Wetenschap
Slothbot neemt een ontspannen benadering van milieumonitoring
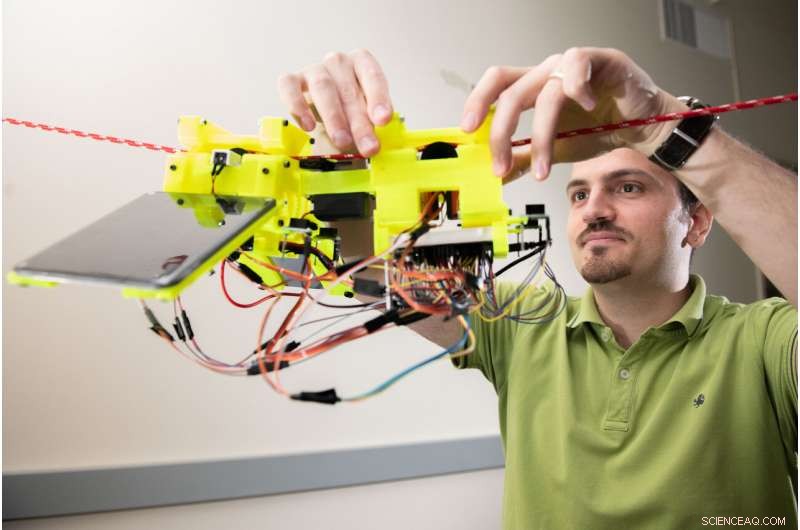
Graduate Research Assistant Gennaro Notomista toont de componenten van SlothBot op een kabel in een Georgia Tech-lab. De robot is ontworpen om langzaam en energiezuinig te zijn voor toepassingen zoals omgevingsmonitoring. Krediet:Allison Carter, Georgië Tech
Voor milieumonitoring, precisie landbouw, onderhoud van de infrastructuur en bepaalde beveiligingstoepassingen, langzaam en energiezuinig kan beter zijn dan snel en moet altijd worden opgeladen. Dat is waar "SlothBot" binnenkomt.
Aangedreven door een paar fotovoltaïsche panelen en ontworpen om maandenlang onafgebroken in het bladerdak te blijven hangen, SlothBot beweegt alleen wanneer het moet om veranderingen in de omgeving te meten, zoals het weer en chemische factoren in de omgeving, die alleen kunnen worden waargenomen bij langdurige aanwezigheid. De proof-of-concept hyperefficiënte robot, beschreven op 21 mei op de International Conference on Robotics and Automation (ICRA) in Montreal, hangt misschien binnenkort tussen boomtopkabels in de botanische tuin van Atlanta.
"Bij robotica het lijkt erop dat we altijd aandringen op sneller, meer wendbare en extremere robots, " zei Magnus Egerstedt, de Steve W. Chaddick School Chair van de School of Electrical and Computer Engineering aan het Georgia Institute of Technology en hoofdonderzoeker voor Slothbot. "Maar er zijn veel toepassingen waarbij het niet nodig is om snel te zijn. Je moet er gewoon langdurig zijn, observeren wat er aan de hand is."
Gebaseerd op wat Egerstedt de 'theorie van traagheid' noemde, " Graduate Research Assistant Gennaro Notomista ontwierp SlothBot samen met zijn collega, Yousef Emam, met behulp van 3D-geprinte onderdelen voor de versnellings- en draadschakelmechanismen die nodig zijn om door een netwerk van draden in de bomen te kruipen. De grootste uitdaging voor een draadkruipende robot is het overschakelen van de ene kabel naar de andere zonder te vallen, zei Notomista.
"De uitdaging is om soepel één draad vast te houden terwijl je een andere vastgrijpt, " zei hij. "Het is een lastige manoeuvre en je moet het goed doen om een faalveilige overgang te bieden. Ervoor zorgen dat de schakelaars goed werken over een langere periode, is echt de grootste uitdaging."
Mechanisch, SlothBot bestaat uit twee lichamen die zijn verbonden door een geactiveerd scharnier. Elk lichaam herbergt een aandrijfmotor die is verbonden met een velg waarop een band is gemonteerd. Het gebruik van wielen voor voortbeweging is eenvoudig, energiezuinig en veiliger dan andere soorten draadgebaseerde voortbeweging, zeggen de onderzoekers.
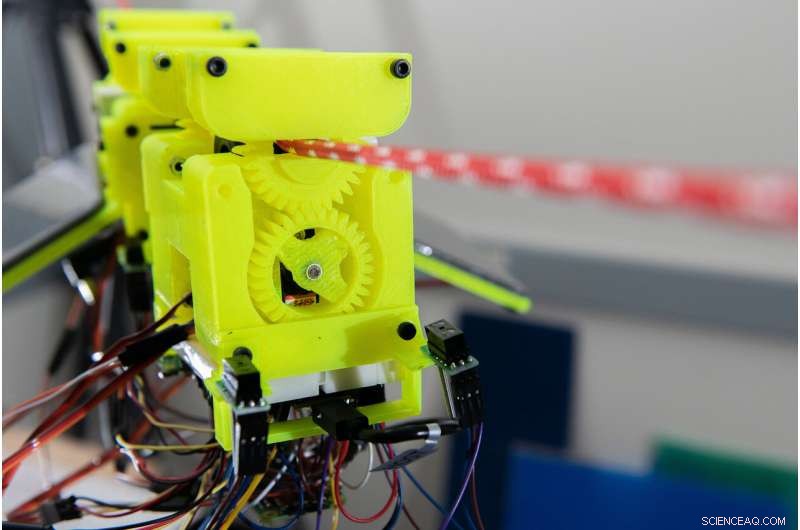
Afbeelding toont onderdelen van de SlothBot, die wordt aangedreven door twee fotovoltaïsche panelen. 3D-geprinte tandwielen en schakelaars helpen de robot om van de ene kabel naar de andere te schakelen. Krediet:Allison Carter, Georgië Tech
SlothBot heeft tot nu toe geopereerd in een netwerk van kabels op de Georgia Tech-campus. Volgende, een nieuwe 3D-geprinte schaal - waardoor de robot meer op een luiaard lijkt - zal de motoren beschermen, versnellingen, actuatoren, camera's, computer en andere componenten tegen regen en wind. Dat zal de basis vormen voor studies op langere termijn in het bladerdak van de Atlanta Botanical Garden, waar Egerstedt hoopt dat bezoekers dit najaar al een SlothBot-monitoringconditie zullen zien.
De naam SlothBot is geen toeval. Echte luiaards zijn kleine zoogdieren die in de jungle van Zuid- en Midden-Amerika leven. In hun levensonderhoud voorzien door boombladeren te eten, de dieren kunnen overleven op het dagelijkse calorie-equivalent van een kleine aardappel. Met hun langzame stofwisseling, luiaards rusten maar liefst 22 uur per dag en dalen zelden af van de bomen waar ze hun hele leven kunnen doorbrengen.
"Het leven van een luiaard gaat vrij traag en er is niet veel opwinding op een dag-tot-dag niveau, " zei Jonathan Pauli, een universitair hoofddocent bij de afdeling Bos- en natuurecologie aan de Universiteit van Wisconsin-Madison, die het Georgia Tech-team over het project heeft geraadpleegd. "Het leuke van een zeer langzame levensgeschiedenis is dat je niet echt veel energie-input nodig hebt. Je kunt een lange duur en volharding hebben in een beperkt gebied met heel weinig energie-input gedurende een lange periode."
Dat is precies wat de onderzoekers van SlothBot verwachten, waarvan de ontwikkeling is gefinancierd door het Amerikaanse Office of Naval Research.
"Er is veel dat we niet weten over wat er werkelijk gebeurt onder dichte, met bomen bedekte gebieden, "Zei Egerstedt. "Meestal zal SlothBot daar gewoon rondhangen, en af en toe zal hij naar een zonnige plek verhuizen om de batterij op te laden."
De onderzoekers hopen SlothBot ook te testen in een cacaoplantage in Costa Rica waar al echte luiaards leven. "De kabels die worden gebruikt om cacao te verplaatsen, zijn een luiaardsnelweg geworden omdat de dieren ze nuttig vinden om zich te verplaatsen, "Zei Egerstedt. "Als alles goed gaat, we zullen SlothBots langs de kabels inzetten om de luiaards in de gaten te houden."

Jonathan Pauli kijkt toe hoe een tweevingerige luiaard langs een kabel naar beneden beweegt op een cacaoplantage in het noordoosten van Costa Rica. Pauli werkt al tien jaar samen met M. Zachariah Peery om boomluiaards in het veld te bestuderen. Krediet:M. Zachariah Peery
Egerstedt staat bekend om algoritmen die zwermen kleine wiel- of vliegende robots aandrijven. Maar tijdens een bezoek aan Costa Rica, hij raakte geïnteresseerd in luiaards en begon met het ontwikkelen van wat hij "een theorie van traagheid" noemt, samen met professor Ron Arkin in Georgia Tech's School of Interactive Computing. De theorie maakt gebruik van de voordelen van energie-efficiëntie.
"Als je dingen doet als milieumonitoring, je wilt maanden in het bos zijn, "Zei Egerstedt. "Dat verandert de manier waarop je denkt over controlesystemen op een hoog niveau."
Vliegende robots worden al gebruikt voor omgevingsmonitoring, maar door hun hoge energiebehoefte kunnen ze niet lang blijven hangen. Robots op wielen kunnen rondkomen met minder energie, maar ze kunnen vast komen te zitten in de modder of gehinderd worden door boomwortels, en kan geen groot beeld krijgen vanaf de grond.
"Wat meer energie kost dan wat dan ook, is beweging, "Zei Egerstedt. "Verhuizen is veel duurder dan voelen of denken. Voor omgevingsrobots, je moet alleen bewegen als het echt moet. We moesten nadenken over hoe dat zou zijn."
voor Pauli, die een verscheidenheid aan dieren in het wild bestudeert, werken met Egerstedt om SlothBot tot leven te laten komen, was bevredigend.
"Het is geweldig om een robot te zien die is geïnspireerd door de biologie van luiaards, " zei hij. "Het was leuk om te vertellen hoe luiaards en andere organismen die lange tijd in deze ecosystemen leven, hun leven leiden. Het zal interessant zijn om robots te zien die een afspiegeling zijn van wat we zien in natuurlijke ecologische gemeenschappen."
 Hoe Simple Vs. uit te leggen Gefractioneerde destillatie
Hoe Simple Vs. uit te leggen Gefractioneerde destillatie - Metaalgekatalyseerde toevoeging van verzadigde koolstof aan CC-bindingen:een relevante reactie voor de synthese van type II polyketiden
- Hoe citroenzuur te maken
- De reactiviteit van zwarte fosfor reguleren door middel van beschermende chemie
- Hoe te verwijderen Ethanol van Gasoline
- Pesticiden en industriële verontreinigende stoffen gevonden in sneeuw bovenop Arctische gletsjers
- NASA analyseert doorweekt potentieel voor herboren tropische depressie in de Golf van Mexico
- Golven hebben wisselende invloed op het zee-ijs in de Zuidelijke Oceaan, studie vondsten
- Kleine aardbevingsclusters kunnen zich niet verbergen voor AI
- Nieuwe studie onderzoekt de effecten van fracking op de watervoorziening wereldwijd
Hoofdlijnen
- Bodembedekkers verhogen de vernietiging van onkruidzaden in velden, licht werpen op interacties met roofdieren
- Science Project on Why Bones krijgt Rubbery in Azijn
- Cellen puilen uit om door barrières te persen
- Stijgende temperaturen veranderen grote populatie zeeschildpadden vrouw
- Hoe hersenspoeling werkt
- Parasieten en gastheren kunnen anders reageren op een warmere wereld
- Australische honden getraind om bedreigde diersoorten op te sporen
- Zangvogelpopulaties kunnen wijzen op problemen in noordwestelijke bossen
- Gebruik van microscopen in Science
- China prijst technische hoogstandjes van nieuwe internationale luchthaven

- Afvalwaterzuiveringsinstallaties kunnen duurzame bioraffinaderijen worden

- Technische ideeën in het openbaar testen? San Francisco zegt vergunning krijgen

- Onderzoek naar het zelfaandachtsmechanisme achter op BERT gebaseerde architecturen

- Volocopter krijgt veiligheidsknik als duw voor luchttaxi's van de toekomst


 De stad Koh Ker was eeuwenlang langer bezet dan eerder werd gedacht
De stad Koh Ker was eeuwenlang langer bezet dan eerder werd gedacht- Studie geeft nieuw inzicht in waarom sterrenstelsels stoppen met het vormen van sterren
- Op zoek naar oude regenwouden door middel van moderne zoogdierdiëten
- Percepties over wat er nodig is om te slagen in STEM-gebieden kunnen vrouwen buiten de deur houden
- Natuurkundigen melden een manier om donkere materie te horen
- Nanosponzen nemen keer op keer olie op
- Temperatuur en zoutgehalte van oude meren nauwkeuriger meten
- SpaceX Starship-rakettest eindigt in een nieuwe mislukking:Musk
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | French |

-
Wetenschap © https://nl.scienceaq.com
