Wetenschap
Een nieuwe robot die eigendomsrelaties en normen kan leren
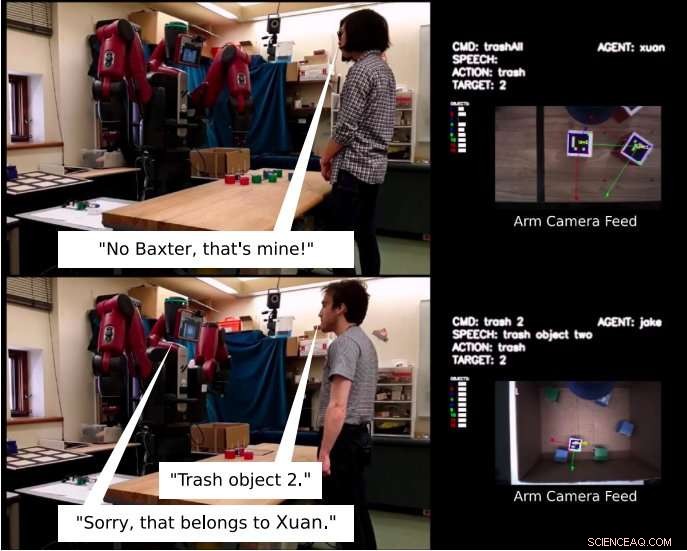
Eigenaarschap leren via mens-robot interactie. Boven:De robot wordt halverwege de actie door Xuan verbaal gestopt om object 2 weg te gooien. Onder:Nadat hij de eigendomsrelaties en actierechten heeft geleerd door interactie met Xuan, de robot weigert Jake's verzoek om object 2 weg te gooien. Credit:Tan, Brawer &Scassellati.
Een team van onderzoekers van de Yale University heeft onlangs een robotsysteem ontwikkeld dat in staat is om leren en afleiden van eigendomsverhoudingen en normen. hun studie, voorgepubliceerd op arXiv, gaat in op enkele van de complexe uitdagingen die gepaard gaan met het aanleren van sociale normen aan robots en hoe u zich hieraan kunt conformeren.
Naarmate robots steeds vaker voorkomen, het is belangrijk dat ze zowel effectief als gepast met mensen kunnen communiceren. Een belangrijk aspect van menselijke interacties is het begrijpen en gedragen volgens sociale en morele normen, omdat dit een positieve co-existentie met anderen bevordert.
Eigendomsnormen zijn een reeks sociale normen die helpen om door gedeelde omgevingen te navigeren op manieren die meer rekening houden met anderen. Het aanleren van deze normen aan robots zou hun interacties met mensen kunnen verbeteren, waardoor ze onderscheid kunnen maken tussen tools die niet in eigendom zijn en tools die in eigendom zijn die tijdelijk met hen worden gedeeld.
"Mijn onderzoekslab richt zich op het bouwen van robots waarmee mensen gemakkelijk kunnen communiceren, "Brian Scassellati, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Een deel van dat werk is kijken hoe we machines kunnen leren over gemeenschappelijke sociale concepten, zaken die voor ons als mens essentieel zijn, maar niet altijd de onderwerpen zijn die de meeste aandacht trekken. Inzicht in objecteigendom, rechten, en douane is een van deze onderwerpen die niet echt veel aandacht heeft gekregen, maar van cruciaal belang zal zijn voor de manier waarop machines in onze huizen werken, scholen, en kantoren."
In de aanpak van Scassellati, Xuan Tan en Jake Brawer, eigendom wordt weergegeven als een grafiek van probabilistische relaties tussen objecten en hun eigenaren. Dit wordt gecombineerd met een database van op predikaten gebaseerde normen, die de acties beperken die de robot mag uitvoeren met behulp van eigendomsvoorwerpen.
"Een van de uitdagingen in dit werk is dat sommige manieren waarop we leren over eigendom, zijn door expliciete regels te horen (bijv. 'don't take my tools') en anderen worden geleerd door ervaring, "Scassellati zei. "Het combineren van deze twee soorten leren kan gemakkelijk zijn voor mensen, maar is veel uitdagender voor robots."
Het systeem dat door de onderzoekers is bedacht, combineert een nieuw incrementeel normleeralgoritme dat in staat is tot zowel eenmalig leren als inductie uit voorbeelden, met Bayesiaanse gevolgtrekking van eigendomsverhoudingen als reactie op schijnbare regelovertredingen en op waarneming gebaseerde voorspelling van de waarschijnlijke eigenaren van een object. Samen, deze componenten stellen het systeem in staat om eigendomsnormen en -relaties te leren die in verschillende situaties van toepassing zijn.
"De sleutel tot het werk dat Xuan en Jake deden, was het combineren van twee verschillende soorten machine learning-representatie, een die leert van deze expliciete, symbolische regels en een die leert van kleine stukjes ervaring, "Scassellati legde uit. "Het samen laten werken van deze twee systemen maakt dit uitdagend, en op het einde, wat dit tot een succes heeft gemaakt."
De onderzoekers evalueerden de prestaties van hun robotsysteem in een reeks gesimuleerde en real-world experimenten. Ze ontdekten dat het objectmanipulatietaken effectief kon voltooien waarvoor een verscheidenheid aan eigendomsnormen moest worden gevolgd, met opmerkelijke competentie en flexibiliteit.
De studie van Scassellati en zijn collega's biedt een opmerkelijk voorbeeld van hoe robots kunnen worden getraind om sociale normen af te leiden en te respecteren. Verder onderzoek zou vergelijkbare constructies kunnen toepassen op andere normgerelateerde capaciteiten en complexe situaties aanpakken waarin verschillende normen of doelen met elkaar in strijd zijn.
"We blijven kijken hoe we robots kunnen bouwen die op een natuurlijkere manier met mensen omgaan, en deze studie richt zich slechts op één aspect van dit werk, ' zei Scassellati.
© 2018 Wetenschap X Netwerk
 Een biljoen bomen niet genoeg om de klimaatcrisis op te lossen, critici zeggen:
Een biljoen bomen niet genoeg om de klimaatcrisis op te lossen, critici zeggen:- Waar is steenkool gevonden?
- Focussen op microplastic in honing- of biermaskers een veel groter probleem
- Drie op de vier zeggen dat klimaatomslagpunten dichtbij zijn
- Dorian versterkt tot categorie 3 storm als het de oostkust van de VS bedreigt
Hoofdlijnen
- Wat is een eencellige eukaryoot?
- Hoe maak je een 3-D DNA-model voor High School Biology
- Regenwormen kunnen zich voortplanten in Mars-bodemsimulant
- Haaienbioloog werkt samen met ruimtevaartingenieur om het gedrag van oceanische wittips te ontdekken
- Hoe maak je een 3D-tandmodel voor een schoolproject
- Welke sequenties zorgen ervoor dat DNA uitpakt en ademt?
- Beschermde zones van het Great Barrier Reef helpen vissen in zelfs licht geëxploiteerde gebieden
- Vergelijking voor glucosemetabolisme
- Waarom lopen mensen meestal in dezelfde richting?
- Automaker Tesla blijft een beursgenoteerd bedrijf CEO Musk zegt:

- Apple neemt 300 tijdschriften op in nieuwsservice voor abonnementen

- Algoritme simuleert met succes kleurperceptie voor #theDress-afbeelding

- Facebook-vacatureservice verspreidt zich naar meer landen

- Omgekeerde perovskiet-zonnecellen met een stroomconversie-efficiëntie van 22,3%


 Dentine-nanostructuren - een bovennatuurlijk fenomeen
Dentine-nanostructuren - een bovennatuurlijk fenomeen- Hoe waardeer je Aquamarine
- Beschermende factoren tegen suïcidaal gedrag onder zwarte studenten
- Amerikanen zijn gelukkiger in staten die meer uitgeven aan bibliotheken, parken en snelwegen
- Wetenschappers noemen vier belangrijke acties om de opwarming van de aarde te stoppen
- Rechtszaak dwingt Uber om te stoppen met werken in Colombia
- 'S Werelds enige deeltjesversneller voor kunst herleeft in Parijs
- Onderzoek verbindt stippen tussen oceaandynamiek, droogte en bossen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Norway | Danish |

-
Wetenschap © https://nl.scienceaq.com
