Wetenschap
Een techniek om de fysieke interactie in luchtrobots te verbeteren
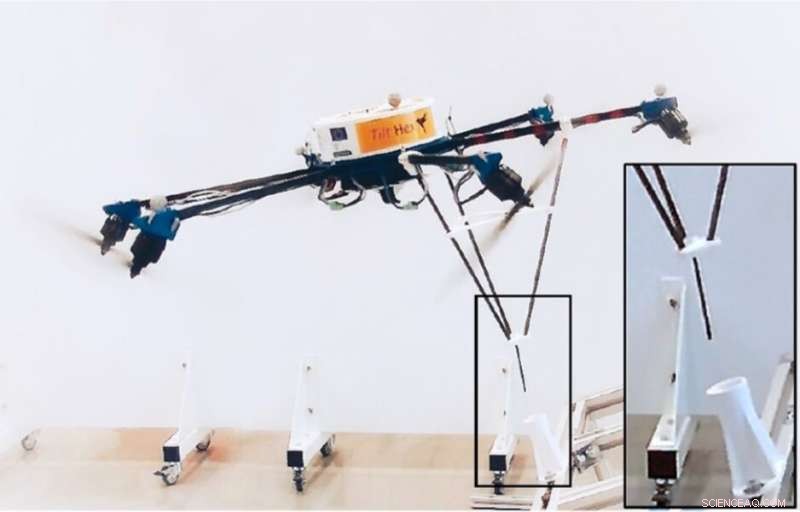
De Tilt-Hex (NCFTP-hoogwerker met gekantelde propellers ontwikkeld bij LAAS-CNRS) met de star bevestigde eindeffector. Merk op hoe de interactie ver weg en niet gecentreerd van het voertuig CoM plaatsvindt. Krediet:Ryll et al.
In recente jaren, luchtrobots worden steeds populairder, met mogelijke toepassingen op verschillende gebieden. Veel van deze robots zijn in de eerste plaats ontworpen om rond te vliegen en visuele gegevens uit hun omgeving te verzamelen, maar sommigen kunnen ook begrijpen, voorwerpen dragen of zelfs in elkaar zetten.
Het uitrusten van luchtrobots met geavanceerde fysieke interactiemogelijkheden kan ongelooflijk nuttig zijn, omdat het hen in staat zou stellen om complexere taken uit te voeren. Echter, vanwege de complexe aard van aerodynamica, dit is vaak erg uitdagend gebleken, vooral wanneer een voertuig zich dicht bij oppervlakken bevindt.
Onderzoekers van de Universiteit van Cassino en Zuid-Lazio, Université de Toulouse en de Universiteit van Basilicata hebben onlangs een nieuw paradigma geïntroduceerd dat 6D-interactiecontrole in luchtrobots mogelijk maakt. Hun aanpak, beschreven in een paper gepubliceerd in SAGE's International Journal of Robotics Research , zou de weg kunnen effenen voor de ontwikkeling van effectievere luchtsystemen die beter presteren dan bestaande robots bij luchtmanipulatie en fysieke interactietaken.
Het nieuwe paradigma voorgesteld door de onderzoekers, genaamd 6-D vliegende eindeffector, kan worden toegepast op de meeste, zo niet alle, volledig geactiveerde systemen die in staat zijn om een full-pose traject te volgen met de eindeffector. In de studie, het werd specifiek toegepast op Tilt-Hex, een nieuwe luchtrobot, waardoor de onafhankelijke controle van de lineaire en hoekversnelling mogelijk is. Dit stelde de robot uiteindelijk in staat om elke moersleutel die hij tegenkwam bij interactie met zijn omgeving onmiddellijk tegen te gaan.
"Door gebruik te maken van zijn gekantelde propelleraandrijving, de robot is in staat om de volledige 6-D pose te controleren (positie en oriëntatie onafhankelijk) en om een volledige sleutel uit te oefenen (kracht en koppel onafhankelijk) met een star bevestigde eindeffector, ", leggen de onderzoekers uit in hun paper. "Interactie wordt bereikt door middel van een toelatingscontroleschema waarin een buitenste luscontrole het gewenste toelatingsgedrag regelt (d.w.z. interactienaleving/stijfheid, demping, en massa) en een binnenste lus op basis van inverse dynamiek zorgden voor volledige 6-D pose-tracking."
Het door de onderzoekers ontwikkelde paradigma schat interactiekrachten met behulp van een inertial Measurement Unit (IMU)-versterkte op momentum gebaseerde waarnemer. Wanneer het is geïntegreerd met bekende robotalgoritmen, kan het een schatting van de moersleutel bereiken, evenals beweging en interactie controle. interessant, dit "geïntegreerde systeem" vereist geen krachtsensor in zijn basisconfiguratie en werkt zelfs met een minimale sensorsuite.
De onderzoekers hebben de effectiviteit van het 6-D vliegende eindeffector-paradigma geëvalueerd in een reeks experimenten, gericht op vier casestudies:een harde aanraking en glijden op een houten oppervlak (d.w.z. de taak met het glijdende oppervlak), een gekantelde peg-in-hole-taak, een toelatingsvormend experiment, en een taak in aanwezigheid van in de tijd variërende interactiekrachten. Deze evaluaties leverden veelbelovende resultaten op, het aantonen van de veelzijdigheid en robuustheid van de aanpak, zelfs in aanwezigheid van onzekerheden in het milieu.
Bovendien, het nieuwe paradigma bleek beter te presteren dan andere technieken voor manipulatie vanuit de lucht in zijn mogelijkheden, evenals in zijn betrouwbaarheid, complexiteit en kosten. Het zou dus kunnen helpen bij de ontwikkeling van meer geavanceerde luchtsystemen die beter presteren bij manipulatie en fysieke interactietaken.
"In de toekomst, we zullen streven naar volledige autonomie van het systeem door het motion capture-systeem te vervangen door een volledige toestandsschatting aan boord, ', schrijven de onderzoekers in hun paper. 'Bovendien, we gaan werken aan differentiatie van contactkrachten op de gereedschapspunt en verstoringen op het platform (bijv. windstoten)."
© 2019 Wetenschap X Netwerk
 Wat is een neerslagreactie?
Wat is een neerslagreactie? - Bacteriebestrijdende polymeren gemaakt met licht
- Biochemici melden een manier om de onsterfelijkheid van kankercellen met oligonucleotiden te stoppen
- Kleine gels zuigen darmtoxines op
- Onderzoekers ontsluiten kankerverwekkend mechanisme van E. coli-toxine met synthetische biologie
- De effecten van menselijke activiteit op de koolstofcyclus
De koolstofcyclus is een van de vele biogeochemische cycli waarmee de verschillende verbindingen die nodig zijn voor het leven, zoals water, stikstof, zwavel, koolstof en fosfor, continu wo
- De ruimtelijke consistentie van de variabiliteit van de zomerregen tussen het Mongoolse plateau en Noord-China
- Economische groei heeft verwoestende kosten voor de natuur, recensie vondsten
- Ze hebben het bos voor altijd beheerd. Daarom zijn ze de sleutel tot de strijd tegen klimaatverandering
- Planten en dieren in loofbossen
Hoofdlijnen
- Biochemistry Blotting Techniques
- Voordelen en nadelen van Western Blot
- De patronen van klimaatverandering
- Het richten op een enkel eiwit kan een breed scala aan virussen behandelen
- Kenmerken van micro-organismen
- Aardappelziekte chemisch aanvalsmechanisme uitgelegd
- Nieuwe studie voorspelt wereldwijde verandering in ondiepe rifecosystemen als het water warmer wordt
- Wie eet wie? Hoe klimaatverandering de interacties tussen vissen en roofdieren verandert
- De chemie van melanine
- Microsoft schudt gelederen op om voor de cloud te schieten

- Schoonheid zit in het algoritme van de toeschouwer

- Opneembare bacteriën op een chip kunnen helpen bij het diagnosticeren van ziekte

- Nieuwe tool stroomlijnt het maken van bewegende beelden

- Google brengt Android 10 uit:de top 8 manieren waarop je telefoon zal verbeteren


 Metamaterialen openen geheel nieuwe mogelijkheden in de optica
Metamaterialen openen geheel nieuwe mogelijkheden in de optica- Koreaanse onderzoekers gebruiken grafeen om transparante luidsprekers te maken
- Minimalisering van de uitstoot van ammoniakbrandstof
- Onderzoekers nu een stap dichter bij gecontroleerde engineering van nanokatalysatoren
- Onderzoekers lanceren videogame die de effecten van opsluiting onderzoekt
- Onderzoekers bevestigen dat enorme hyperop hol geslagen ster uit de Melkweg is gegooid
- Wat is een glijlager?
- Een sleutel vinden om geblokkeerde differentiatie in microRNA-deficiënte embryonale stamcellen te ontgrendelen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
