Wetenschap
Popcorn-robotica:het Cornell-team verkende verwarmde korrels
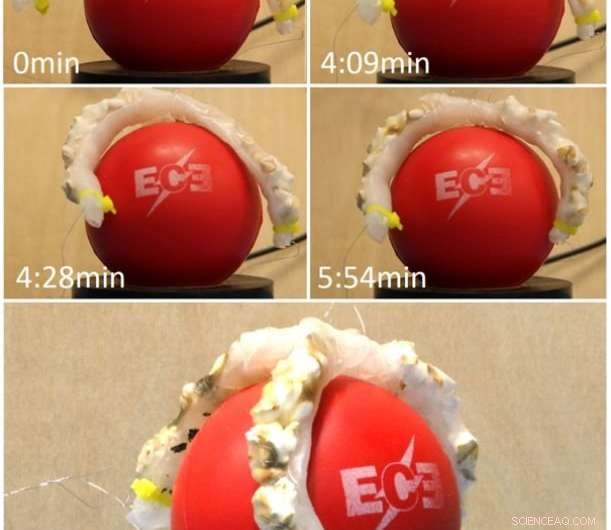
Vezelversterkte elastomeer actuator aangedreven door popcorn gewikkeld in Nichrome 60 draad. Krediet:Steven Ceron et al, Popcorn-aangedreven robotaandrijvingen
Van de Cornell-universiteit, je hebt nu door popcorn aangedreven robotactuatoren om over na te denken. Neem het met een korreltje, goed, gezond verstand. Als IEEE-spectrum 's onderkop zei, "Popcorn is een goedkope, biologisch afbreekbare manier om een robot (eenmalig) aan te drijven."
Maar blijf bij IEEE-spectrum 's Evan Ackerman, de auteur van het artikel hierover, om te ontdekken waarom hij gelooft dat, hoewel het iets is dat je maar één keer kunt doen, het gebruik van popcorn voor het aandrijven van een actuator is ronduit nuttig.
"Je kunt niet-gepofte korrels popcorn zien als kleine klompjes opgeslagen mechanische energie, en die energie kan worden losgelaten en omgezet in kracht en beweging wanneer de kern wordt verwarmd."
Houd er ook rekening mee dat popcorn als accommodatie super goedkoop is, " Hij schreef, en dat het biologisch afbreekbaar en eetbaar was, waren gewoon bonussen.
Een video van IEEE-spectrum die eerder deze maand zijn geüpload, weerspiegelt hun werk, zoals in de krant staat, "Popcorn Aangedreven Robot Actuators." Hun paper is van zes auteurs van Cornell en werd voorbereid voor de IEEE International Conference on Robotics and Automation (ICRA) 2018 in Brisbane, Australië.
Popcorn? Ja, die popcorn. Eetbare popcornpitten. Kinderen vinden het heerlijk om de pitten te horen knappen en iedereen heeft het genoegen om popcorn te eten bij films en om tv te kijken, maar wetenschappers houden ook van het potentieel van de korrels om snel met grote kracht uit te zetten bij toepassing van warmte.
De wetenschappers stellen de vraag hoe popcorn zou kunnen uitpakken voor robottoepassingen. Toepassingen? Zoals waarin? Een van de toepassingen zou een blokkerende actuator zijn die gevuld is met korrels; een ander scenario betrof een origami-actuator. Ackerman zei dat ze "gerecycleerde Newman's Own Organic Popcorn-zakken gebruikten om hun origami-actuators te maken, en 80 gram gepofte pitten konden een kettlebell van 4 kg dragen."
De onderzoekers karakteriseerden drie soorten korrels:medium wit, medium geel en extra klein wit.
IEEE-spectrum , op dat punt, vroeg Steven Ceron, een van de onderzoekers, over hoeveel variabiliteit er was tussen niet-gepofte en gepofte kenmerken van de verschillende soorten popcorn. Ceron zei dat je dezelfde temperatuur nodig hebt om de verschillende soorten korrels te laten knallen. "De uiteindelijke grootte van de gepofte korrels, echter, kan sterk variëren, afhankelijk van de manier van verwarmen."
De onderzoekers onderzochten het gebruik van popcorn via categorieën zoals expansieverhouding, compressie sterkte, overgangstemperatuur, knalkracht en intragranulaire wrijving. Ze toonden knallen via microgolven en via verwarmde Nichrome-draad.
Wat staat hen nu te wachten:"In de nabije toekomst zullen we willen de infrastructuur ontwerpen die nodig is voor stand-alone popcorn-gedreven robots. Dit vereist een ingebed systeem dat de korrels kan verwarmen, en een pomp die de korrels kan verplaatsen. Langetermijn, het werk aan multifunctionele granulaire vloeistoffen dat in dit document wordt gepresenteerd, kan helpen de weg vrij te maken voor een breed scala aan toepassingen op het gebied van stijve, meewerkend, en zachte robots."
IEEE-spectrum hierop ingespeeld. "In de krant staat dat je 'zelfstandige, door popcorn aangedreven robots' zou willen ontwerpen. Ackerman vroeg hem om het idee verder uit te werken.
Ceron dacht dat een interessant resultaat een kleine robot zou zijn die een verpakte kamer met korrels zou kunnen vasthouden. "De robot zou in staat zijn om snel/lokaal een enkele pit te verwarmen en uit de robot te duwen, tegelijkertijd een open gebied vullen met gepofte korrels en de robot voortstuwen."
In aanvulling, Interessante techniek zei dat Ceron en het team geïnteresseerd waren "om andere biologisch afbreekbare opties voor actuatoren te perfectioneren die milieuvriendelijke en goedkope oplossingen voor deze robotonderdelen zouden kunnen bieden."
© 2018 Tech Xplore
 Lassen met stamcellen voor chirurgische lijmen van de volgende generatie
Lassen met stamcellen voor chirurgische lijmen van de volgende generatie- Stabiliserend molecuul kan de weg vrijmaken voor lithium-luchtbrandstofcel
- Rijke defecten die de zuurstofontwikkelingsreactie stimuleren
- Chemici ontdekken hoe blauw licht blindheid versnelt
- NIST presenteert eerste real-world test van nieuwe sensorontwerpen voor schoorsteenemissies
- Nieuw rapport schetst mogelijke opbrengstuitdagingen voor opschaling van natuurlijke landbouw zonder budget in India
- Klimaatverandering bedreigt het onderzoek zelf
- Gebruik van microscopen in de forensische wetenschap
- Wat zijn oppervlaktestromen veroorzaakt door?
- Australië ziet tweede jaar Barrier Reef bleken
Hoofdlijnen
- Soorten lijken bedrieglijk veerkrachtig tegen klimaatverandering
- Het leven van een albatros:individualiteit aanpakken in populatiestudies
- Dansgerelateerde wetenschapsprojecten
- Wat breekt een dubbele helix van DNA af?
- Vissen kunnen ander gedrag gebruiken om zich tegen parasieten te beschermen
- Vijf soorten aseksuele reproductie
- Diabetesmedicijn helpt bij het repareren van UV-beschadigd DNA in cellen van maankinderen
- Een konijn ontleden
- Gouden nanodeeltje gebruikt om virus te vervangen in nieuwe CRISPR-aanpak
- Nieuwe wielunits kunnen de voertuigkosten verlagen

- Renault, Nissan, Mitsubishi onthult nieuw gezamenlijk bestuur na Ghosn

- GM vecht tegen regering om belastingkrediet voor elektrische auto's te behouden

- Vraag en antwoord:Trump, het postkantoor en Amazon

- AI-project over machine learning wil dat computers anticiperen op wat gebruikers van gegevens willen

 Wetenschappers onthullen structuur van aminozuurtransporter die betrokken is bij kanker
Wetenschappers onthullen structuur van aminozuurtransporter die betrokken is bij kanker- Hoe een Bell Curve
- Deepfakes:wat feeën en aliens ons kunnen leren over nepvideo's
- Een model van de draaivleugel maken
- Kleurveranderende coatings klaar voor de grote tijd
- 5 Gebruik van gisting
- Stikstofbindende bomen eten rotsen, cruciale rol spelen in de gezondheid van bossen
- Nieuwe fotogevoelige hydrogels ontwikkeld met oog voor biomedische toepassingen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
