Wetenschap
Een zwermrobotica-benadering geïnspireerd op gedrag waargenomen in micro-organismen
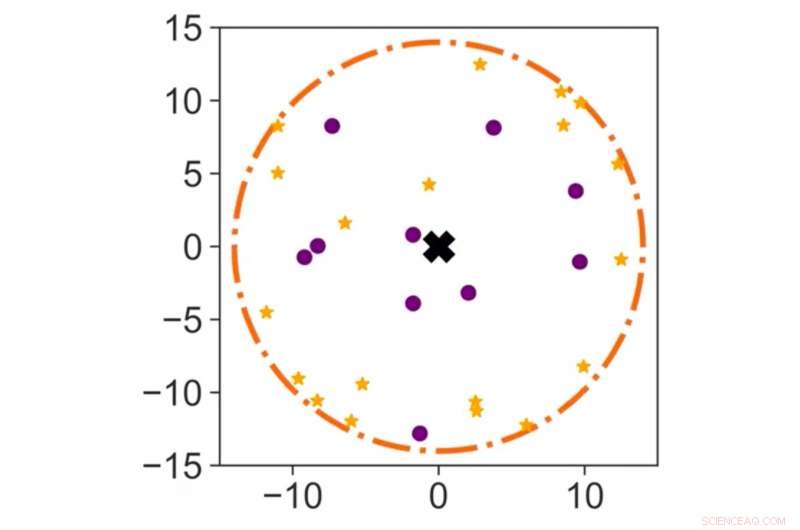
Krediet:Obute, Dogar &Boyle.
Veel dieren en micro-organismen zijn in staat om complexe taken uit te voeren, zoals het vinden van voedsel of het bouwen van nesten, als een team, of "zwerm". Een van de meest voor de hand liggende voorbeelden hiervan zijn bijen, omdat hun voortbestaan als groep sterk afhankelijk is van samenwerking met andere leden van hun kolonie. De afgelopen jaren is een groeiend aantal onderzoekers heeft geprobeerd deze fascinerende groepsdynamiek in robots te reproduceren, waardoor een studiegebied ontstond dat zwermrobotica wordt genoemd.
Onderzoekers van de Universiteit van Leeds hebben onlangs een nieuwe zwermrobotica-benadering gepresenteerd, chemotaxis genaamd, geïnspireerd door een bepaald gedrag waargenomen in micro-organismen, . hun studie, voorgepubliceerd op arXiv, komt voort uit de interesse van de auteurs in het voortbestaan van eenvoudige ongewervelde dieren in dynamische real-world omgevingen, en hoe deze strategieën kunnen worden toegepast in robots.
"Tijdens mijn doctoraat en eerste postdoctoraal mandaat, Ik bestudeerde het voortbewegingssysteem van een kleine worm genaamd C. elegans (een populair modelorganisme), en met succes toegepast wat ik heb geleerd om de voortbeweging van een slangachtige robot te besturen, "Jordan Boyle, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Het huidige werk is geïnspireerd op hetzelfde organisme, maar deze keer, kijkend naar zijn gedrag op een hoger niveau - met name de manier waarop het naar voedselbronnen navigeert met behulp van zijn reukvermogen."
Bij afwezigheid van zintuiglijke input, C. elegans wormen gaan meestal vooruit, maar maak grote bochten met willekeurige tijdsintervallen. Als ze voelen dat een "positieve" geur sterker wordt naarmate ze in een bepaalde richting bewegen, de frequentie van hun beurten neemt af. omgekeerd, wanneer de "positieve" of "gewenste" geur zwakker wordt, er is een grotere kans dat ze zullen draaien. Dit gedrag, bekend als chemotaxis, uiteindelijk kunnen ze aangetrokken worden naar locaties waar een gewenste sensorische stimulus op zijn hoogtepunt is. In hun studie hebben Boyle, zijn collega Mehmet Dogar en Ph.D. student Simon Obute wilde deze groepsstrategie repliceren in robotzwermen en het nut ervan evalueren.
"Een belangrijk voordeel van deze strategie is dat er slechts één analoge sensor nodig is, omdat gradiënten in de loop van de tijd worden gedetecteerd als het dier beweegt, " legde Boyle uit. "In ons werk, we hebben geur vervangen door geluid, omdat het veel gemakkelijker is om te creëren en te voelen met een robot, en wordt ook zwakker naarmate je verder van de bron komt, Boyle legt uit. "De belangrijkste voordelen van deze aanpak zijn dat een groep zwermrobots kan worden beperkt tot een specifiek gebied (d.w.z. rond een geluidsbron) zonder dat er een fysieke grens nodig is, mapping vermogen of complexe sensorische systemen."
Met behulp van een algoritme dat ze ontwikkelden, de onderzoekers pasten chemotaxis toe op een zwerm verkenningsrobots, wat hen uiteindelijk ertoe aanzet om terug te keren naar een bepaald werkgebied rond hun nest dat zich in een onbeperkte omgeving bevindt. Ze testten hun prestaties, en daarmee de effectiviteit van hun aanpak, in een reeks simulatie- en hardwarevalidatie-experimenten. Hoewel hun resultaten voornamelijk gebaseerd zijn op simulaties en niet op real-world implementaties, de onderzoekers ontdekten dat ze erin slaagden nauwkeurige modellen van geluidsvoortplanting op te nemen.
"Onze hardwareresultaten zijn voorlopig maar veelbelovend op dit moment, ' zei Boyle. 'Uiteindelijk, dit werk kan relevant zijn voor fysieke zwermen bestaande uit zeer kleine, goedkope robots met beperkte zintuiglijke en rekenkundige mogelijkheden. Hoewel praktisch, real-world inzet van robotzwermen is nog ver weg, ze hebben potentieel in veel toepassingen."
In de toekomst, experimenten met echte robots kunnen helpen om de effectiviteit van deze nieuwe bio-geïnspireerde aanpak vast te stellen. Als deze tests positieve resultaten opleveren, het door Boyle en zijn collega's ontwikkelde algoritme zou uiteindelijk kunnen worden gebruikt om de navigatie- en oriëntatiestrategieën van robotzwermen te verbeteren, vooral wanneer de omgevingen waarin ze navigeren niet duidelijk in kaart of gedefinieerd zijn.
Obute werkt nu aan de integratie van chemotaxis in complexere zwermrobotsystemen, zowel in simulaties als in enkele hardware-experimenten. Zijn laatste Ph.D. project onderzoekt specifiek de mogelijkheid om zwermrobots in te zetten voor het verzamelen van stadsafval. Boyle, anderzijds, plans to continue exploring biological strategies that could prove particularly useful for robotics applications.
"Currently, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Wetenschap X Netwerk
 Onderzoeker verandert vuil aluminiumfolie in katalysator voor biobrandstof
Onderzoeker verandert vuil aluminiumfolie in katalysator voor biobrandstof- Onderzoekers ontwikkelen zich snel, efficiënte manier om aminozuurketens te bouwen
- Hoe het aantal ionen in een verbinding te vinden
- Onderzoekers hopen naaldprikken voor diabetici tot het verleden te maken
- Een reactie op preparatieve schaal met behulp van platinaclusters met een gerealiseerde eencijferige atomiciteit
- NASA-NOAA-satelliet vindt windschering op tropische storm Gabrielle
- Is algen een decomposer, een aaseter of een producent?
- Nieuwe ijskernboringen in Noordoost-Groenland
- Archeologie gebruiken om het verleden te begrijpen, Cadeau, toekomst van klimaatverandering
- Een betere planning zou de schade door overstromingen in Brazilië kunnen beperken. Maar zou het genoeg zijn geweest?
Hoofdlijnen
- Vijf soorten aseksuele reproductie
- Regulering van CO2 in het lichaam
- Je lichaam aan: een hittegolf
- Amazoneboeren ontdekten het geheim van het domesticeren van wilde rijst 4, 000 jaar geleden
- Hoe beïnvloedt DNA-replicatie je lichaam?
- Rollende dobbelstenen voor specificatie van celgrootte in epidermis van planten
- Zijn gelukkige mensen aardiger?
- Hoe succesvol te zijn in de microbiologie
- Wat doen alle delen van een cel?
- Vraag en antwoord met Jason Hong over oplichting en andere kwetsbaarheden tijdens de COVID-19-pandemie

- Frankrijk zegt dat de VS zich terugtrekt in de digitale belastingovereenkomst

- Ford schrapt banen in Europese opknapbeurt

- Techreuzen reageren sneller op haatzaaien:EU

- Een teamtool kan het geheime leven van je smarthome-items inspecteren


 Hubble bestudeert bron van zwaartekrachtsgolven
Hubble bestudeert bron van zwaartekrachtsgolven- Een zonnecel maken uit huishoudelijke materialen
- Onderzoekers gebruiken licht om snelle chemische reacties op een nieuwe manier te beheersen
- Onzekerheden in het klimaatmodel rijpen om te worden uitgeknepen
- De meeste mensen veranderen hun mening niet na het zien van raciale verschillen in politiestatistieken
- Laserkarteringsproject toont effecten van fysieke veranderingen in de droge valleien van Antarctica
- UC professoren startup bevordert geletterdheid door middel van design
- Meer dan acht op de tien mannen in de gevangenis leden aan tegenspoed in hun jeugd - nieuw rapport
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
