Wetenschap
Eerste succesvolle hersengestuurde robotarm zonder hersenimplantaten
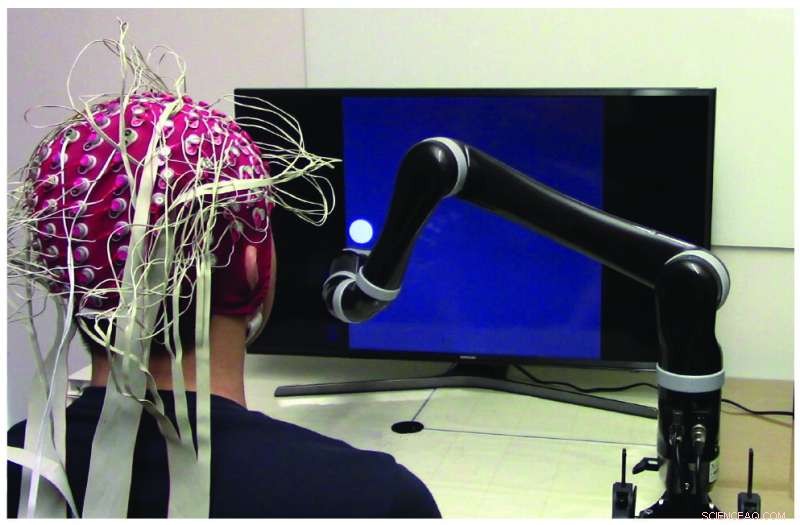
BCI-opstelling met behulp van een robotarm. Gebruikers bestuurden de continue 2D-beweging van een robotarm om een willekeurig bewegend doelwit op een computerscherm te volgen. Krediet:Edelman et al., Wetenschap. Robot. 4, eaaw6844 (2019)
Een team van onderzoekers van de Carnegie Mellon University, in samenwerking met de Universiteit van Minnesota, heeft een doorbraak gemaakt op het gebied van niet-invasieve robotbesturing. Met behulp van een niet-invasieve hersencomputerinterface (BCI), onderzoekers hebben de allereerste succesvolle hersengestuurde robotarm ontwikkeld die het vermogen vertoont om continu een computercursor te volgen en te volgen.
In staat zijn om niet-invasieve robotapparaten te besturen met alleen gedachten, zal brede toepassingen hebben, in het bijzonder ten goede komen aan het leven van verlamde patiënten en mensen met bewegingsstoornissen.
Het is aangetoond dat BCI's goede prestaties leveren voor het besturen van robotapparatuur met alleen de signalen die worden waargenomen van hersenimplantaten. Wanneer robotapparaten met hoge precisie kunnen worden bestuurd, ze kunnen worden gebruikt om een verscheidenheid aan dagelijkse taken uit te voeren. Tot nu, echter, BCI's die succesvol zijn in het besturen van robotarmen, hebben invasieve hersenimplantaten gebruikt. Deze implantaten vereisen een aanzienlijke hoeveelheid medische en chirurgische expertise om correct te installeren en te bedienen, om nog maar te zwijgen van de kosten en mogelijke risico's voor de proefpersonen, en als zodanig, het gebruik ervan is beperkt tot slechts enkele klinische gevallen.
Een grote uitdaging in BCI-onderzoek is om minder invasieve of zelfs volledig niet-invasieve technologie te ontwikkelen waarmee verlamde patiënten hun omgeving of robotledematen kunnen besturen met behulp van hun eigen 'gedachten'. Dergelijke niet-invasieve BCI-technologie, indien succesvol, zou zo'n hoognodige technologie voor tal van patiënten en mogelijk zelfs voor de algemene bevolking brengen.
Echter, BCI's die niet-invasieve externe detectie gebruiken, in plaats van hersenimplantaten, ontvang "vuilere" signalen, wat leidt tot een huidige lagere resolutie en minder nauwkeurige besturing. Dus, wanneer alleen de hersenen worden gebruikt om een robotarm te besturen, een niet-invasieve BCI is niet bestand tegen het gebruik van geïmplanteerde apparaten. Ondanks dit, BCI-onderzoekers hebben vooruitgang geboekt, hun oog op de prijs van een minder- of niet-invasieve technologie die patiënten overal op een dagelijkse basis zou kunnen helpen.
bin hij, Trustee Professor en afdelingshoofd Biomedical Engineering aan de Carnegie Mellon University, dat doel bereikt, één belangrijke ontdekking tegelijk.
"Er zijn grote vorderingen gemaakt op het gebied van hersengestuurde robotapparaten die hersenimplantaten gebruiken. Het is uitstekende wetenschap, " zegt hij. "Maar niet-invasief is het uiteindelijke doel. Vooruitgang in neurale decodering en het praktische nut van niet-invasieve robotarmbesturing zal grote gevolgen hebben voor de uiteindelijke ontwikkeling van niet-invasieve neurorobotica."
Met behulp van nieuwe detectie- en machine learning-technieken, Hij en zijn lab hebben toegang gekregen tot signalen diep in de hersenen, het bereiken van een hoge resolutie van controle over een robotarm. Met niet-invasieve neuroimaging en een nieuw paradigma van continue achtervolging, Hij overwint de luidruchtige EEG-signalen die leiden tot een aanzienlijke verbetering van de op EEG gebaseerde neurale decodering, en het vergemakkelijken van real-time continue 2-D robotapparaatbesturing.
Een niet-invasieve BCI gebruiken om een robotarm te besturen die een cursor op een computerscherm volgt, voor de eerste keer ooit, Hij heeft bij proefpersonen laten zien dat een robotarm de cursor nu continu kan volgen. Terwijl robotarmen die niet-invasief door mensen werden bestuurd, eerder schokkerig een bewegende cursor volgden, discrete bewegingen - alsof de robotarm de commando's van de hersenen probeerde in te halen - nu, de arm volgt de cursor in een vloeiende, doorlopend pad.
In een paper gepubliceerd in Wetenschap Robotica , het team heeft een nieuw raamwerk opgezet dat de 'hersenen'- en 'computer'-componenten van BCI aanpakt en verbetert door de betrokkenheid en training van gebruikers te vergroten, evenals ruimtelijke resolutie van niet-invasieve neurale gegevens door middel van EEG-bronbeeldvorming.
De krant, "Niet-invasieve neuroimaging verbetert continue neurale tracking voor robotbesturing, " laat zien dat de unieke benadering van het team om dit probleem op te lossen het BCI-leren niet met bijna 60% verbeterde voor traditionele centre-out-taken, het verbeterde ook het continu volgen van een computercursor met meer dan 500%.
De technologie heeft ook toepassingen die een verscheidenheid aan mensen kunnen helpen, door veilige, niet-invasieve "mind control" van apparaten waarmee mensen kunnen communiceren met en hun omgeving kunnen besturen. De technologie heeft, daten, getest bij 68 valide proefpersonen (tot 10 sessies voor elke proefpersoon), inclusief virtuele apparaatbesturing en besturing van een robotarm voor continue achtervolging. De technologie is direct toepasbaar op patiënten, en het team is van plan in de nabije toekomst klinische proeven uit te voeren.
"Ondanks technische uitdagingen bij het gebruik van niet-invasieve signalen, we zetten ons volledig in om deze veilige en economische technologie naar mensen te brengen die ervan kunnen profiteren, "zegt He. "Dit werk vertegenwoordigt een belangrijke stap in niet-invasieve hersen-computerinterfaces, een technologie die ooit een alomtegenwoordige ondersteunende technologie kan worden die iedereen helpt, zoals smartphones."
 Maar liefst 1,8 miljoen hectare verbrand in zeer ernstige branden tijdens de Black Summer van Australië
Maar liefst 1,8 miljoen hectare verbrand in zeer ernstige branden tijdens de Black Summer van Australië- Bossen in Europa en Azië lopen een groter risico op schadelijke koudegolf
- Overeenkomsten tussen walvissen en haaien
- Coronavirus moet ons hoop geven dat we de klimaatcrisis het hoofd kunnen bieden
- Wetenschappers vinden stabiele zeespiegel tijdens laatste interglaciaal
Hoofdlijnen
- Doden lindebomen bijen?
- Zwavelademhaling bij zoogdieren
- Heeft Kelp veel verschillende cellen?
- De gemiddelde levensduur van skeletspiercellen
- Perfect bewaarde prehistorische leeuwenwelp gevonden in Russische permafrost
- Bevat RNA een genetische code?
- Van wilde kamelen tot cocaïne-nijlpaarden, grote dieren verwilderen de wereld
- Extra Y-chromosoom bij mannen
- Nieuw inzicht in unieke plantchemicaliën kan toekomstige medicijnontwikkeling informeren
- Het robotoog met een allround gezichtsveld

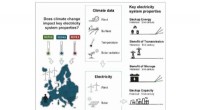
- Europa's elektriciteitsnet zal nog steeds werken, zelfs als de wereld instort:studie
- We kunnen dakpannen maken met ingebouwde zonnecellen - nu is de uitdaging om ze goedkoper te maken

- Internet hersteld in Ethiopië 10 dagen na moorden

- Gepompte opslag waterkracht een game-changer


 Nieuwe methode om grafeen van hoge kwaliteit te kweken, veelbelovend voor next-gen technologie
Nieuwe methode om grafeen van hoge kwaliteit te kweken, veelbelovend voor next-gen technologie- Klimaatcrisis waardoor gezinnen boeren mijden voor gearrangeerde huwelijken
- De impact van palmolieplantages minimaliseren
- Hoe maak je een zelfgemaakte onderzeeër die drijft & zinkt
- In heet water? Onderzoek zegt dat opwarming het zeeleven met 17% kan verminderen
- De voorwaarden scheppen voor een wereldwijd rechtvaardige energietransitie
- Hallo, Alexa. Hallo, Google:uw slimme luidspreker aan de gang krijgen
- Gigantische lasers kristalliseren water met schokgolven, het onthullen van de atomaire structuur van superionisch ijs
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
