsmotoren. Het onderzoek is het eerste dat deze operatie diepgaand onderzoekt en de belangrijkste parameters identificeert die nodig zijn om het proces te automatiseren.
Yongquan Zhang, van het Autonomous Remanufacturing Laboratory aan de Universiteit van Birmingham is hoofdauteur van het artikel. "De processen die momenteel worden gebruikt voor het automatiseren van demontage zijn vrij ad hoc, " legde hij uit. "We moeten robuuste systemen kunnen ontwerpen die de onzekerheden aankunnen die inherent zijn aan demontageprocessen - en om dat te doen, we hebben een beter fundamenteel begrip van demontage nodig."
"De resultaten van deze studie laten zien hoe dat fundamentele begrip kan worden gebruikt om robotsystemen te ontwerpen voor het betrouwbaar uitvoeren van één gemeenschappelijke demontagebewerking."
 Baanbrekende sensor om mensen met een bipolaire stoornis te helpen de lithiumspiegels te controleren
Baanbrekende sensor om mensen met een bipolaire stoornis te helpen de lithiumspiegels te controleren- Supercharged biomacromoleculen kunnen hun opnieuw geordende structuren behouden, bijvoorbeeld, door een vingertopaanraking
- High-throughput-methode voor het identificeren van nieuwe materialen
- Wetenschappers ontwikkelen efficiënte methode om zeer sterke materialen te maken voor flexibele elektronica
- Neutronenmicelmetingen geven inzicht in verbeterde medicijnafgifte
Hoofdlijnen
- Wat irriteert een chimpansee?
- Wetenschappers maken cellen die de tastzin mogelijk maken
- Onderzoekers brengen druggable genomische doelwitten in kaart in evoluerende malariaparasieten
- Haaien evolueerden vliegtuigachtige attributen om in habitats te passen
- Cell Analogy Project Ideas
- Chimpansees bleken arm- en monduitdrukkingen te gebruiken om afstand over te brengen
- EU stelt stemming over verlenging omstreden vergunning voor onkruidverdelger uit
- Kruising met Neanderthalers gaf mensen virusbescherming
- Vereiste chemische reacties om homeostase te handhaven
- Bedrijven formuleren leidende principes om zelfrijdende auto's veilig te laten zijn

- Wetenschappers zeggen dat buitenaardse wezens onze planeet kunnen hacken

- Beveiligingsfout bij Facebook - wat we weten

- Ford lanceert onderzoek naar de werkelijke uitstoot van zijn voertuigen

- Federale grand jury klaagt vrouw aan in Capital One-zaak


 Onderzoekers ontdekken dat de effecten van klimaatverandering tegen het midden van de eeuw kunnen versnellen
Onderzoekers ontdekken dat de effecten van klimaatverandering tegen het midden van de eeuw kunnen versnellen- Boswetenschappers ontwikkelen innovatieve materialen op houtbasis voor 3D-printen
- Hoe seconden om te zetten in mijlen per uur
- Nieuwe thermische fasen van topologische kwantummaterie in het laboratorium
- Meteorietinslagen maakten leven op aarde mogelijk
- De beste manier om klimaatverandering tegen te gaan? Plant een biljoen bomen
- De kosten van leuk gevonden worden op sociale media
- Amazon-werknemers in Minnesota plannen 6 uur durende staking tijdens Prime Day-evenement
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Norway | Portuguese | Danish |

-
Wetenschap © https://nl.scienceaq.com
