Wetenschap
Een nieuwe methode om robuuste voortbeweging in een viervoetige robot mogelijk te maken

Illustratie van de robot die door de onderzoekers wordt gebruikt. Krediet:Nordmoen et al.
Een van de belangrijkste uitdagingen voor robotica-onderzoek is de ontwikkeling van effectieve en veerkrachtige besturingssystemen, waarmee robots door verschillende omgevingen kunnen navigeren en onverwachte gebeurtenissen kunnen opvangen. Onderzoekers van de Universiteit van Oslo hebben onlangs een geëvolueerde belichaamde fasecoördinatietechniek ontwikkeld voor robuuste viervoetige robotbeweging. Hun werk, gepubliceerd op arXiv, werd gedeeltelijk gesponsord door de Onderzoeksraad van Noorwegen.
"De motiverende factor voor ons was de observatie dat sommige robotgedragingen die we in simulatie hebben getraind, niet goed functioneerden wanneer ze werden getest op de echte robot, "Jørgen Nordmoen, een van de bij het onderzoek betrokken onderzoekers, vertelde TechXplore. "Deze observatie is een bekende uitdaging, vaak 'de realiteitskloof' genoemd, ' en we wilden zien of het gebruik van sensorgegevens zou kunnen helpen om deze uitdaging te overwinnen."
Om de 'reality gap' die vaak wordt waargenomen in robotica-onderzoeken, effectief te verkleinen, Nordmoen en zijn collega's wilden centrale patroongeneratoren (CPG's) combineren met feedback van het lichaam en sensoren van de robot. CPG's zijn een populaire methode voor het genereren van ritmische golvingen of motorpatronen in robots, die kan worden gebruikt als onderbouwing van beweging. Kunstmatige CPG's zijn geïnspireerd op het ruggenmerg van dieren, waarvan bekend is dat ze neuronen bevatten die ritmische signalen genereren bij afwezigheid van sensorische informatie.
"CPG's zijn relatief eenvoudig te trainen, echter, ze nemen zelf geen informatie over de buitenwereld op, "Zei Nordmoen. "Onze belangrijkste doelstellingen waren om te zien of we met succes een complex CPG-netwerk konden combineren met belichaamde fasecoördinatie en of de integratie van sensorgegevens het gedrag van de robot in de echte wereld zou kunnen verbeteren."
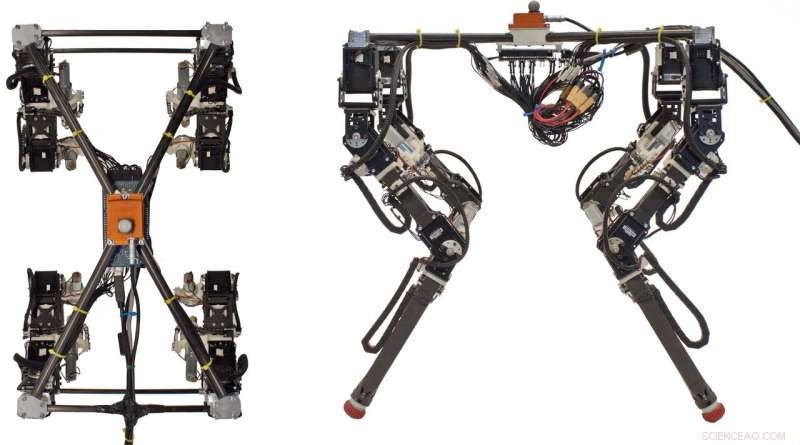
Beelden van de robot die de onderzoekers gebruikten. Krediet:Nordmoen et al.
Belichaamde fasecoördinatietechnieken werken door de hoeveelheid druk te voelen die door de robot in elk van zijn voeten wordt uitgeoefend, deze meting gebruiken om de synchronisatie van zijn benen te regelen. In hun studie hebben de onderzoekers gebruikten een minimalistische benadering genaamd TEGOTAE, die sensorfeedback gebruikt voor opkomende fasekoppeling tussen de benen van de robot.
Gebruikelijk, in pootrobots, elk been is expliciet gecoördineerd met de andere, wat betekent dat een been altijd de relatieve positie van andere benen kent. In tegenstelling tot, in de belichaamde fasecoördinatieaanpak die is bedacht door Nordmoen en zijn collega's, elk been is ontkoppeld van de andere en het lichaam zelf dwingt impliciet de synchronisatie tussen de benen af. De door de onderzoekers toegevoegde voetdruksensor maakt impliciete synchronisatie mogelijk, uiteindelijk de coördinatie van de robot verbeteren.
"Onze methode gebruikt een complexere CPG dan andere benaderingen, gebruik maken van belichaamde fasecoördinatie en het uitvoeren van de experimenten op een complexere robot, " zei Nordmoen. "Bovendien, we hebben de CPG getraind met behulp van een evolutionair optimalisatie-algoritme, die samen met de belichaamde fasecoördinatie ervoor zorgt dat het loopritme zich automatisch aanpast aan de robot en de omgeving."
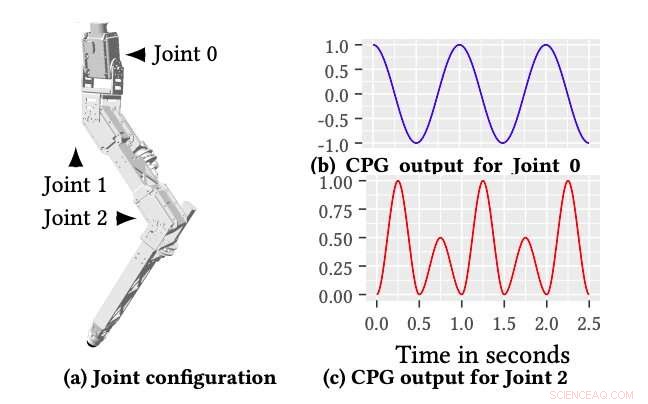
(a) toont een visuele weergave van een been van de robot met gemarkeerde gewrichten. (b) toont een voorbeeld van een besturingscurve voor Joint 0 en Joint 1 terwijl (c) een voorbeeld van een besturingscurve voor Joint 2 toont. Credit:Nordmoen et al.
In hun studie hebben de onderzoekers pasten hun methode toe op DyRET, een vierpotige robot met een zoogdiermorfologie. Ze trainden eerst de viervoetige robot in simulaties, en vervolgens hun tests overgebracht naar de echte wereld om te verifiëren of de training effectief was. Hierdoor konden ze hun techniek evalueren voordat ze deze in real-world scenario's toepast zonder schade aan de robot te veroorzaken.
"Practisch gesproken, ons werk kan leiden tot robots met poten die zich beter kunnen aanpassen aan hun omgeving, dus omgaan met verschillende omgevingen, "Zei Nordmoen. "Dit omvat het faciliteren van de overdracht van robotcontrollers van simulatie naar de echte wereld. Zoals we in de krant schreven, robots met poten hebben de mogelijkheid om te helpen op de voorwaarden van de gebruiker met weinig aanpassing die de gebruiker nodig heeft in vergelijking met robots op wielen."
De door Nordmoen en zijn collega's bedachte techniek zou de ontwikkeling van robots met robuustere voortbewegingsvaardigheden kunnen vergemakkelijken. In de toekomst, andere onderzoekers zouden de aanpak in hun robots kunnen integreren of inspiratie kunnen putten uit dit onderzoek om vergelijkbare technieken te ontwikkelen. Volgens Nordmoen, de problemen die gepaard gaan met het integreren van sensorfeedback in pootrobots en de eenvoud van deze nieuwe belichaamde fasecoördinatiebenadering kunnen een goed startpunt zijn voor toekomstig onderzoek.
"We werken momenteel aan een beter begrip van het mechanisme dat ten grondslag ligt aan de belichaamde fasecoördinatie, " voegde hij eraan toe. "Hierdoor kunnen we hopelijk het concept verbeteren en betere bewegingsstrategieën genereren. In aanvulling, we willen graag zien hoe de belichaamde fasecoördinatie wordt beïnvloed als de robot zelf verandert. Met onze unieke robot, DyRET, we hebben de mogelijkheid om de morfologie van de robot te veranderen en kunnen testen hoe dergelijke veranderingen onze aanpak zouden beïnvloeden."
© 2019 Wetenschap X Netwerk
 Waarom is het periodiek systeem gerangschikt in kolommen en rijen?
Waarom is het periodiek systeem gerangschikt in kolommen en rijen? - Onderzoekers ontwikkelen een unieke methode om poedercomposieten te maken
- Nylon als bouwsteen voor transparante elektronische apparaten?
- Spelveranderende PanDDA-methode onthult voorheen verborgen 3D-structuurgegevens
- Hoe maak je je lotion dikker
Hoofdlijnen
- Hoe glycolyse aan kinderen te leren
- Lood visgerei kan een bedreiging vormen voor de populaties van duikers
- Wat is een regeling in de microbiologie?
- Mexico zegt dat de bedreigde vaquita-bruinvis in gevangenschap is gestorven
- Is de tweekamerige geest geëvolueerd om het moderne menselijke bewustzijn te creëren?
- Waarom stijgt je lichaamstemperatuur als je een virus hebt zoals griep?
- Bacteriën Levenscyclus
- Wat is vriesbreuk en waarom is het nuttig in celbiologie?
- Nucleus: definitie, structuur en functie (met diagram)
- YouTube volgt Amazon in bioscopen

- Merkel:1 miljoen autolaadpunten in Duitsland in 2030

- De integriteit van de Amerikaanse verkiezingen hangt af van bedrijven met een beveiligingsprobleem

- VK schrapt plannen voor nieuw onderzoek naar misstanden in de media

- De volgende iPhones, Apple Watch lekt terwijl Apple zich voorbereidt op het evenement van 12 september


 Zweden brouwen al bier sinds de ijzertijd, nieuw bewijs bevestigt
Zweden brouwen al bier sinds de ijzertijd, nieuw bewijs bevestigt- Typen North Carolina Turtles
- Gouden nanosterren en immunotherapie vaccineren muizen tegen kanker
- Team gebruikt biomimicry van vleermuizen om drones te helpen navigeren in het donker, stof of rook
- Ontdekking van het dieet van het fossiel Theropithecus oswaldi gevonden in Cueva Victoria in Spanje
- De 1808 Zweden UFO-ontmoeting
- Diversiteitssemantiek verschuift hogere ed inclusiviteit weg van studenten van kleur
- De groene groeitijgers van de 21e eeuw identificeren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | Dutch | Danish | Norway | Portuguese | German |

-
Wetenschap © https://nl.scienceaq.com
