Wetenschap
Diepzeebeelden begrijpen met kunstmatige intelligentie
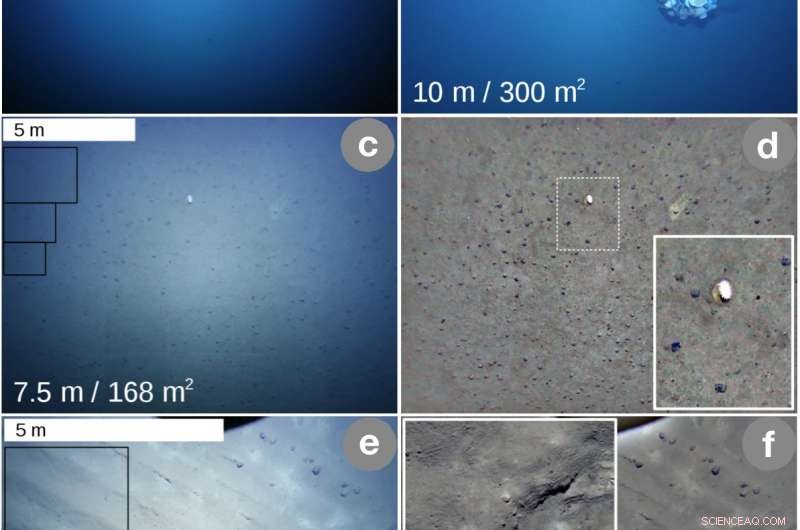
AUV ABYSS-beelden van de Pacifische zeebodem 10, 7,5, en 4 meter afstand. De bovenste twee afbeeldingen tonen een stationaire lander, ook een autonoom onderwaterapparaat De afbeeldingen c t/m f tonen mangaanknollen die herkenbaar zijn als donkere punten op de zeebodem. Krediet:AUV-Team/GEOMAR
De evaluatie van zeer grote hoeveelheden data wordt steeds relevanter in oceaanonderzoek. Duikrobots of autonome onderwatervoertuigen die zelfstandig metingen in de diepzee uitvoeren, kunnen nu grote hoeveelheden beelden met een hoge resolutie opnemen. Om deze beelden op een duurzame manier wetenschappelijk te evalueren, bij data-acquisitie moet aan een aantal voorwaarden worden voldaan, curatie en gegevensbeheer.
"De afgelopen drie jaar we hebben een gestandaardiseerde workflow ontwikkeld die het mogelijk maakt om grote hoeveelheden beeldgegevens systematisch en duurzaam wetenschappelijk te evalueren, " legt Dr. Timm Schoening uit van de Deep Sea Monitoring-werkgroep onder leiding van Prof. Dr. Jens Greinert van GEOMAR. Het autonome onderwatervoertuig ABYSS was uitgerust met een nieuw digitaal camerasysteem om het ecosysteem rond mangaanknobbeltjes in de Stille Oceaan te bestuderen. Met de op deze manier verzamelde gegevens, de workflow is voor het eerst ontworpen en getest. De resultaten zijn nu gepubliceerd in het internationale tijdschrift Wetenschappelijke gegevens .
De procedure is onderverdeeld in drie stappen:data-acquisitie, gegevensbeheer en gegevensbeheer, in elk van welke gedefinieerde tussenstappen moeten worden doorlopen. Bijvoorbeeld, het is belangrijk om aan te geven hoe de camera moet worden opgesteld, welke gegevens moeten worden vastgelegd, of welke verlichting nuttig is om een specifieke wetenschappelijke vraag te beantwoorden. Vooral, ook de metadata van de duikrobot moeten worden vastgelegd. "Voor gegevensverwerking, het is essentieel om de beelddata van de camera te koppelen aan de metadata van de duikrobot, " zegt Schoening. De AUV ABYSS, bijvoorbeeld, automatisch zijn positie geregistreerd, de diepte van de duik en de eigenschappen van het omringende water. "Al deze informatie moet worden gekoppeld aan de betreffende afbeelding, omdat deze belangrijke informatie biedt voor latere evaluatie, ", zegt Schoening. Een enorme taak:ABYSS verzamelde meer dan 500, 000 afbeeldingen van de zeebodem in ongeveer 30 duiken. Diverse programma's, die het team speciaal voor dit doel heeft ontwikkeld, zorgde ervoor dat de gegevens bij elkaar werden gebracht. Hier, onbruikbaar beeldmateriaal, zoals die met bewegingsonscherpte, was verwijderd.
Al deze processen zijn nu geautomatiseerd. "Tot dan, echter, een groot aantal tijdrovende stappen was nodig geweest, ", zegt Schoening. "Nu kan de methode worden overgedragen naar elk project, zelfs met andere AUV's of camerasystemen." Het op deze manier verwerkte materiaal werd vervolgens permanent beschikbaar gesteld voor het grote publiek.
Eindelijk, kunstmatige intelligentie in de vorm van het speciaal ontwikkelde algoritme "CoMoNoD" werd gebruikt voor evaluatie bij GEOMAR. Het registreert automatisch of er mangaanknobbeltjes in een foto aanwezig zijn, in welke maat en op welke positie. Vervolgens, bijvoorbeeld, de afzonderlijke afbeeldingen kunnen worden gecombineerd om grotere kaarten van de zeebodem te vormen. Het volgende gebruik van de workflow en de nieuw ontwikkelde programma's is al gepland:bij de volgende expeditie in het voorjaar van volgend jaar in de richting van mangaanknobbeltjes, de beoordeling van het beeldmateriaal vindt direct aan boord plaats. "Daarom nemen we enkele bijzonder krachtige computers mee aan boord, ", zegt Timm Schöning.
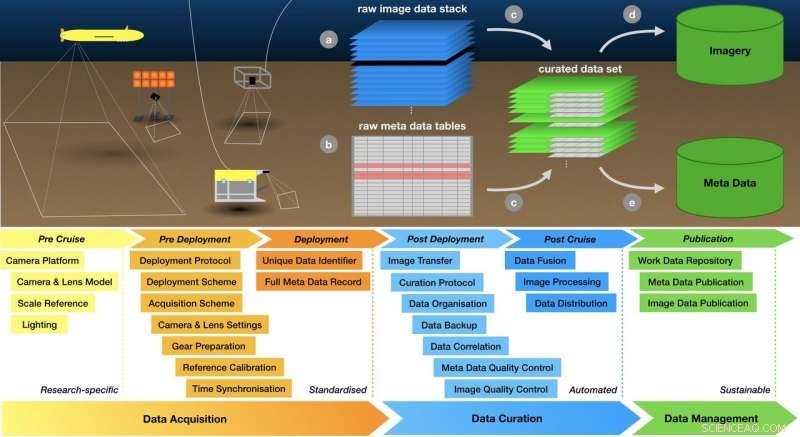
Schematisch overzicht van de workflow voor de analyse van beeldgegevens van data-acquisitie via curatie tot databeheer. Krediet:Timm Schoening/GEOMAR
 Onderzoekers vinden een manier om farmacoterrorisme te bestrijden
Onderzoekers vinden een manier om farmacoterrorisme te bestrijden- Oppervlaktewetenschap begrijpen om kwaliteitscosmetica te maken
- smartphone, blockchain-technologieën om nieuwe grenzen te openen in de strijd tegen voedselfraude
- Jane Austen-citaat gecodeerd in een polymeer
- Nieuwe configuratie van DNA ontdekt
Hoofdlijnen
- Getoonde chimpansees die spontaan om de beurt een cijferpuzzel oplossen
- Pompoengenomen gesequenced, ongewone evolutionaire geschiedenis onthullen
- Dysmorfologie
- Genotype: definitie, allelen en voorbeelden
- Nachtvliegers of dagjesmensen? Studie werpt licht op wanneer motten, vlinders zijn actief
- EU-lidstaten stemmen volgende maand over vijfjarige verlenging van onkruidverdelger
- Nieuwe manier om te voorkomen dat genetisch gemanipuleerde en ongewijzigde organismen nakomelingen produceren
- Wat is het laatste nieuws over de darmflora? Concordia-studenten microbiologie publiceren hun bevindingen
- Onderzoekers identificeren moleculaire motor die chromosomen transformeert
- DeepMind-baas geeft risico's van AI toe

- Facebook breidt nieuwe tool uit om nieuwswoestijnen te verkleinen

- Black Friday-razernij gaat wereldwijd - en niet iedereen is blij

- Het potentieel van supercomputers volledig benutten

- EU vertelt Luxemburg 120 miljoen euro terug te vorderen van Franse energiegigant


 Over het genereren van zonnekruiden en alfvenische golven
Over het genereren van zonnekruiden en alfvenische golven- Hoe een shoppingtrip een schuldgevoel wordt - en dan een vicieuze cirkel
- Het produceren van enkele fotonen uit een stroom van enkele elektronen
- Dit is de reden waarom het allergieseizoen je ellendig maakt
- Japans gehackte crypto-uitwisseling Coincheck uitgekocht
- Marslanding komt neer op de laatste 6 minuten van een reis van 6 maanden
- Wat is Ribonucleic Acid?
- Hoe wordt een monster voorbereid voor het bekijken onder een microscoop?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
