Wetenschap
Transparante, palingachtige zachte robot kan geruisloos onder water zwemmen
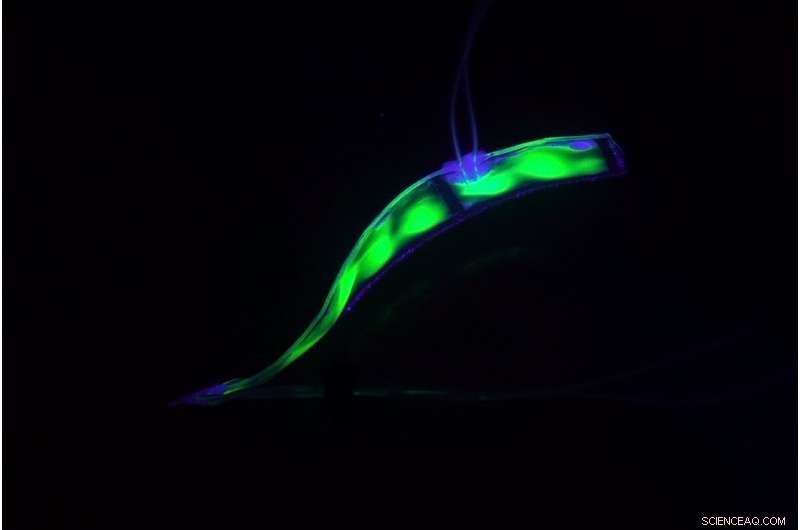
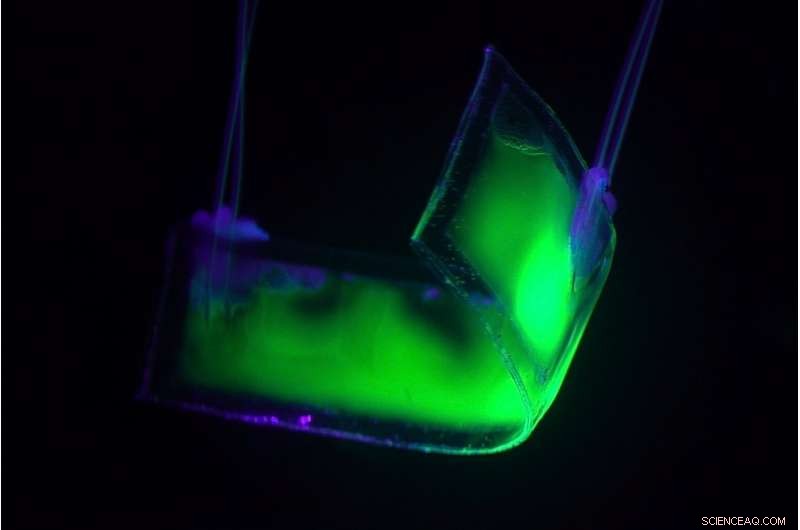
De geleidende kamers in de kunstmatige spieren van de robot kunnen worden geladen met fluorescerende kleurstof (zoals getoond in de video bij het onderzoek en deze release). In de toekomst, de fluorescentie zou kunnen worden gebruikt als een soort signaleringssysteem. Krediet:Universiteit van Californië, San Diego
Een innovatieve, aalachtige robot ontwikkeld door ingenieurs en mariene biologen van de Universiteit van Californië kan geruisloos zwemmen in zout water zonder elektromotor. In plaats daarvan, de robot gebruikt kunstmatige spieren gevuld met water om zichzelf voort te stuwen. De voetlange robot, die is verbonden met een elektronicabord dat op het oppervlak blijft, is ook nagenoeg transparant.
Het team, waaronder onderzoekers van UC San Diego en UC Berkeley, beschrijft hun werk in het nummer van 25 april van: Wetenschap Robotica . Onderzoekers zeggen dat de bot een belangrijke stap is in de richting van een toekomst waarin zachte robots naast vissen en ongewervelde dieren in de oceaan kunnen zwemmen zonder ze te storen of te schaden. Vandaag, de meeste onderwatervoertuigen die zijn ontworpen om het leven in zee te observeren, zijn stijf en onderzeeërachtig en worden aangedreven door elektrische motoren met luidruchtige propellers.
"In plaats van propellers, onze robot gebruikt zachte kunstmatige spieren om als een paling onder water te bewegen zonder enig geluid te maken, " zei Caleb Christianson, een doctoraat student aan de Jacobs School of Engineering aan de UC San Diego.
Een belangrijke innovatie was het gebruik van het zoute water waarin de robot zwemt om de elektrische krachten te genereren die hem voortstuwen. De bot is uitgerust met kabels die spanning toepassen op zowel het zoute water eromheen als op de zakjes water in zijn kunstmatige spieren. De elektronica van de robot levert vervolgens negatieve ladingen in het water net buiten de robot en positieve ladingen binnen in de robot die de spieren activeren. De elektrische ladingen zorgen ervoor dat de spieren buigen, het genereren van de golvende zwembeweging van de robot. De ladingen bevinden zich net buiten het oppervlak van de robot en voeren zeer weinig stroom, zodat ze veilig zijn voor het nabijgelegen zeeleven.
"Onze grootste doorbraak was het idee om de omgeving te gebruiken als onderdeel van ons ontwerp, " zei Michael T. Tolley, de corresponderende auteur van het artikel en een professor in werktuigbouwkunde aan de Jacobs School aan de UC San Diego. "Er zullen meer stappen zijn om een efficiënt, praktisch, ongebonden palingrobot, maar op dit moment hebben we bewezen dat het mogelijk is."
Eerder, andere onderzoeksgroepen hadden robots ontwikkeld met vergelijkbare technologie. Maar om deze robots aan te drijven, ingenieurs gebruikten materialen die in halfstijve frames onder constante spanning moeten worden gehouden. De Wetenschap Robotica uit onderzoek blijkt dat de frames niet nodig zijn.
In plaats van propellers, onze robot gebruikt zachte kunstmatige spieren om als een aal onder water te bewegen zonder enig geluid te maken. Krediet:Universiteit van Californië, San Diego
"Dit is in zekere zin de zachtste robot die is ontwikkeld voor onderwaterexploratie, ' zei Tolle.

Onderzoekers testten de robot in tanks in het Birch Aquarium van het Scripps Institution of Oceanography aan de UC San Diego. Krediet:Universiteit van Californië, San Diego
De robot werd getest in zoutwatertanks gevuld met kwallen, koraal en vissen in het Birch Aquarium in het Scripps Institution of Oceanography aan UC San Diego en in Tolley's lab.
De geleidende kamers in de kunstmatige spieren van de robot kunnen worden geladen met fluorescerende kleurstof (zoals getoond in de video bij het onderzoek en deze release). In de toekomst, de fluorescentie zou kunnen worden gebruikt als een soort signaleringssysteem.
De volgende stappen omvatten ook het verbeteren van de betrouwbaarheid en de geometrie van de robot. Onderzoekers moeten ballast verbeteren, de robot uitrusten met gewichten zodat hij dieper kan duiken. Voor nu, ingenieurs hebben ballastgewichten geïmproviseerd met een reeks objecten, zoals magneten. Bij toekomstig werk, onderzoekers stellen zich het bouwen van een kop voor hun palingrobot voor om een reeks sensoren te huisvesten.
 Boodschap aan de EU:je hebt de kans om te stoppen met het aanwakkeren van verwoesting in de Amazone
Boodschap aan de EU:je hebt de kans om te stoppen met het aanwakkeren van verwoesting in de Amazone- Verontreinigende stoffen van bosbranden beïnvloeden de groei van gewassen en vegetatie honderden kilometers van de impactzone
- Zeespiegelstijging zou de Verenigde Staten kunnen hervormen, migratie naar het binnenland in gang zetten
- Wat zijn de Planten van de Tropische Oceanen?
- Brandweerlieden bestrijden nieuwe branden in Californië
Hoofdlijnen
- Cannabis kweken met moderne wetenschap en technologie
- Zouttolerante planten kweken
- Waarom is chemie belangrijk voor de studie van anatomie en fysiologie?
- Kunnen eukaryoten overleven zonder mitochondria?
- Mexico vangt zeldzame vaquita-bruinvis om soorten te redden
- Wondgenezing of regeneratie - de omgeving beslist?
- Wat is het Malthusiaanse uitgangspunt?
- Hoe worden bacteriën resistent tegen antibiotica?
- Typen cellijnen
- Studie onderzoekt de kosten van het sluiten van kerncentrales in Duitsland

- Eendimensionale objecten veranderen in nieuwe dimensies

- De klok tikt door voor bedrijven die afhankelijk zijn van import uit China

- Toevoeging van guanidiniumthiocyanaat aan gemengde tin-loodperovskieten om de efficiëntie van zonnecellen te verbeteren

- Samsung bereikt schikking over exploderende wasmachines


 Om ons kwetsbare weg- en spoorsysteem te versterken, moeten we een micromobiliteitsnetwerk toevoegen
Om ons kwetsbare weg- en spoorsysteem te versterken, moeten we een micromobiliteitsnetwerk toevoegen- Onderzoekers ontwikkelen sensoren die menselijke biomarkers en giftig gas detecteren
- Laat de wetenschap Amazon-gemeenschappen in de steek?
- Dodelijke cycloon snijdt verwoestend pad in India en Bangladesh
- Wat is glucose?
- Nieuwe methode voor synthese van moleculaire waterstof stelt maatstaf voor platinavrije elektrokatalysatoren
- Megadroogtes in het droge Centraal-Azië vertraagden de culturele uitwisseling langs de proto-Zijderoute
- Misdaad in de wijnstokken:Elzas bestrijdt druivendiefstal te paard
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
