Wetenschap
Gedragsbomen gebruiken om de modulariteit van AUV-regelsystemen te verbeteren

De Autosub Long Range 6000 AUV van het National Oceanography Centre, voorafgaand aan inzet onder de FilchnerRonne Ice Shelf in Antarctica. Krediet:Sprague et al.
Onderzoekers van het Royal Institute of Technology (KTH) en het National Oceanography Centre hebben onlangs gedragsbomen (BT's) gebruikt om modulaire, veelzijdig, en robuuste besturingsarchitecturen voor kritieke missies. hun studie, voorgepubliceerd op arXiv, specifiek een BT-raamwerk toegepast op het besturingssysteem van autonome onderwatervoertuigen (AUV's).
AUV's zijn onderwatervoertuigen die voor verschillende missies worden gebruikt, zoals het detecteren en in kaart brengen van ondergedompelde objecten of het identificeren van navigatiegevaren en obstakels. Vanwege de beperkingen in hun communicatiebandbreedte en -bereik, deze voertuigen kunnen niet vertrouwen op tele-operatie-oplossingen die worden gebruikt door robots die vanuit de lucht of op de grond worden bediend.
Bovendien, AUV's worden over het algemeen ingezet in afgelegen gebieden, dus het herstellen ervan na een storing is vaak erg uitdagend en kostbaar. Om deze uitdagingen aan te gaan, AUV-regelsystemen moeten zowel robuust als veelzijdig zijn, het waarborgen van de veiligheid van het voertuig en het aanpassen aan verschillende situaties.
Het team van onderzoekers van KTH en het National Oceanography Centre probeerde deze uitdagingen aan te pakken met behulp van gedragsbomen (BT's), wiskundige modellen die de laatste tijd steeds populairder zijn geworden op het gebied van AI en robotica. BT's werden in eerste instantie ontwikkeld voor videogames om de modulariteit van NPC-besturingsstructuren (non-player character) te vergroten.
"Deze modulariteit zorgt voor efficiënt testen, incrementeel functionaliteitsontwerp en hergebruik van code, die allemaal behoorlijk voordelig zijn geweest in de videogame-industrie, "Christopher Iliffe Sprague, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Evenzo, we vinden deze aspecten heel nuttig bij het ontwerpen van robotachtige kunstmatige intelligentie (AI), de belangrijkste voordelen zijn dat gedragingen kunnen worden hergebruikt en getest in de context van ander gedrag op een hoger niveau zonder hun relatie met daaropvolgend gedrag te specificeren. Dit zijn opvallende voordelen ten opzichte van de meer conventioneel gebruikte eindige-toestandsmachines."
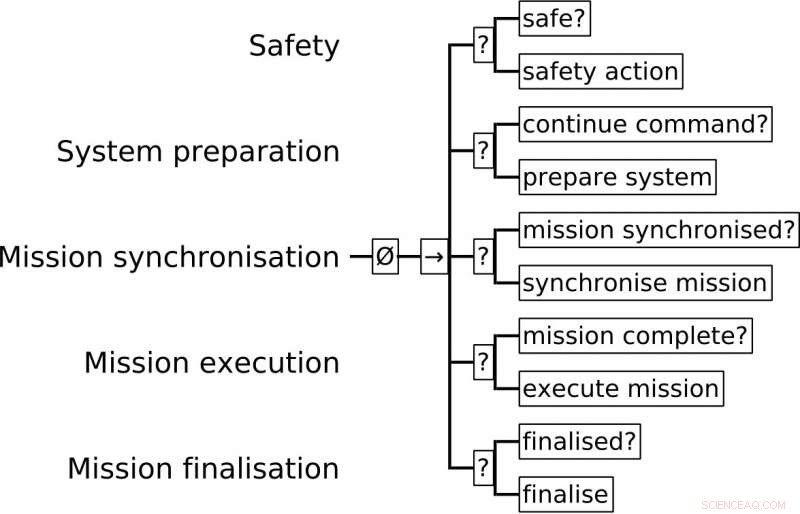
Algemeen missiekritisch systeem BT. Robuustheid wordt bereikt door altijd de veiligheidstoestand te controleren en waar nodig passende maatregelen te nemen. Krediet:Sprague et al.
Eigenlijk, BT's bieden een hiërarchische structuur voor het schakelen tussen verschillende taken. In bedrijfskritische systemen, zoals verkenningsvoertuigen of zelfrijdende auto's, een overstijgende doelstelling is vaak op te splitsen in meerdere deeltaken. Daarom, BT's kunnen helpen om deze taken beter te structureren en ertussen te schakelen.
"Met de inherente hiërarchische structuur van BT's, taken kunnen in verschillende mate van specificiteit worden opgesplitst, " legde Sprague uit. "In onze krant, we laten dit zien in de context van AUV's die de taak hebben een missie uit te voeren die wordt gedefinieerd door een reeks waypoints. We definiëren eerst in het algemeen een BT die voldoet aan de vereisten van het domein van het systeem (d.w.z. onderwatervoertuigen), verfijn vervolgens de BT verder door subtaken toe te voegen die betrekking hebben op specifieke doelstellingen."
Sprague en zijn collega's pasten dit proces van BT-verfijning toe op een AUV-missie die werd uitgevoerd door het National Oceanography Institute. Hun BT-framework maakte AUV-regelsystemen robuuster, toezicht houden op hun veiligheid alvorens over te gaan tot andere volgende taken. BT's maakten ook een grotere veelzijdigheid mogelijk, deeltaken prioriteren en het systeem flexibel tussen de taken laten schakelen.
"De belangrijkste van onze onderzoeksresultaten is dat we hebben laten zien hoe gedragsbomen eerst kunnen worden geschetst om aan algemene domeinvereisten te voldoen en vervolgens verder kunnen worden verfijnd voor specifieke missies, zonder de structuur van de oorspronkelijke boom op te offeren, "Sprague zei. "De cruciale conclusie hiervan is dat men bepaalde taakprioriteiten kan inboezemen, veiligheid het belangrijkste is, en bewaar ze, hoe missiespecifiek de boom ook wordt."
Sprague en zijn collega's hebben met succes de voordelen aangetoond van het gebruik van BT's voor het besturen van bedrijfskritieke systemen, zoals AUV's. Echter, de mate waarin taken kunnen worden geabstraheerd met behulp van BT's wordt nog steeds beperkt door het vermogen van mensen om taakdecomposities te identificeren. Hoewel taken in sommige gevallen intuïtief kunnen worden opgesplitst, in andere is het gedrag van het systeem veel complexer.
"We proberen nu automatisch BT's te synthetiseren van bijvoorbeeld, met het oog op optimalisatie, ' zei Sprague. 'In een andere krant, we onderzochten hoe we optimale controle kunnen implementeren met machine learning-methoden voor specifieke taken. We willen nu onderzoeken hoe we dergelijke methoden kunnen gebruiken om taken en algemene boomstructuren te identificeren en te optimaliseren. We vermoeden dat dit gedrag aan het licht zal brengen dat moeilijk te identificeren is door mensen."
© 2018 Wetenschap X Netwerk
 Biomining van de elementen van de toekomst
Biomining van de elementen van de toekomst- Nieuwe trucjes leren van zeesponzen, naturen meest onwaarschijnlijke civiel ingenieurs
- 3D-geprinte kunstmatige hoornvliezen vergelijkbaar met menselijke hoornvliezen
- Hoe een atoom in kaart te brengen
- De belangrijkste geurstoffen in 's werelds duurste rundvlees kunnen de aantrekkingskracht ervan helpen verklaren
Hoofdlijnen
- Dennen kappen:eerder vroeger dan later doen is beter voor fynbos
- Onderzoekers demonstreren een technische benadering om medicijnen te combineren, controle parasitaire wormen
- De Durian-industrie zou kunnen lijden zonder de bedreigde fruitvleermuis
- Koolwaterstofafbrekende schimmel geeft zijn geheimen prijs
- Daar is een studie over:het stenen tijdperk had net zoveel linkse mensen
- Genieten criminele psychopaten van de angst van andere mensen?
- Hoe succesvol te zijn in de microbiologie
- Do All Cells Have Mitochondria?
- Waarom zouden wetenschappers een hybride mens-koe-embryo willen creëren?
- Nieuwe Facebook AI-applicatie kan je ogen op een foto laten knipperen

- Amazon wil Alexa-assistent een groter deel van het leven van gebruikers maken

- Facebook, Twitter scherpt regels voor politieke advertenties aan

- Harige robot
- Werken op afstand zal het internet belasten en onderdelen moeten worden gerepareerd, deskundige zegt:


 Wat maakt de atmosfeer van Saturnus zo heet?
Wat maakt de atmosfeer van Saturnus zo heet?- LIGO weer online, klaar voor meer ontdekkingen
- Onderzoek naar schijfsterrenstelsels werpt licht op beweging van sterren
- Het gebruik van video's in het onderwijs kan de slagingspercentages van studenten verbeteren
- Door crisis getroffen Nissan benoemt hoofd van Chinese eenheid Makoto Uchida als nieuwe CEO
- Wetgevers in Californië komen dichter bij regionaal elektriciteitsnet (update)
- Groovy sleutel tot nanobuisjes in 2-D
- Kunnen kapitalisme en de planeet echt naast elkaar bestaan?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
