Wetenschap
Robotbesturingssysteem voor het grijpen en loslaten van objecten onder zowel droge als natte omstandigheden
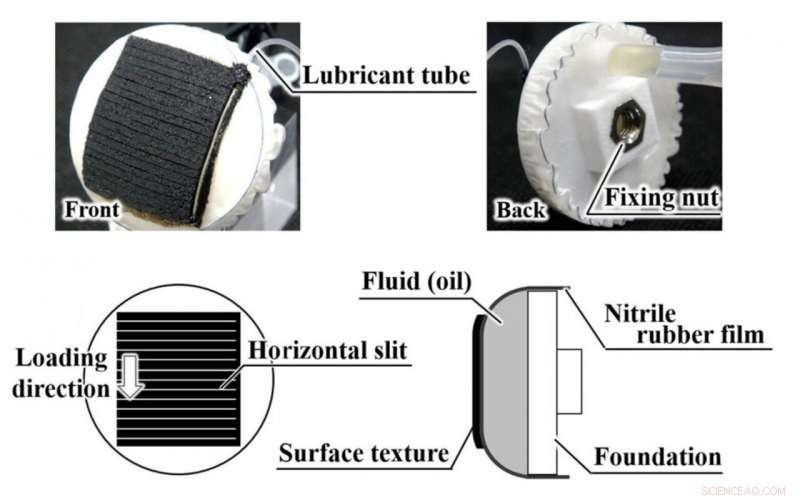
Dit is een vloeibare vingertop met een gebonden oppervlaktetextuur. Krediet:Universiteit van Kanazawa
Industriële robots worden nu veel gebruikt en zijn onmisbaar in de autoproductie en op andere gebieden. Conventionele robothanden zijn geschikt voor het vastpakken van harde voorwerpen met een vaste vorm, terwijl het niet gemakkelijk is om ingewikkelde voorwerpen vast te pakken of zachte voorwerpen voorzichtig vast te pakken. Het is ook nodig, onder verschillende omstandigheden, om te reageren op fysieke kenmerken van objecten zoals oppervlaktekenmerken:droog, nat, enzovoort.
Een vingertop met een zacht oppervlak van een robothand is vervormbaar en kan een voorwerp met een gecompliceerde vorm vrij gemakkelijk vastpakken, omdat het contactgebied kan worden vergroot door oppervlaktevervorming in reactie op de objectvorm. Vingertoppen met een zacht oppervlak zijn zeer effectief in het grijpen van zachte voorwerpen; zelfs tofu kan worden gegrepen. Over het algemeen, echter, de oppervlaktewrijving van zacht materiaal is hoog, wat het loslaten moeilijker maakt. Het is ook moeilijk om objecten in de gewenste posities los te laten, vooral in gevallen waar de werkruimte smal is.
Een groep onder leiding van prof. Tetsuyou Watanabe aan de Kanazawa University heeft onderzoek gedaan naar besturingstechnologie voor het grijpen van objecten met de vingertoppen van robothanden. In de huidige studie, de groep wilde een wrijvingscontrolesysteem ontwikkelen. De groep gebruikte de zachte vingertoppen van een robothand om objecten vast te pakken; het vrijgeven werd bewerkstelligd door het aanbrengen (injecteren) van een smeermiddel. In dit onderzoek, absolute ethanol (> 99,5%) werd gebruikt als smeermiddel, aangezien ethanol chemisch veilig en gemakkelijk te drogen is, en aangezien de oppervlaktespanning laag is.
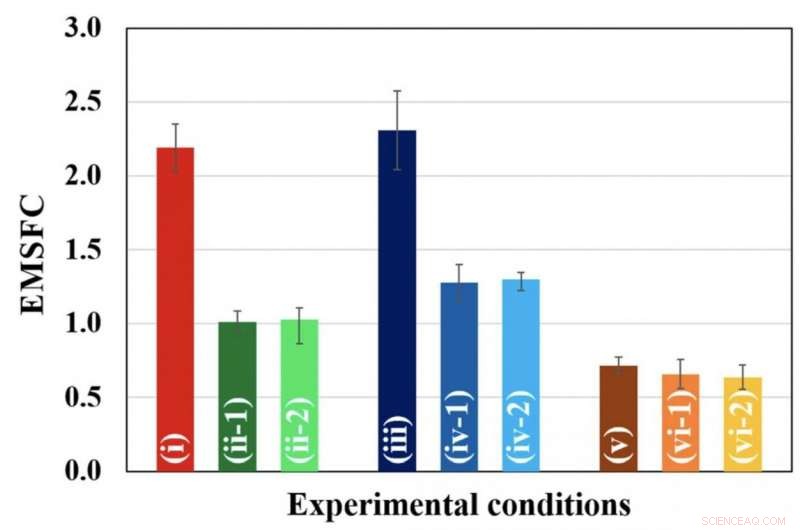
EMSFC onder verschillende experimentele omstandigheden. Het doelmateriaal was polypropyleen. Een object van polypropyleen werd vastgepakt met vloeibare vingertoppen, zoals weergegeven in figuur 1. en de equivalente maximale statische wrijvingscoëfficiënt (EMSFC)*2) werd gemeten om het effect van het smeermiddel te onthullen. (i) droog:(ii-1) droog, smeermiddel geïnjecteerd voor grijpen:(ii-2) droog, smeermiddel geïnjecteerd na vastpakken:(iii) nat met water:(iv-1) nat met water, smeermiddel geïnjecteerd voor grijpen:(iv-2) nat met water, smeermiddel geïnjecteerd na vastpakken:(v) olieachtig met kettingzaagolie:(vi-1) olieachtig met kettingzaagolie, smeermiddel geïnjecteerd voor grijpen:(vi-2) olieachtig met kettingzaagolie, smeermiddel geïnjecteerd na het grijpen. Het effect van het smeermiddel, absolute ethanol, werd gecontroleerd onder zowel droge als natte omstandigheden. Krediet:Universiteit van Kanazawa
Zoals te zien in figuur 1, een nitrilrubberfilm werd aan de zijkanten van de vingertopbasis gehecht om een ruimte te creëren voor het vullen met kettingzaagolie om een "vloeibare vingertop" te maken. Vervolgens werd een siliconen "textuur") gebonden om de rubberfilm te bekleden; het materiaal van de "textuur" was een siliconenkit met spleten, waarvan het interval 1,5 mm was, loodrecht op de lastrichting. De sleuven zijn aangebracht voor meer wrijving onder water-natte omstandigheden en voor smeermiddelverspreiding. Met deze vloeiende vingertop, voorwerpen van verschillende materialen die voor keukengerei werden gebruikt, werden gegrepen en er werd geverifieerd dat, bij het aanbrengen van het smeermiddel, de wrijving was inderdaad verminderd (Figuur 2). De wrijving werd verminderd onder zowel droge als natte omstandigheden, terwijl een dergelijk smerend effect niet werd waargenomen onder olieachtige omstandigheden.
Volgende, een simulatie van een doosverpakkingstaak werd uitgevoerd zoals weergegeven in figuur 3. Een papieren doos werd van beide kanten met twee vloeibare vingertoppen vastgepakt. De hierboven beschreven "textuur" werd aan elke vloeibare vingertop gehecht. Stabiel grijpen werd bevestigd door een gewicht op de papieren doos te plaatsen. Na het verwijderen van het gewicht, glijmiddel werd in beide vloeibare vingertoppen geïnjecteerd, die in een vrij korte tijd (minder dan 2,5 s) een neerwaartse slip van de papieren doos veroorzaakte, zodat de taak voor het verpakken van de papieren doos is voltooid (Figuur 3). Zoals hier getoond, een "textuur" van hoge wrijving was gebonden aan de vloeibare vingertop, en het injecteren van een smeermiddel (hier, absolute ethanol) verminderde de wrijving. Dus, het loslaten en plaatsen van een object op een gewenste positie werd bereikt door de wrijving te regelen zonder de vingertoppen te bewegen.
In dit onderzoek, er werd geverifieerd dat het vastgrijpen van voorwerpen door zachte vingertoppen van vloeistof met hoge wrijving controleerbaar was door een geschikt smeermiddel aan te brengen. Het is, echter, nodig om meer experimenten te doen onder verschillende omstandigheden om de huidige besturingstechnologie toe te passen op productieomgevingen. Niettemin, deze studie zal naar verwachting een stap voorwaarts zijn voor het realiseren van werkautomatisering van, bijvoorbeeld, grijpen en loslaten van objecten in een nauwe ruimte.
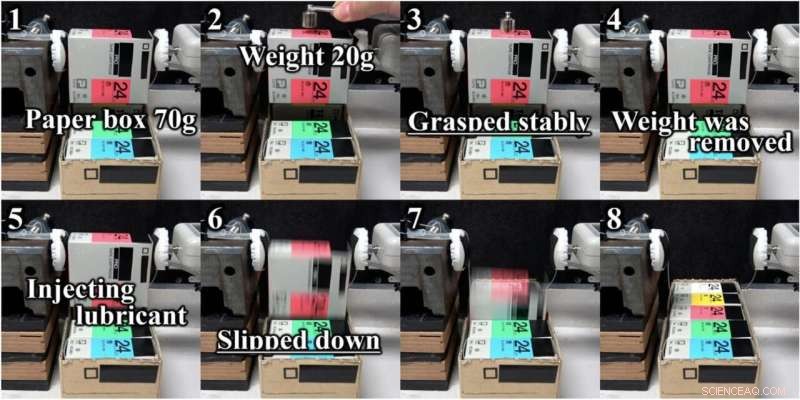
Dit is een simulatie van een taak voor het inpakken van een papieren doos. (1) Een papieren doos (70 g) werd met twee vloeibare vingertoppen aan de linker- en rechterkant vastgepakt, (2) Een gewicht van 20 g op de papieren doos plaatsen, (3) Bevestiging van het stabiele grijpen, (4) Het gewicht verwijderen, (5) Smeermiddel inspuiten, (6) De papieren doos glijdt naar beneden, (7) De papieren doos glijdt in de kleine letters, (8) Voltooiing van de verpakking van de papieren doos. Krediet:Universiteit van Kanazawa
 Snelle ontwerpmethode voor mini-eiwitten opent de weg om een nieuwe klasse geneesmiddelen te creëren
Snelle ontwerpmethode voor mini-eiwitten opent de weg om een nieuwe klasse geneesmiddelen te creëren- MIT-startup verpakt voedsel in zijde voor een betere houdbaarheid
- Onderzoekers onderzoeken signaaloverdracht in eiwitten over meerdere tijdschalen
- Onderzoekers ontwikkelen een nieuw apparaat om gluten efficiënter te detecteren
- Hoe naam Polyatomische Ionen
- Wetenschappers in Fiji onderzoeken hoe bosbehoud koraalriffen helpt
- Hoe wetenschappers drones gebruiken om het risico op catastrofale overstromingen van grote gletsjermeren te verkleinen
- Mange in Squirrels behandelen
- Om de bruikbaarheid van koeienmest duurzaam te benutten, vuur het aan
- Platina levert bewijs voor oude vulkanische klimaatverandering, zegt studie
Hoofdlijnen
- Giftige Death Cap-paddenstoel verspreidt zich over Noord-Amerika
- De ontdekking van een mijlpaal verandert de evolutiemarathon in een sprint
- Paring induceert seksuele remming bij vrouwelijke springspinnen
- Twee hersengebieden werken samen om vinken te helpen weten wanneer en hoe ze hun liedjes moeten afstemmen op specifieke situaties
- Hoe is de taal geëvolueerd?
- Wat is een andere naam voor somatische stamcellen en wat doen ze?
- Onderzoekers genereren tomaten met verbeterde antioxiderende eigenschappen door genetische manipulatie
- Celcontacten in embryonale ontwikkeling bepalen cellulair lot
- Is er een psychologische reden waarom mensen gemeen zijn op internet?
- Bayer-aandelen kelderen na uitspraak over kanker Monsanto
- Ubisoft ziet blockbusters gevormd door fans en sterren

- Amerikaanse senatoren waarschuwen voor vertrouwenskloof over digitale valuta van Facebook

- De robots worden klaargemaakt om nucleaire no-go zones binnen te gaan

- Nu de EU-privacywetgeving opdoemt, debat wervelt over de impact van cyberbeveiliging


 Maanden van tevoren de moessonregen voorspellen met satellieten en simulaties
Maanden van tevoren de moessonregen voorspellen met satellieten en simulaties- Nieuwe microscopie onder omgevingstemperatuur bereikt een ruimtelijke resolutie van minder dan 10 nm bij meting van oppervlaktepotentiaal
- Historische overstromingen voorspeld langs de rivier de Arkansas
- Stop de houtkap na verstoring in bossen
- Wetenschappers beginnen de geheimen van de kleur van de diepe oceaan te ontrafelen uit organisch materiaal
- Universeel gedrag gedetecteerd in Mott metaal-isolator overgang
- Vijf manieren om water te besparen in de woestijn
- AMD-processors die kwetsbaar zijn voor beveiligingsproblemen, datalekken
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | French | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
