Wetenschap
Agile ongebonden volledig zachte robots in vloeistof
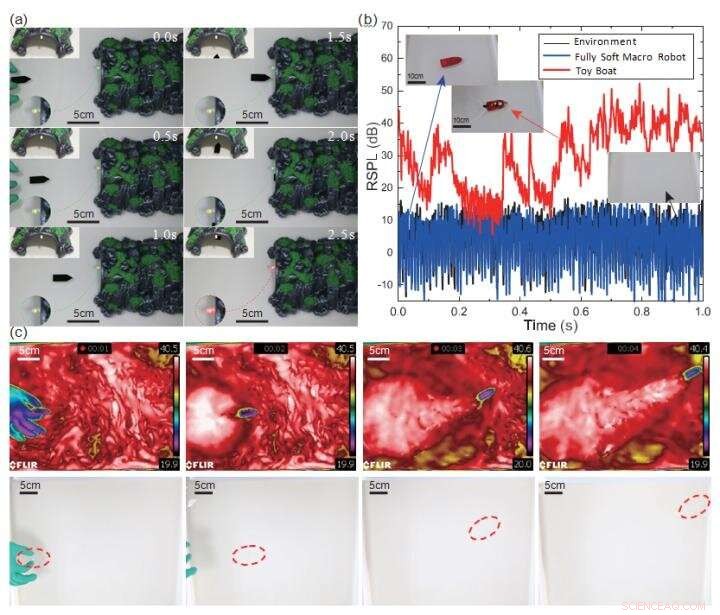
(a) Foto's van een robot die zich richt op een door LED aangegeven pad. De targetingdemonstratie toont de nauwkeurigheid die de robotbesturing kan bereiken. (b) Vergelijking van het gemeten relatieve geluidsniveau van een zachte macrorobot en een batterijgevoede, speelgoedboot van vergelijkbare grootte. RSPL staat voor het relatieve geluidsdrukniveau. De robot vertoont een veel lager geluidsniveau in vergelijking met de speelgoedboot. (c) Foto's van een koude robot die in warm water beweegt, gemaakt door een infraroodvideocamera en een normale camera, respectievelijk. Krediet:©Science China Press
Zachte robots hebben de afgelopen jaren veel aandacht gekregen vanwege hun unieke eigenschappen in vergelijking met traditionele rigide robots. Echter, in tegenstelling tot de Baymax in de film "Big Hero 6, " state-of-the-art zachte robot is slechts een prototype in laboratoria, meestal vastgebonden, wat betekent dat er een elektrische draad of pneumatische buizen voor nodig zijn. Om het volledige potentieel van zachte robots te benutten, ongebonden ontwerp heeft de voorkeur. Bestaande benaderingen om de zachte robots uit te rusten met een ongebonden ontwerp, omvatten meestal stroombronnen met een hoge energiedichtheid, wat leidt tot integratieproblemen, anders zal de robot omvangrijk en onhandig zijn om stroombronnen met een lage energiedichtheid te vervoeren.
In de natuur zijn enorme wezens die zich miljarden jaren hebben ontwikkeld om te overleven. Kortschildkevers in het geslacht Stenus, een soort terrestrische insecten leeft rond poelen of beekjes, een uitbarsting van kinetische energie zouden krijgen om te ontsnappen wanneer ze per ongeluk op het water vielen, door chemicaliën af te scheiden om een oppervlakte-energiegradiënt te genereren. Zo'n voortstuwend proces, algemeen bekend als Marangoni Propulsion, werd geadopteerd door levende wezens, dus het was mild en zachtaardig, volledig compatibel met zachte materialen.
In een nieuw onderzoeksartikel gepubliceerd in het in Peking gevestigde Nationale wetenschappelijke recensie , wetenschappers van de Huazhong University of Science &Technology rapporteren een ongebonden volledig zachte robot in vloeistof waarvan de bediening gebruikmaakt van omgevingsenergiegradiënten. Door milieuactieve materialen (EAM's) af te geven aan de vloeibare omgeving, de robot zou een behendige snelheid van 5,5 lichaamslengtes per seconde kunnen behalen, wat 7 keer hoger is dan de best gerapporteerde waarde in de ongebonden zachte robotvis.
"Er doen zich enkele voordelen voor door een dergelijk mechanisme toe te passen, zoals rust, geen thermische vermoeidheid enzovoort." Prof. Zhigang Wu zei:"Belangrijker, de bediening en de robotfunctionele realisatie kunnen afzonderlijk worden aangevuld. De ontwerper, Voor de eerste keer, krijgt de mogelijkheid om zich te concentreren op de functierealisatie. Dit kan de zachte robot in de toekomst in sommige onaangeroerde scenario's mogelijk maken."
 Wetenschappers vinden nieuwe manier om chirale moleculen te produceren die veiligere en goedkopere medicijnen kunnen opleveren
Wetenschappers vinden nieuwe manier om chirale moleculen te produceren die veiligere en goedkopere medicijnen kunnen opleveren- Hoe Paper
- Hoeveel zout heeft het nodig om een ei in water te drijven?
- Wetenschappers ontdekken verbinding die zich richt op kankercellen die het beschermende p53-voogdgen missen
- Type reacties met koper en salpeterzuur
- Nieuw model beschrijft golfgedrag in zeestraten, voorspelt moordende golven
- Hoe vang je een blauwe krab in Florida
- Hoe het vertellen van de juiste verhalen ervoor kan zorgen dat mensen actie ondernemen tegen klimaatverandering
- Ureumabsorberend vermogen van reuzenschelpdieren
- NASA-infraroodbeelden onthullen krachtige tropische cycloon Idai aan de kust van Mozambique
Hoofdlijnen
- DropSynth, een eenpotsbenadering van gensynthese
- De rol van de longen
- Een DNA-model maken met piepschuimballen
- Welke invloed heeft veroudering op de mogelijkheid om homeostase te herstellen?
- Natuurbeschermingsgroep zegt dat Japan helpt bij illegale ivoorhandel (update)
- Lokale elektrische reacties in bladeren maken fotosynthese hittetolerant
- Voedselgeur verbetert de aantrekkelijkheid van mannelijke vliegen
- Hoe goede bacteriën je genen beheersen
- Vissenseks zo luid dat dolfijnen doof kunnen worden
- Videoconferenties schieten omhoog met Microsofts Teams-software

- China's app voor het delen van fietsen Ofo haalt $ 850 miljoen op om overzee uit te breiden

- Sensorstickers transformeren het menselijk lichaam in een multi-touch oppervlak

- Smartphone-netwerk helpt bij het ontdekken van honderden antikankermoleculen in voedsel

- Breken met Facebook:gebruikers bekennen dat ze minder tijd besteden


 Wat als Neanderthalers nog leefden?
Wat als Neanderthalers nog leefden? - Systeem kan schade minimaliseren wanneer zelfrijdende voertuigen crashen
- Google om te pronken met nieuwe telefoon, apparaten op evenement in New York
- CBS, Viacom herenigt zich als mediagiganten voor streaming
- Sociale cohesie meten en waarom de recente dip ertoe doet
- Onderzoekers verhogen de werkzaamheid van medicijnen door nanodeeltjes te gebruiken om de krachtpatser van cellen te targeten
- Wanneer lithium-ionbatterijen op het beste gedrag worden geplaatst
- Levenscyclus van pinguïns
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
