Wetenschap
Blinde Cheetah 3-robot kan trappen beklimmen die bezaaid zijn met obstakels
Krediet:Massachusetts Institute of Technology
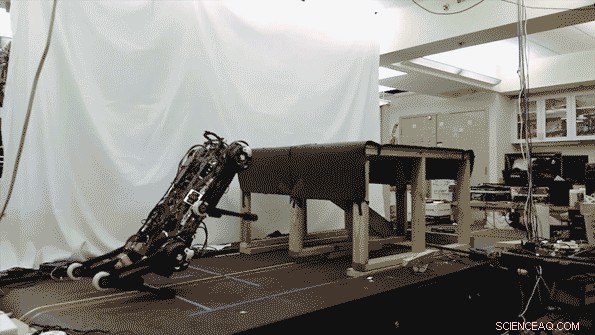
MIT's Cheetah 3-robot kan nu springen en galopperen over ruw terrein, beklim een trap bezaaid met puin, en snel zijn evenwicht herstellen wanneer er plotseling aan wordt getrokken of geduwd, allemaal terwijl ze in wezen blind zijn.
Het mechanische beest van 90 pond - ongeveer zo groot als een volwassen Labrador - is opzettelijk ontworpen om dit alles te doen zonder afhankelijk te zijn van camera's of externe omgevingssensoren. In plaats daarvan, het "voelt" zich een weg door zijn omgeving op een manier die ingenieurs beschrijven als "blinde voortbeweging, 'Het is net alsof je je een weg baant door een pikdonkere kamer.
"Er zijn veel onverwachte gedragingen die de robot moet kunnen afhandelen zonder al te veel op zicht te vertrouwen, " zegt de ontwerper van de robot, Sangbae Kim, universitair hoofddocent werktuigbouwkunde aan het MIT. "Het zicht kan luidruchtig zijn, enigszins onnauwkeurig, en soms niet beschikbaar, en als u te veel op visie vertrouwt, uw robot moet zeer nauwkeurig in positie zijn en zal uiteindelijk langzaam zijn. Dus we willen dat de robot meer vertrouwt op tactiele informatie. Op die manier, het kan onverwachte obstakels aan terwijl het snel beweegt."
Onderzoekers zullen de visievrije mogelijkheden van de robot in oktober presenteren op de International Conference on Intelligent Robots, in Madrid. Naast blinde motoriek, het team zal de verbeterde hardware van de robot demonstreren, inclusief een groter bewegingsbereik in vergelijking met zijn voorganger Cheetah 2, waardoor de robot heen en weer kan strekken, en draai van links naar rechts, net als een kat die lenig wordt om toe te slaan.
Binnen de komende jaren zal Kim stelt zich voor dat de robot taken uitvoert die anders te gevaarlijk of ontoegankelijk zouden zijn voor mensen.
"Cheetah 3 is ontworpen om veelzijdige taken uit te voeren, zoals inspectie van elektriciteitscentrales, die verschillende terreinomstandigheden met zich meebrengt, waaronder trappen, stoepranden, en obstakels op de grond, " zegt Kim. "Ik denk dat er talloze gelegenheden zijn waarbij we robots [zou] willen sturen om eenvoudige taken uit te voeren in plaats van mensen. Gevaarlijk, vies, en moeilijk werk kan veel veiliger worden gedaan door op afstand bestuurbare robots."
Een verbintenis aangaan
De Cheetah 3 kan blindelings trappen op en door ongestructureerd terrein, en kan snel zijn evenwicht herstellen bij onverwachte krachten, dankzij twee nieuwe algoritmen ontwikkeld door het team van Kim:een algoritme voor contactdetectie, en een modelvoorspellend regelalgoritme.
Het contactdetectie-algoritme helpt de robot bij het bepalen van de beste tijd voor een bepaald been om over te schakelen van slingeren in de lucht naar stappen op de grond. Bijvoorbeeld, als de robot op een licht takje stapt versus een hard, zware rots, hoe het reageert - en of het doorgaat met een stap, of terugtrekt en in plaats daarvan met zijn been zwaait - kan zijn evenwicht maken of breken.
"Als het gaat om het omschakelen van de lucht naar de grond, het schakelen moet heel goed gebeuren, " zegt Kim. "Dit algoritme gaat echt over, 'Wanneer is een veilige tijd om mijn voetstap te zetten?'"
Het contactdetectie-algoritme helpt de robot bij het bepalen van de beste tijd om een been over te schakelen tussen zwaaien en stappen, door voor elk been constant drie kansen te berekenen:de kans dat een been contact maakt met de grond, de waarschijnlijkheid van de kracht die wordt gegenereerd zodra het been de grond raakt, en de kans dat het been in de midswing zal zijn. Het algoritme berekent deze kansen op basis van gegevens van gyroscopen, versnellingsmeters, en gewrichtsposities van de benen, die de hoek en hoogte van het been ten opzichte van de grond registreren.
Indien, bijvoorbeeld, de robot stapt onverwachts op een houten blok, zijn lichaam zal plotseling kantelen, het verschuiven van de hoek en hoogte van de robot. Die gegevens zullen onmiddellijk worden gebruikt bij het berekenen van de drie kansen voor elk been, die het algoritme zal combineren om te schatten of elk been zich moet verplichten om op de grond te duwen, of til op en zwaai weg om zijn evenwicht te bewaren - en dat alles terwijl de robot vrijwel blind is.

MIT's Cheetah 3-robot kan trappen beklimmen en over obstakels stappen zonder de hulp van camera's of visuele sensoren. Krediet:Massachusetts Institute of Technology
"Als mensen onze ogen sluiten en een stap zetten, we hebben een mentaal model voor waar de grond zou kunnen zijn, en kan zich daarop voorbereiden. Maar we vertrouwen ook op het gevoel van aanraking met de grond, " zegt Kim. "We doen min of meer hetzelfde door meerdere [bronnen van] informatie te combineren om de overgangstijd te bepalen."
De onderzoekers testten het algoritme in experimenten met de Cheetah 3 dravend op een laboratoriumloopband en klimmend op een trap. Beide oppervlakken waren bezaaid met willekeurige voorwerpen zoals houten blokken en rollen tape.
"Het kent niet de hoogte van elke stap, en niet weet dat er obstakels op de trap zijn, maar het ploegt gewoon door zonder zijn evenwicht te verliezen, ' zegt Kim. 'Zonder dat algoritme, de robot was erg onstabiel en viel gemakkelijk."
Toekomstige kracht
De blinde voortbeweging van de robot was ook deels te danken aan het modelvoorspellende besturingsalgoritme, die voorspelt hoeveel kracht een bepaald been moet uitoefenen als het eenmaal een stap heeft gezet.
"Het contactdetectie-algoritme zal je vertellen, 'dit is het moment om krachten op de grond uit te oefenen, '" zegt Kim. "Maar als je eenmaal op de grond bent, nu moet je berekenen wat voor krachten je moet uitoefenen, zodat je het lichaam op de juiste manier kunt bewegen."
Het modelvoorspellende besturingsalgoritme berekent de multiplicatieve posities van het lichaam en de benen van de robot een halve seconde in de toekomst, als een bepaalde kracht wordt uitgeoefend door een bepaald been wanneer het contact maakt met de grond.
"Stel dat iemand de robot zijwaarts schopt, ' zegt Kim. 'Als de voet al op de grond staat, het algoritme beslist, 'Hoe moet ik de krachten op de voet aangeven? Omdat ik een ongewenste snelheid aan de linkerkant heb, dus ik wil een kracht in de tegenovergestelde richting uitoefenen om die snelheid te doden. Als ik 100 Newton in deze tegenovergestelde richting toepas, wat gebeurt er een halve seconde later?"
Het algoritme is ontworpen om deze berekeningen elke 50 milliseconden voor elke etappe te maken, of 20 keer per seconde. Bij experimenten, onderzoekers introduceerden onverwachte krachten door de robot te schoppen en te duwen terwijl deze op een loopband draafde, en hem aan de riem rukkend terwijl hij een met obstakels beladen trap opklom. Ze ontdekten dat het modelvoorspellende algoritme de robot in staat stelde snel tegenkrachten te produceren om zijn evenwicht te hervinden en vooruit te blijven gaan. zonder te ver in de tegenovergestelde richting te kantelen.
"Het is dankzij die voorspellende controle die de juiste krachten op de grond kan uitoefenen, gecombineerd met dit contactovergangsalgoritme dat elk contact zeer snel en veilig maakt, ' zegt Kim.
Het team had al camera's aan de robot toegevoegd om hem visuele feedback van zijn omgeving te geven. Dit zal helpen bij het in kaart brengen van de algemene omgeving, en geeft de robot een visuele waarschuwing bij grotere obstakels zoals deuren en muren. Maar voor nu, het team werkt aan het verder verbeteren van de blinde voortbeweging van de robot
"We willen eerst een zeer goede controller zonder visie, " zegt Kim. "En als we visie toevoegen, zelfs als het u de verkeerde informatie zou kunnen geven, het been moet kunnen omgaan (obstakels). Want wat als het op iets stapt dat een camera niet kan zien? Wat zal het doen? Dat is waar blinde motoriek kan helpen. We willen niet te veel vertrouwen op onze visie."
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Chemici benutten de kracht van licht om asymmetrische moleculen aan te pakken
Chemici benutten de kracht van licht om asymmetrische moleculen aan te pakken- Antacida helpt tuberculosebacteriën te overleven
- Ontwikkeling van een nieuw type koeling via gedwongen overgang naar vloeibaar gas
- Nieuw biosensor-zymonzuur toont veranderingen in pH-waarde
- Wetenschappers ontwikkelen ultragevoelige organische fototransistoren op basis van nieuwe hybride gelaagde architectuur
- Hoe maak je een ecosysteem voor kinderen met pop-flessen
- Hoe klimaatverandering het smelten van de gletsjers in Nieuw-Zeeland 10 keer waarschijnlijker maakte
- Studie vindt dat verstedelijking verschillende dingen betekent voor verschillende stroomgebieden
- 5 invasieve soorten die de wereld kunnen veroveren
- Kleine meren en tijdelijke vijvers geven CO2 af, zelfs als ze droog zijn
Hoofdlijnen
- Diffusie: wat is het? & Hoe gebeurt het?
- Dammen en andere barrières voor paaigebieden voor zalm zorgen voor uitdagingen voor visserijbeheerders
- Hoe hoogte te bepalen via het skelet
- Geboren onder een ongunstige maan, babyvissen vertragen nederzetting op koraalriffen
- Wat is een kruisverwijzingssysteem?
- Het type weefsel dat de Bodys-structuren ondersteunt en vasthoudt
- Overeenkomsten tussen bacteriën en protisten
- Europarlementariërs dringen aan op onderzoek naar Monsantos heerschappij over veiligheidsstudies
- Plankton is de kleinste onbezongen held op aarde
- Winklevoss-tweeling pitcht plan om digitaal geld te reguleren

- Duizenden Zwitsers protesteren tegen draadloze 5G vanwege gezondheidsproblemen

- Volkswagen stopt in 2019 met iconische Kever-auto's

- De druk op YouTube neemt toe om jonge gebruikers beter te beschermen

- Het internet is verrassend kwetsbaar, crasht duizenden keren per jaar, en niemand maakt het sterker


 Nieuwe dataset opent Estlandse bodeminformatie voor veelzijdig gebruik
Nieuwe dataset opent Estlandse bodeminformatie voor veelzijdig gebruik- F-Secure vindt een manier om oudere op RFID gebaseerde hotelsleutelsloten te hacken
- Onderzoek suggereert dat koraalherstelprojecten kunnen helpen bij het herstellen van visgemeenschappen
- De microchipindustrie helpen (zeer laag) met de stroom mee te gaan
- Wetenschappers verfijnen de zoektocht naar donkere materie
- Aardbevingsfout waarvan lang gedacht werd dat slapend Los Angeles zou kunnen verwoesten, onderzoekers zeggen:
- Verbazingwekkend,
- Phonon-katalyse kan leiden tot een nieuw veld
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
