Wetenschap
Een wrijvingsreductiesysteem voor vervormbare robotvingers
Een illustratie van het vloeiende vingertopconcept van de onderzoekers. Krediet:Mizushima et al.
Onderzoekers van Kanazawa University hebben onlangs een wrijvingsreductiesysteem ontwikkeld op basis van een smerende werking, die interessante zachte robotica-toepassingen kunnen hebben. hun systeem, gepresenteerd in een paper gepubliceerd in Taylor &Francis' Geavanceerde robotica logboek, zou kunnen helpen bij de ontwikkeling van robots die objecten efficiënt kunnen manipuleren onder zowel droge als natte omstandigheden.
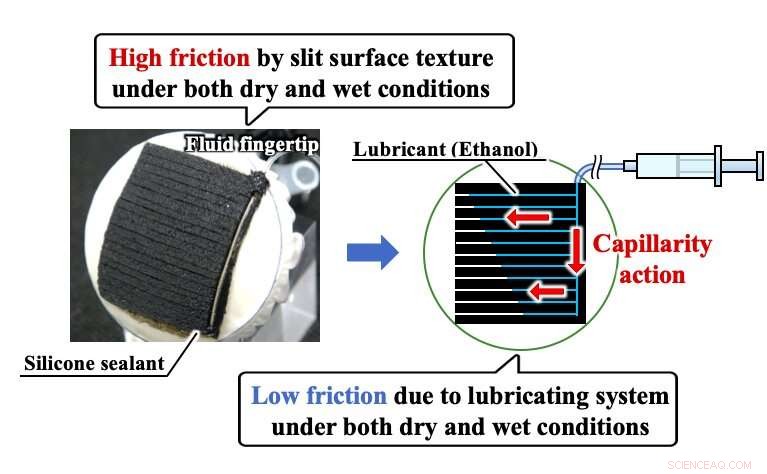
"Onze eerder ontwikkelde oppervlaktetextuur of huid voor zachte robothanden zorgt voor hoge wrijving onder zowel droge als natte omstandigheden, "Tetsuyou Watanabe, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Echter, deze hoge wrijving maakt verschillende manipulatiestijlen (inclusief loslaten en glijden) moeilijk. In sommige gevallen, een vastgegrepen object plakt aan het oppervlak. Om dit probleem op te lossen, we hebben een nieuw wrijvingsreductiesysteem ontwikkeld dat gebruik maakt van smeermiddelen."
Bij het ontwikkelen van hun systeem, Watanabe en zijn collega's lieten zich inspireren door menselijk gedrag. Ze merkten dat mensen in supermarkten vaak hun vingers likken om plastic zakken of containers te openen. Soortgelijke acties worden ook uitgevoerd bij het oppakken van vellen papier of het omslaan van de pagina's in een boek.
De onderzoekers ontdekten dat dit 'vingerlikken'-gedrag vooral veel voorkomt bij mensen van middelbare leeftijd of ouderen, aangezien veroudering doorgaans leidt tot een drogere huid. Jongere mensen, anderzijds, hoeven vaak hun vingers niet af te likken bij het manipuleren van plastic of papier, omdat ze de wrijving van de huid automatisch kunnen regelen via de zweetmechanismen van hun lichaam.
"Natuurlijk, het doel van vingers likken is om hoge wrijving te krijgen, en totaal verschillend van ons doel (d.w.z. vermindering van wrijving), "Zei Watanabe. "Echter, normaal gesproken is het doel van smeermiddelen om wrijving in mechanische systemen te verminderen. Dus, we hebben de mogelijkheid overwogen van een wrijvingsreductiesysteem dat vergelijkbaar is met zweetcontrole bij mensen."
De onderzoekers construeerden een robotachtige vingertop met spleten in het oppervlak. Wanneer smeermiddelen (bijv. ethanol) rond de grenzen van deze spleten worden geïnjecteerd, ze doordringen het hele oppervlak, via een capillaire werking.
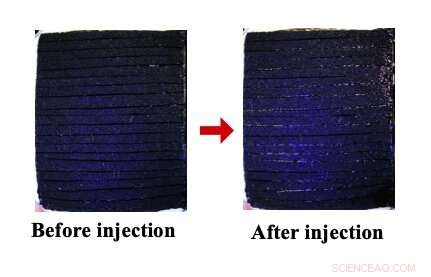
De vingertop voor en nadat er ethanol in wordt geïnjecteerd. Krediet:Mizushima et al.
"We gebruikten het dunne oppervlak inclusief textuur, en het systeem werkt niet alleen op stijve maar ook op vervormbare lichamen zonder verlies van aanpassingsvermogen aan de vorm van een object, "Zei Watanabe. "Daarom, het belangrijkste voordeel van ons systeem is dat oppervlaktewrijving kan worden gecontroleerd met behoud van de vervormbaarheid en aanpasbaarheid van het oppervlak. Dit betekent dat het ontwikkelde systeem kan worden bevestigd op robots met zachte lichamen."
In recente jaren, het gebruik van zachte lichamen wordt steeds populairder in robotica, vanwege hun hoge vervormbaarheid en aanpassingsvermogen. Bijvoorbeeld, zachte robots kunnen vrijer in hun omgeving bewegen, zonder grote schade aan te richten bij het raken van muren of obstakels. In aanvulling, zachte robothanden kunnen zich aanpassen aan de vorm van een object terwijl ze het vastpakken, wat meer geavanceerde manipulatiestrategieën mogelijk maakt.
"Een ander belangrijk voordeel van ons systeem is dat het zowel onder droge als natte omstandigheden werkt, " Watanabe toegevoegd. "Het is daarom erg handig voor robots die in menselijke omgevingen werken, omdat het huishouden onder beide omstandigheden wordt uitgevoerd."
De onderzoekers plaatsten hun systeem in een robotvingertop en evalueerden de prestaties ervan in een reeks experimenten waarbij objecten werden vastgepakt en losgelaten. Hun bevindingen suggereren dat de smeertechniek die ze hebben ontwikkeld de wrijving onder zowel natte als droge omstandigheden effectief kan verminderen.
"Zoals je je kunt voorstellen aan het menselijk gedrag van vingers likken, water kan wrijving verhogen en in sommige gevallen kan de huid aan oppervlakken blijven kleven, "Zei Watanabe. "In tegenstelling, ethanol vermindert wrijving. De belangrijke factor voor wrijvingsvermindering is de spreidingscoëfficiënt die nauw samenhangt met capillaire krachten (d.w.z. oppervlaktespanning)."
In deze context, een lage capillaire kracht brengt de gemakkelijke diffusie van vloeistof door een oppervlak met zich mee. Met behulp van ethanol, die een lage capillaire kracht heeft, de onderzoekers waren in staat om wrijving te verminderen en het smeermiddel gemakkelijk over het hele oppervlak van de vingertop te verspreiden. Een ander voordeel van ethanol is de hoge vluchtigheid, wat de tacttijd aanzienlijk verkort.
"We hebben ook opgemerkt dat om de functie van ons systeem te vergemakkelijken, het oppervlak mag niet helemaal glad zijn, " Watanabe toegevoegd. "Een oppervlak dat een beetje ruw of oneffen is, kan zijn functie verder verbeteren."
Robots kunnen binnenkort mensen in verschillende omgevingen ondersteunen, bijvoorbeeld helpen met het huishouden of het verlenen van verpleegkundige zorg. Aangezien deze taken over het algemeen onder zowel droge als natte omstandigheden worden uitgevoerd, het wrijvingsreductiesysteem van de onderzoekers zou zeer nuttig kunnen zijn.
"Het hanteren en manipuleren van objecten zijn de belangrijkste doelen voor ons onderzoek en de taken met inbegrip van dergelijke acties zijn de gerichte toepassingen, "Watanabe zei. "Een paar voorbeelden zijn het vouwen van kleding, Koken, wassen, enzovoort."
In de toekomst, het smeersysteem ontwikkeld door Watanabe en zijn collega's zou de ontwikkeling van zachte robots kunnen helpen die objecten effectiever kunnen manipuleren, in zowel droge als natte omgevingen. De onderzoekers plannen nu verder onderzoek om de mogelijke toepassingen van hun systeem af te bakenen en te verbreden.
"Momenteel, we hebben alleen vingertoppen gecombineerd met ons systeem, "Zei Watanabe. "Als volgende stap, we willen ons wrijvingscontrolesysteem toepassen op een robothand. Bovendien, de toepassingen voor het systeem zijn nog onduidelijk, daarom willen we geschikte methodologieën schetsen voor echte operaties, zoals vouwen of koken."
© 2019 Wetenschap X Netwerk
 Delignificatie van houtmonsters met p-tolueensulfonzuur als recyclebare hydrotroop
Delignificatie van houtmonsters met p-tolueensulfonzuur als recyclebare hydrotroop- Upcyclingproces brengt nieuw leven in oude jeans
- Machine learning voorspelt mechanische eigenschappen van poreuze materialen
- Hoe wordt ijzer van staal gemaakt?
- Nieuwe methodologie helpt bij het bestuderen van veelbelovende gerichte steigers voor medicijnafgifte
- Hoe klimaatverandering de foerageerpatronen van prehistorische mensen in Indonesië beïnvloedde
- Zware stormen kunnen oudere rioleringsstelsels overspoelen, veroorzaakt een piek in door rioolwater overgedragen bacteriële en virale infecties
- De keerzijde van de Bitcoin:hoe blockchain duurzame energie kan ondersteunen
- Regenwoud Weer & Klimaat
- Klimaatgasbudgetten overschatten de methaanuitstoot uit de Noordelijke IJszee sterk
Hoofdlijnen
- Muizen helpen bij het vinden van gen voor slechte adem
- Tot 50% minder fytosanitaire producten nodig om wijnstokziekten te behandelen
- Cytoplasma: functie en feiten
- Dierlijke versus plantencellen: overeenkomsten en verschillen (met grafiek)
- Wat doet een skelet bewegen?
Het skelet is het starre raamwerk dat een lichaam zijn algemene vorm geeft, maar op zichzelf is het niet in staat tot beweging. Wat een skelet doet bewegen is de samentrekking en ontspanning van spieren die ermee verbon
- 3 Eigenschappen van een cel
- Dierenartsen waarschuwen dat antivries giftig is voor huisdieren en mensen
- Sumatraanse tijgers op weg naar herstel in gevaar UNESCO-werelderfgoed
- Waar ontwikkelt een Zygote in planten zich in?






 In het opwarmende Noordpoolgebied, grote rivieren vertonen verrassende veranderingen in koolstofchemie
In het opwarmende Noordpoolgebied, grote rivieren vertonen verrassende veranderingen in koolstofchemie- Wiskundige ontdekt belangrijk aspect dat kenmerkende patronen van de zebravis onderstreept
- ExaNoDe bouwt baanbrekend 3D-prototype voor rekeneenheden voor exascale
- Waarom komt waterstofperoxide in een bruine fles?
- Thermo-getriggerde afgifte van een genoombewerkingsmachine door gemodificeerde gouden nanodeeltjes voor tumortherapie
- Onderzoekers ontwikkelen een nieuw apparaat om gluten efficiënter te detecteren
- Startup bevordert koolstofvrije brandstoffen via UConn-partnerschap
- Senator Russell ziet een UFO
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
