Wetenschap
Met een hop, een sprong en een sprong, hoogvliegende robot springt gemakkelijk over obstakels

Onderzoekers van de Universiteit van Californië, Berkeley, onthulde Salto de springrobot voor het eerst in 2016. Nu, ze hebben de robot uitgerust met een hele reeks nieuwe vaardigheden, waardoor het de mogelijkheid heeft om op zijn plaats te stuiteren als een pogo-stick en door hindernisbanen te springen als een behendigheidshond. Salto kan zelfs korte uitstapjes naar buiten maken, aangedreven door een radiocontroller. Credit:UC Berkeley-foto door Stephen McNally
Toppen op minder dan een voet, Salto de robot ziet eruit als een Star Wars imperial walker in het klein. Maar laat je niet misleiden door zijn grootte - deze kleine robot heeft een machtige veer in zijn stap. Salto kan in een enkele sprong meer dan drie keer zo hoog springen.
Onderzoekers van de Universiteit van Californië, Berkeley, onthulde voor het eerst de hoogvliegende capaciteiten van Salto in 2016. Nu, ze hebben de robot uitgerust met een hele reeks nieuwe vaardigheden, waardoor het de mogelijkheid heeft om op zijn plaats te stuiteren als een pogo-stick en door hindernisbanen te springen als een behendigheidshond. Salto kan zelfs korte uitstapjes maken op de campus, aangedreven door een radiocontroller.
De onderzoekers hopen dat Salto de ontwikkeling van kleine, behendige robots die door puin kunnen springen om te helpen bij zoek- en reddingsmissies. Ze zullen de nieuwe vaardigheden van de robot vandaag (dinsdag, 21 mei) op de internationale conferentie over robotica en automatisering 2019 in Montreal.
"Kleine robots zijn echt geweldig voor veel dingen, zoals rondrennen op plaatsen waar grotere robots of mensen niet passen. Bijvoorbeeld, in een rampscenario, waar mensen vast kunnen komen te zitten onder het puin, robots kunnen erg handig zijn om mensen te vinden op een manier die niet gevaarlijk is voor reddingswerkers en misschien zelfs sneller zijn dan reddingswerkers zonder hulp hadden kunnen doen, ", zegt Justin Yim, afgestudeerd roboticastudent aan UC Berkeley. "We wilden dat Salto niet alleen klein was, maar ook in staat om heel hoog en heel snel te springen, zodat het door deze moeilijke plaatsen kon navigeren."

Onderzoekers van de Universiteit van Californië, Berkeley, onthulde voor het eerst Salto de springrobot in 2016. Nu, ze hebben de robot uitgerust met een hele reeks nieuwe vaardigheden, waardoor het op zijn plaats kan stuiteren als een pogo-stick en door obstakels kan springen als een behendigheidshond. Hier, het stuitert van helling naar helling in een indoorbaan. Credit:UC Berkeley-foto door Stephen McNally
Yim werkt samen met Ronald Fearing, een professor elektrotechniek en computerwetenschappen aan UC Berkeley, wiens Biomimetic Millisystems Lab onderzoekt hoe de mechanica van dierenbewegingen kan worden toegepast om wendbare robots te creëren.
Fearing's lab staat bekend om het bouwen van op insecten geïnspireerde robots die veilig over lastige oppervlakken kunnen kruipen die te glad of te ruw zijn voor een robot op wielen om te navigeren. Bij het ontwerpen van Salto, wat staat voor "saltatorial locomotie op terreinobstakels, "Vrees wilde in plaats daarvan een robot maken die van plaats naar plaats bewoog door te springen.
single van Salto, krachtige poot is gemodelleerd naar die van de galago, of Senegalese bushbaby. De kleine, De spieren en pezen van de boombewonende primaat slaan energie op op een manier die het kwieke schepsel de mogelijkheid geeft om meerdere sprongen in een kwestie van seconden aan elkaar te rijgen. Door een reeks snelle sprongen te koppelen, Salto kan ook door complex terrein navigeren, zoals een hoop puin, dat misschien onmogelijk over te steken is zonder te springen of te vliegen.
"In tegenstelling tot een sprinkhaan of krekel die opwindt en één sprong maakt, we kijken naar een mechanisme waar het kan springen, springen, springen, springen, "Vrees zei. "Hierdoor kan onze robot van locatie naar locatie springen, wat het dan de mogelijkheid geeft om tijdelijk te landen op oppervlakken waar we misschien niet op kunnen zitten."
Drie jaar geleden, Het ontwerpteam van Salto demonstreerde hoe de robot een sprong kon maken en dan onmiddellijk hoger kon springen door van een muur af te ketsen. waardoor het 's werelds meest verticaal behendige robot is. Vanaf dat moment, Yim heeft het voortouw genomen bij het ontwerpen van geavanceerde besturingssystemen waarmee Salto steeds complexere taken kan uitvoeren, zoals op zijn plaats stuiteren, een hindernisbaan navigeren of een bewegend doel volgen.
Yim heeft Salto ook uitgerust met nieuwe technologie waarmee het zijn eigen lichaam kan "voelen", hem vertellen welke hoek hij wijst en de buiging van zijn been. Zonder deze capaciteiten, Salto is opgesloten in een kamer in een van Berkeley's technische gebouwen, waar motion capture-camera's de exacte hoek en positie volgen en die gegevens terugsturen naar een computer, die snel de cijfers vermaalt om Salto te vertellen hoe hij zich moet richten op zijn volgende sprong.
Nu Salto een gevoel van zichzelf en zijn eigen beweging heeft, de robot kan deze berekeningen zelf maken, waardoor Yim de robot naar buiten kan brengen en een joystick en radiocontroller kan gebruiken om hem te vertellen waar hij heen moet.
"Motion capture is geweldig om de robot heel precies rond te laten springen in een gecontroleerde omgeving, en het geeft ons tonnen echt geweldige gegevens. Het probleem is, we kunnen dit niet weghalen en ergens anders gebruiken, omdat het veel tijd kost om al deze camera's op te zetten, " zei Yim. "We wilden de robot echt kunnen uitschakelen en rondspringen. En om dat te doen, we hadden de robot nodig om te kunnen berekenen waar hij is en wat hij doet - gewoon met de computer op zijn eigen lichaam."
Salto kan nu gaan wandelen op de campus van Berkeley, waar het met succes over trottoirs heeft gemanoeuvreerd, metselwerk en gras. De wiskundige modellen die dit voor Salto mogelijk maken, kunnen ook worden gegeneraliseerd om de beweging van andere soorten robots te regelen, zei Yim.
"Door te begrijpen hoe deze dynamiek voor Salto werkt, met zijn massa en grootte, dan kunnen we hetzelfde soort begrip uitbreiden naar andere systemen, en we zouden andere robots kunnen bouwen die groter of kleiner zijn of een andere vorm of gewicht hebben, ' zei Yim.
In de toekomst, Fearing hoopt de mogelijkheden voor hoppende robots te blijven onderzoeken.
"Salto is onze eerste stap naar robots die rondspringen, "Vrees zei. "We kunnen Salto uitbreiden om een toe te voegen? de? mogelijkheid om, bijvoorbeeld, grijp takken om te landen en lanceer vanaf die dingen. Dus, Salto begint met een heel eenvoudig mechanisme. Het is maar één been. Het biedt een basis voor meer gecompliceerde robots die ook zeer dynamisch kunnen zijn en veel kunnen stuiteren."
 The Great Rift Valley Vertegenwoordigt welk type geologische activiteit?
The Great Rift Valley Vertegenwoordigt welk type geologische activiteit? - Het leven gaat door onder een wolk van smog in Mexico-Stad
- Afnemende sneeuwbedekking zorgt voor toenemende methaanproductie in bevroren meren
- Stimulansen kunnen de kosten van biobrandstofmandaten omzetten in milieuvoordelen
- Studie van oude koralen in Indonesië onthult langzaamste aardbeving ooit gemeten
Hoofdlijnen
- Waarom zijn de roze meren van Australië roze?
- Waarom sommige mensen flauwvallen als ze bloed zien
- Hands-on Science-activiteiten over bloed
- Genetische modificatie: definitie, soorten, proces, voorbeelden
- Wat zijn de twee prokaryotische rijken?
- Wat doet een bladcel?
- Wat volgt glycolyse als zuurstof aanwezig is?
- Genomische studie onderzoekt de evolutie van zachte killer-bijen in Puerto Rico
- Effecten van mobiele telefoons op studenten
- De volgende iPhones van Apple zullen ontwerpelementen overnemen van de nieuwste iPad Pro, rapport zegt

- Algoritmen nemen het stuur over

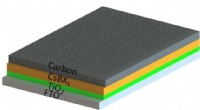
- Onderzoekers doen baanbrekende ontdekking in rekbare elektronische materialen
- Mooie toekomst voor zonneceltechnologie
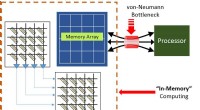
- Het brein van computers een boost geven met minder verspilde energie

 Britse wijnbouwgebieden om champagne te evenaren onthuld
Britse wijnbouwgebieden om champagne te evenaren onthuld- Uit onderzoek blijkt hoeveel CEO's belangrijk zijn voor de prestaties van een bedrijf
- Wie heeft de controle? Onderzoeker onderzoekt waarom het zo moeilijk is om de verbinding met sociale media te verbreken
- Zonnestormen veroorzaken verrassende verschijnselen dicht bij de aarde
- Lasers opnieuw bedraad:wetenschappers vinden een nieuwe manier om nanodraadlasers te maken
- Ontdekking van de oudste pijl en boog technologie in Eurazië
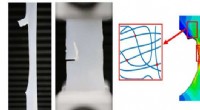
- Onderzoekers zien in realtime scheurvorming in 3D-geprint wolfraam
- Medisch centrum in Alabama zegt dat patiëntendossiers zijn gehackt
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
