Wetenschap
Programmeerbare druppelmanipulatie door een robot met magnetische activering
Typisch gedrag van de druppeltjes gemanipuleerd met behulp van de magnetisch aangedreven robot. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay5808
Druppelmanipulatie in materiaalkunde kan bijdragen aan wateropvang, medische diagnostiek en medicijnafgiftetechnieken. Hoewel op structuur gebaseerde vloeibare bewerkingen veel worden gebruikt in de natuur en in bio-geïnspireerde kunstmatige materialen, laboratoriumstrategieën zijn afhankelijk van vaste structuren voor unidirectionele waterbeweging. In een nieuwe studie over wetenschappelijke vooruitgang , Een Li en een onderzoeksteam in het Institute of Chemistry en de University of Chinese Academy of Sciences in China stelden voor om een magnetisch aangedreven robot te ontwikkelen. Het construct had verstelbare structuren om weerstandskrachten te verdelen en druppelgedrag te bepalen. De robot kan transporteren, splitsen, laat druppels los en roteer ze voor universele toepassingen in verschillende velden en ruwe omgevingen. De nieuwe bevindingen bieden een efficiënte strategie voor geautomatiseerde druppelmanipulatie.
In dit werk, Li et al. gebruikte betrouwbare methoden om druppels te manipuleren met behulp van een magnetisch aangedreven robot met stalen kralen in een programmeerbaar magnetisch veld. De wetenschappers controleerden de structuur van de robot door het magnetische veld aan te passen. De gedifferentieerde robotstructuren leidden tot verschillende combinaties van druppelgedrag, waaronder splitsen, uitgave, rotatie en transport. De robot is universeel toepasbaar op verschillende vloeistoffen waaronder water, olie en gas. Li et al. ondersteunde robotbediening in beperkte ruimtes, op oneffen oppervlakken en zelfs onder watervrije of anaërobe omstandigheden. Het werk heeft een groot potentieel voor materiaaltransport, microfabricage en in de klinische geneeskunde.
In-lab druppelmanipulatie is geïnspireerd door de natuur. Bijvoorbeeld, planten en dieren hebben systemen voor het opvangen van mist getoond in cactussen, waterverzameling op spinzijde en beïnvloedde het gedrag van de Namib Desert-kever om water te verzamelen en te verplaatsen. De asymmetrische en intrinsieke structuur voor het verzamelen van watermonsters kan een Laplace-drukgradiënt in de druppels veroorzaken, beweging in een vooraf ingestelde richting veroorzaken. Onderzoekers kunnen verschillende externe strategieën gebruiken, waaronder elektriciteit, magneten, akoestiek en bevochtigende oppervlakken om hun beweging te activeren. Van deze, magnetische kracht heeft het voordeel van actie op lange afstand, veiligheid en bedieningsgemak. Onderzoekers hadden magnetische deeltjes gebruikt om waterdruppels over hydrofobe of van patronen voorziene oppervlakken en over magnetisch responsieve materialen te slepen.
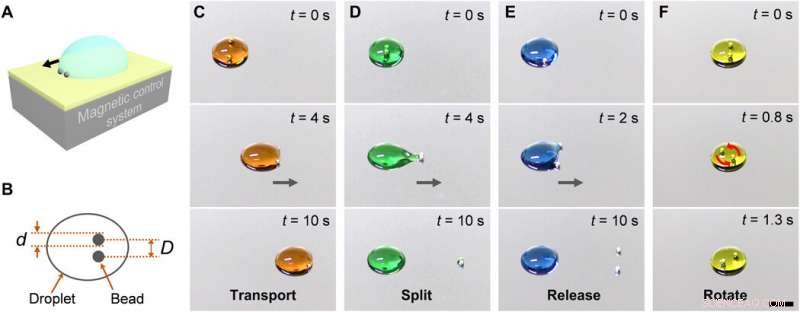
Schema en demonstratie van de magnetisch aangedreven robot. (A) Schema van het druppelmanipulatiesysteem. (B) parameters die de magnetisch aangedreven robot beschrijven. (C tot F) Typisch gedrag van de druppeltjes die door de robot worden gemanipuleerd. Druppels kunnen worden vervoerd (C), splitsen (D), vrijgegeven (E), en geroteerd (F) door de robot. De grijze pijlen vertegenwoordigen de bewegingsrichting van de robots. De bewegingssnelheid is 2 mm/s. Het volume van de druppels is 250 ul. Schaalbalk, 5mm. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay5808
Li et al. noemde de twee stalen kralen in het magnetische controlesysteem de 'robot' en kleurde de waterdruppels met voedseladditieven om verschillende modi van bediening duidelijk te identificeren. De hydrofiele (waterminnende) robot ving de druppel gemakkelijk op bij contact. Het onderzoeksteam bracht de druppel over en paste de structuur aan om een dochterdruppel te splitsen of de druppel vrij te geven door de afstand tussen de kralen te verkleinen of te vergroten. Het proces was voornamelijk gebaseerd op de robotstructuur waar het volume (V) het resultaat beïnvloedde. Li et al. kwantificeerde de structuur van de robot met behulp van de hart-op-hart afstand van de kralen tot de diameter (D/d). Bijvoorbeeld, een robot met een D/d-verhouding van 1,67 zou een druppel water van 150 µL kunnen transporteren. Echter, als de druppel vergroot tot 350 µL, het zou splitsen. Om dit te begrijpen, ze analyseerden mechanisch het hele systeem en bepaalden vervolgens dat de drijvende kracht achter het apparaat de adhesie tussen de kraal en de druppel was.

Weergave van de stapsgewijze neutralisatiereacties op basis van zuur. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay5808
Na het beheersen van de waterdruppel in de lucht, het team onderzocht de robot onder verschillende omstandigheden, waaronder verschillende atmosferen. Bijvoorbeeld, ze sleepten een druppel omhoog of omlaag om de zwaartekracht en de adhesiekrachten tussen verschillende druppeltjes en het substraat te overwinnen. Dergelijke apparaten hebben toepassingen in beperkte ruimtes, zoals dozen en buizen die van vitaal belang zijn in microfluïdica en klinische geneeskunde. Lossless transport en nauwkeurige reagenscontrole zijn van vitaal belang voor kwantitatieve chemische microreacties die veel worden gebruikt in de analytische chemie, diagnostiek en biotechnologie. Bijvoorbeeld, Li et al. opeenvolgende zuur-base neutralisatiereacties uitgevoerd via programmeerbare druppelmanipulatie van de robot, om een dochterdruppel te splitsen en over te brengen om een neutrale druppel te vormen. De robots boden een veelzijdige route om druppeltjes automatisch te controleren op microreacties met behulp van precieze hoeveelheden reagens die typisch giftig zijn, radioactief of explosief van aard.
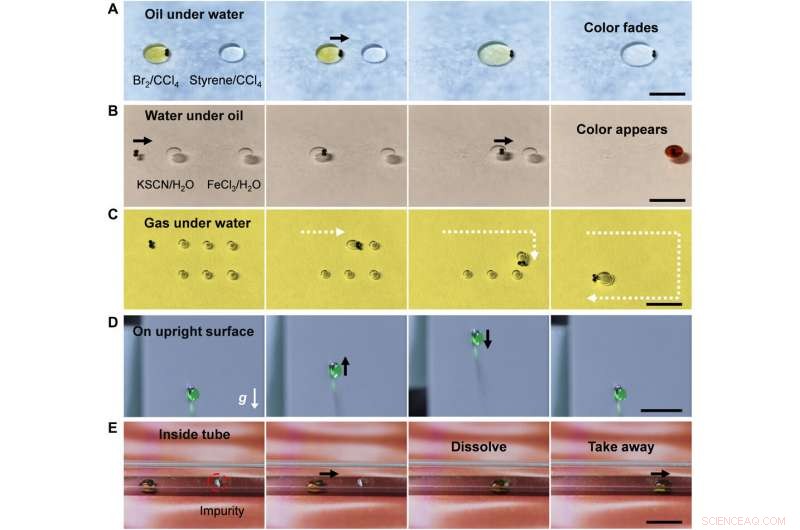
Algemene demonstratie van de robot. (A) Manipulatie van oliedruppels onder water. De oliedruppeltjes (100 ul) worden CCl4-opgelost met Br2 (links) en styreen (rechts). De robot transporteert de linker druppel om zich te mengen met de rechter. (B) Waterdruppel manipulatie onder olie (n-heptadecaan). De druppels (50 ul) worden in water opgelost met KSCN (links) en FeCl3 (rechts), respectievelijk. De linker druppel wordt door de robot opgevangen en naar de rechter getransporteerd. (C) Gasbel manipulatie onder water. Een superhydrofobe robot kan achtereenvolgens de gasbellen (20 l) opvangen. De witte stippellijn geeft het traject van de robot aan. (D) manipulatie van een waterdruppel op het rechtopstaande oppervlak. De robot transporteert een waterdruppel van 20 l om op en neer te bewegen met een snelheid van 2 mm/s. (E) manipulatie van een waterdruppel in een buis. Een druppel (20 l) wordt geactiveerd door de robot om de onzuiverheid in een buis op te vangen. Na 1 minuut, de onzuiverheid wordt opgelost en door de druppel weggenomen. De rode gestippelde cirkel geeft de locatie van de onzuiverheid aan. De zwarte pijl geeft de beweging van de druppel aan. Schaalbalken, 10mm. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay5808
De onderzoekswetenschappers simuleerden vervolgens biomedische processen in het laboratorium om het potentieel van de robot te verkennen tijdens in vivo medische toepassingen. Ze simuleerden eerst stenen of minerale afzettingen in organen zoals nieren en galblaas, die over het algemeen intact blijven vanwege structurele limieten die hun chirurgische verwijdering verhinderen. Met behulp van de microrobot, ze sleepten een medicijndruppel op de gesimuleerde stenen naar de stenen voor gemakkelijke verzameling en verwijdering (op basis van de compatibiliteit tussen de twee oppervlakken). In het volgende experiment, ze toonden het potentieel van de robot om bloedvaten te verwijderen of te reinigen door een overdaad aan cholesterol op te bouwen in kransslagaders - weergegeven met een buis gevuld met water. Ze vervoerden de medicijndruppels om de gesimuleerde plaque te vangen en losten het medicijn op voor verwijdering door de robot. De innovatieve methoden kunnen veelzijdige functies hebben voor in vivo medische toepassingen.
Simulatie van medicijnafgifte. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aay5808
Op deze manier, Een Li en collega's stelden een eenvoudige en algemene strategie voor om druppeltjes te manipuleren met behulp van een magnetisch aangedreven robot gemaakt van twee stalen kralen. Ze bestuurden de structuur met behulp van een magnetisch veld dat de verdeling van weerstandskrachten aan de voor- en achtersegmenten van de druppel regelde. Ze realiseerden meerdere gedragingen voor de druppeltjes, waaronder transport, splitsen, loslaten en draaien. Naast het manipuleren van waterdruppels in de lucht, de robot toonde belofte om complexe vloeistoffen zoals olie, water-in-olie en gas-in-water. De stalen kralen toonden manoeuvreerbaarheid van de druppels in beperkte ruimtes, inclusief giftige en radioactieve omgevingen. Het werk heeft een aanzienlijk potentieel op het gebied van de fabricage van apparaten, detectie en bioassay, evenals in de geneeskunde in vivo. Het team voorziet verdere optimalisaties van het systeem om kleinere druppelmanipulatie op nano- en picoliterschaal mogelijk te maken met verbeterde biocompatibiliteit.
© 2020 Wetenschap X Netwerk
 Verschillen tussen zinkmonomethionine en zinkpicolinaat
Verschillen tussen zinkmonomethionine en zinkpicolinaat - Nieuwe brandwerende coating om falen bij stalen bouwbranden te voorkomen
- Tegengestelde actie zou de industriële gasscheiding kunnen verbeteren
- Hoe wordt Glycerol gemaakt?
Glycerol is een veelzijdige verbinding die wordt gebruikt om zeep, lotion, nitroglycerine, conserveermiddelen en smeermiddelen te maken. Het begrijpen van de structuur van glycerol is de sleutel tot het begrijpen van de
- Putty-achtige composieten van galliummetaal met potentieel voor toepassing in de echte wereld
- Wanneer de natuur haar woede op druiven uitblaast
- Ongekende aard van extreme overstromingen in Noordwest-Engeland onthuld
- Uitbarstende Indonesische vulkaan spuwt as, lava
- 'S Werelds grootste meren onthullen trends in klimaatverandering
- Tweelingbranden in Californië zijn de op een na grootste in de geschiedenis van de staat
Hoofdlijnen
- Hoe dicht zijn we bij het creëren van een universele bloedgroep?
- Hoe biologische antropologie werkt
- Celmodel onthult dynamische aard van segmentatieklok die de vorming van wervels stimuleert
- Bodembedekkers verhogen de vernietiging van onkruidzaden in velden, licht werpen op interacties met roofdieren
- Het simuleren van seks met walvisachtigen met kadaverdelen biedt inzicht in mariene copulatie
- Hoe overtuigend is een Y-chromosoomprofielmatch tussen verdachte en plaats delict?
- Vogels leren van elkaars walging, waardoor insecten felle kleuren kunnen ontwikkelen
- Tientallen nieuwe natuurcorridors geïdentificeerd voor Afrikaanse zoogdieren
- Wat zijn de niveaus van organisatie in de biologie?
- Synthesestudies transformeren afvalsuiker voor toepassingen voor duurzame energieopslag

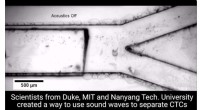
- Akoestisch microfluïdisch platform scheidt circulerende tumorcellen voorzichtig en snel van bloedmonsters
- Een fosfineoxidekatalysator gebruiken om nucleofiele substitutiereacties van alcoholen groener te maken

- Uranium onthult zijn ware aard
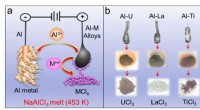
- Wetenschappers stellen IAP-proces voor voor scheiding van aluminiumlegeringen

 Professor roept op tot federale garantie voor kwaliteitsonderwijs voor kinderen
Professor roept op tot federale garantie voor kwaliteitsonderwijs voor kinderen- De geschiedenis van windvinnen
- Australia River Agency aan de schandpaal genageld te midden van massale vissterfte
- Brazilië worstelt met verbod controversiële onkruidverdelger
- 2 Australische bosbranden smelten samen tot inferno; man ernstig verbrand
- Asteroid Day vieren met ESA en de wereld
- Hoe een container te bouwen waar het ijs gedurende 4 uur niet smelt
- Nieuw onderzoek vindt dat oceanische opwelling eerdere theorieën tart
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
