Wetenschap
Een deep learning neuraal netwerk gebruiken om een auto in slechts 20 minuten te laten leren zelf te rijden
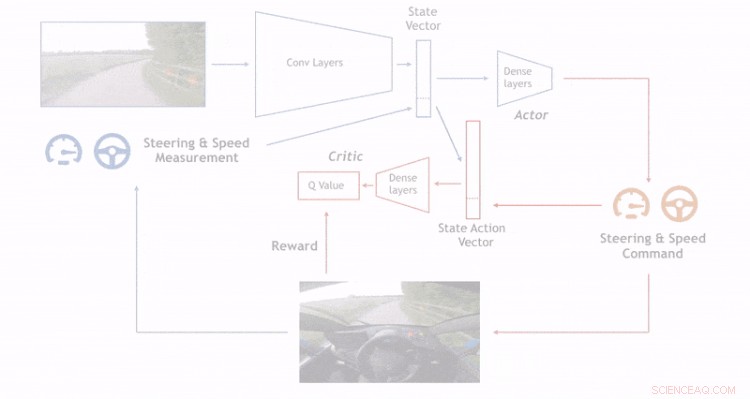
Krediet:Wayve
Een team van onderzoekers van de Britse startup Wayve heeft een manier ontwikkeld om deep learning-netwerken toe te passen op autonoom rijden. In een recente blogpost (samen met de bijbehorende YouTube-demonstratievideo) hebben vertegenwoordigers uiteengezet hoe hun technologie werkt, en bied een demonstratie aan met een echte auto op een echte weg.
Zoals het team van Wayve opmerkt, de meeste zelfrijdende auto's gebruiken een groot aantal camera's en sensoren, samen met kaarttools en veel computerprogrammering. Maar een dergelijke benadering ze beweren, kijkt uit over wat lijkt op een soort plafond. Autonome auto's die zijn geprogrammeerd door grote bedrijven zoals Google hebben een punt bereikt waarop ze goed zijn, maar niet goed genoeg voor algemeen gebruik. Dit, zij beweren, komt omdat dergelijke auto's nog niet slim genoeg zijn om de talloze omstandigheden op een gemiddelde weg aan te kunnen. Wat nodig is, Ze stellen voor, is een slimmere computer, niet meer sensoren of programmering.
Het team van Wayve is van mening dat een slimmere aanpak is om algoritmen voor het leren van versterking te gebruiken, zoals die worden gebruikt bij projecten als DeepMind - laat de computer iets leren op dezelfde manier als mensen doen, door te oefenen. Reinforcement learning-algoritmen vormen de kern van deep learning-netwerken:ze leren door te doen, opnieuw en opnieuw, verbeteren als ze gaan. In het geval van autonome voertuigcontrole, dat zou betekenen autorijden totdat ze het goed hebben.
Om aan te tonen hoe goed een dergelijke aanpak kan werken, een team van Wayve heeft een Renault Twizy uitgerust met een enkele camera en gas, rem- en stuurbedieningsapparatuur en vervolgens aangesloten op een grafische processor en een computer met versterkende leeralgoritmen die het bedrijf heeft ontwikkeld. De computer werd "verteld" dat het optimale resultaat zou zijn dat de auto vooruit zou rijden over een weg zonder de weg te verlaten. Hoe langer hij dit zou kunnen doen, des te beter. Vervolgens voegden ze een menselijke bestuurder toe en plaatsten de auto op een landweg. De menselijke bestuurder zou de auto in de goede richting wijzen en de computer het over laten nemen. Als de auto bijna van de weg raakte, de mens zou het stoppen, laat de auto uitlijnen en geef de computer dan nog een kans. Op deze manier, de computer kon leren hoe te voorkomen dat de auto in ongeveer 20 minuten van de weg raakte. Daarna, het kon oneindig doorgaan.
© 2018 Tech Xplore
 Grammen omzetten in AMU
Grammen omzetten in AMU - Materiaalslijtage decoderen met supercomputers
- High-tech gel helpt bij het afleveren van medicijnen
- Kenmerken van waterstofbinding
- Kunstmatige intelligentie helpt onderzoekers bij het produceren van een recordbrekende katalysator voor de conversie van koolstofdioxide naar ethyleen
- Video:Grondwater in kaart brengen vanuit de lucht
- Het klimaatwetenschappelijk rapport dat Trump hoopte te negeren, zal weerklank vinden buiten Washington, gelijkstroom
- Sporen van drugs gevonden in een dam die de hoofdstad van Nigeria bevoorraadt
- Vietnams hoofdstad om motorfietsen te verbieden tegen 2030
- Zou zilte landbouw de toekomst van kustlandbouw kunnen zijn?
Hoofdlijnen
- Pareidolie:waarom we in bijna alles gezichten zien
- Recordaantal walvissen geteld in Patagonië in Argentinië
- Biologen ontdekken tastzin van bacteriën
- De effecten van tornado's op mens en natuur
- Differentiërende RNA & DNA-virussen
- Pas op voor de huisdieren bij het hanteren van de Halloween-snoepvangst
- Het verschil tussen hoe interne en externe regulatoren werken
- Pogingen om te vangen, red het bedreigde einde van de bruinvis in Mexico
- Waarom wordt natrium gebruikt in DNA-extractie?
- Airbnb verbiedt feesthuizen na dodelijke schietpartij in VS

- Onderzoekers vinden algoritme voor grootschalige hersensimulaties

- Onderzoeker blogde over tijdelijke oplossing voor Apple OS-updates USB-beperkte modus

- Uber schakelt achteruit bij teleurstellend Wall Street-debuut

- Draaien op hernieuwbare energiebronnen:hoe zeker kunnen we zijn over de toekomst?


 Elektronen zetten één stap vooruit zonder twee stappen terug
Elektronen zetten één stap vooruit zonder twee stappen terug- Meter converteren naar Liter
- Natuurkundigen voeren met succes gecontroleerd transport van opgeslagen licht uit
- Wat is het verschil tussen een controle en een gecontroleerde variabele?
- Lopende robots, een YouTube-sensatie, maak je klaar voor de markt
- Onderzoekers brengen dramatische achteruitgang in genetische diversiteit van noordwestelijke zalm in kaart
- Biologisch afbreekbare gewasbeschermingsmiddelen zonder risico's of bijwerkingen
- Het verschil tussen harde en zachte tarwe
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
