Wetenschap
Talloze rotsblokken, veel rotsen, geen stof:MASCOT's zigzaggen over de asteroïde Ryugu
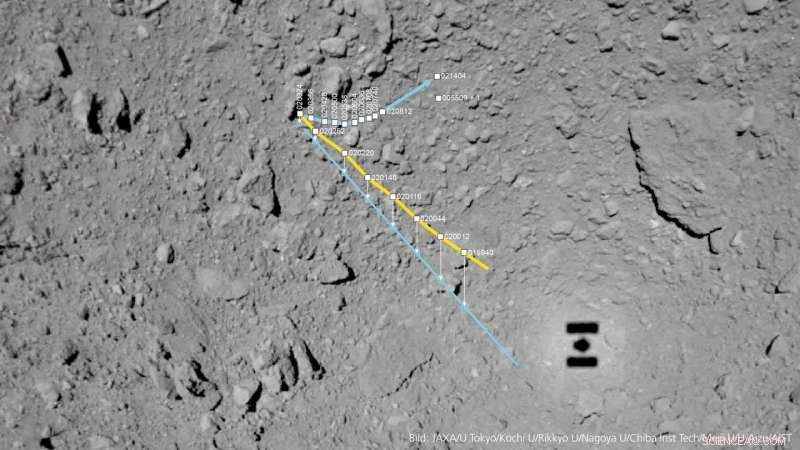
MASCOT's nadering van Ryugu en zijn pad over het oppervlak. Krediet:Duits ruimtevaartcentrum
Zes minuten vrije val, een zachte impact op de asteroïde en dan 11 minuten terugkaatsen tot hij tot rust komt. Dat is hoe, in de vroege uurtjes van 3 oktober 2018, de reis van de MASCOT-asteroïdelander begon op asteroïde Ryugu - een land vol wonderen, mysterie en uitdagingen. Ongeveer 17 uur wetenschappelijk onderzoek volgde op deze eerste 'wandeling' op de asteroïde met een diameter van bijna 900 meter. De lander werd aangestuurd en bestuurd vanuit het MASCOT-controlecentrum op de locatie van het Duitse lucht- en ruimtevaartcentrum (Deutsches Zentrum für Luft- und Raumfahrt; DLR) in Keulen in aanwezigheid van wetenschappelijke teams uit Duitsland, Frankrijk en Japan. MASCOT overtrof alle verwachtingen en voerde zijn vier experimenten uit op verschillende locaties op de asteroïde. Nooit eerder in de geschiedenis van de ruimtevaart is een lichaam van het zonnestelsel op deze manier verkend. Het is nu mogelijk geweest om het pad van MASCOT op het oppervlak van Ryugu nauwkeurig te volgen op basis van beeldgegevens van de Japanse ruimtesonde Hayabusa2 en de beelden en gegevens van de lander.
"Dit succes was mogelijk dankzij de modernste robottechnologie, langetermijnplanning en intensieve internationale samenwerking tussen de wetenschappers en ingenieurs van de drie ruimtelanden Japan, Frankrijk en Duitsland, " zegt Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology over deze mijlpaal in de verkenning van het zonnestelsel. "We zijn trots op hoe MASCOT zich een weg heeft weten te banen over de asteroïde Ryugu over keien en rotsen en zoveel gegevens over zijn samenstelling naar de aarde heeft kunnen sturen, ", zegt DLR-voorzitter Pascale Ehrenfreund.
MASCOT had geen voortstuwingssysteem en landde in een vrije val. Zes minuten na het scheiden van Hayabusa2, en na het einde van een ballistische baan, de landingsmodule maakte zijn eerste contact met asteroïde Ryugu. Op het oppervlak, MASCOT bewoog zich door de activering van een wolfraam swingarm, versneld en vertraagd door een motor. Hierdoor kon MASCOT naar de 'juiste' kant worden verplaatst of zelfs over het oppervlak van de asteroïde springen. De aantrekkingskracht op Ryugu is slechts één 66, 500ste van de aarde, dus het beetje momentum was genoeg:een technologische innovatie voor een ongebruikelijke vorm van mobiliteit op een asteroïde-oppervlak dat voor het eerst in de geschiedenis van de ruimtevaart werd gebruikt als onderdeel van de Hayabusa2-missie.
Door een rotstuin vol ruige keien en geen vlakke oppervlakken
Om het pad van MASCOT over het oppervlak van Ryugu te reconstrueren, de camera's aan boord van de Hayabusa2-moedersonde waren gericht op de asteroïde. De optische navigatiecamera's (ONC) legden de vrije val van de lander vast in verschillende beelden, ontdekte zijn schaduw op de grond tijdens de vluchtfase, en ten slotte identificeerde MASCOT in verschillende afbeeldingen direct op het oppervlak. Het patroon van de ontelbare rotsblokken die op het oppervlak waren verdeeld, was ook te zien in de richting van de respectieve horizon op schuine foto's van de DLR MASCAM-camera van de lander. De combinatie van deze informatie ontgrendelde het unieke pad dat door de lander werd gevolgd.
Na de eerste aanrijding, MASCOT stuiterde soepel van een groot blok, raakte de grond ongeveer acht keer, en bevond zich vervolgens in een voor de metingen ongunstige rustpositie. Na het commando en het uitvoeren van een speciaal voorbereide correctiemanoeuvre, MASCOT kwam voor de tweede keer tot stilstand. De exacte locatie van deze tweede positie wordt nog bepaald. Daar, de lander voltooide gedetailleerde metingen tijdens één asteroïde dag en nacht. Daarna volgde een kleine 'minibeweging' om de MicrOmega-spectrometer nog betere condities te geven om de samenstelling van het asteroïdemateriaal te meten.
Eindelijk, MASCOT werd voor de laatste keer ingezet voor een grotere sprong. Op de laatste locatie voerde het nog wat metingen uit voordat de derde nacht op de asteroïde begon, en het contact met Hayabusa2 ging verloren toen het ruimteschip uit het zicht was geraakt. Het laatste signaal van MASCOT bereikte de moedersonde om 21:04 CEST. De missie was voorbij. "We hadden een batterijduur van minder dan 16 uur verwacht vanwege de koude nacht, zegt MASCOT-projectmanager Tra-Mi Ho van het DLR Institute of Space Systems. "Ten slotte, we hebben MASCOT meer dan een uur langer kunnen bedienen, zelfs totdat de radioschaduw begon, wat een groot succes was." Tijdens de missie, het team noemde de landingsplaats van MASCOT (MA-9) 'Alice's Wonderland', naar het gelijknamige boek van Lewis Carroll (1832-1898).
Een waar wonderland
Na de gebeurtenissen te hebben gereconstrueerd die plaatsvonden op asteroïde Ryugu, de wetenschappers zijn nu bezig met het analyseren van de eerste resultaten van de verkregen data en beelden. "Wat we van een afstand zagen, gaf ons al een idee van hoe het er aan de oppervlakte zou kunnen uitzien, " meldt Ralf Jaumann van het DLR Institute of Planetary Research en wetenschappelijk directeur van de MASCOT-missie. "In feite, aan de oppervlakte is het nog gekker dan verwacht. Alles is bedekt met ruwe blokken en bezaaid met keien. Hoe compact deze blokken zijn en waaruit ze zijn samengesteld, we weten het nog steeds niet. Maar het meest verrassende was dat grote ophopingen van fijn materiaal nergens te vinden zijn – en dat hadden we niet verwacht. We moeten dit de komende weken onderzoeken, omdat de kosmische verwering eigenlijk fijn materiaal had moeten produceren, ’ vervolgt Jaumann.
"MASCOT heeft precies geleverd wat we verwachtten:een 'verlenging' van de ruimtesonde op het oppervlak van Ryugu en directe metingen ter plaatse, " zegt Tra-Mi Ho. Nu zijn er metingen over het hele spectrum, van telescooplichtkrommen van de aarde tot teledetectie met Hayabusa2 tot de microscopische bevindingen van MASCOT. "Dit zal van enorm belang zijn voor de karakterisering van deze klasse van asteroïden, " benadrukt Jaumann.
Ryugu is een asteroïde van het C-type - een koolstofrijke vertegenwoordiger van de oudste lichamen van het viereneenhalf miljard jaar oude zonnestelsel. Het is een 'primordiale' bouwsteen van planeetvorming, en een van de 17, 000 bekende Near-Earth asteroïden.
Op aarde, er zijn meteorieten met een samenstelling die lijkt op die van Ryugu, die worden gevonden in de Murchison Range, Australië. Echter, Matthias Grott van het DLR Institute of Planetary Research en verantwoordelijk voor het radiometer-experiment MARA is sceptisch over de vraag of deze meteorieten werkelijk representatief zijn voor Ryugu in termen van hun fysieke eigenschappen:"Meteorieten zoals die gevonden in Murchison zijn nogal massief. onze MARA-gegevens suggereren dat het materiaal op Ryugu iets poreuzer is. De onderzoeken zijn nog maar net begonnen, maar het is aannemelijk om aan te nemen dat kleine fragmenten van Ryugu de binnenkomst in de atmosfeer van de aarde niet intact zouden overleven."
Over de Hayabusa2-missie en MASCOT
Hayabusa2 is een missie van een Japans ruimteagentschap (Japan Aerospace Exploration Agency; JAXA) naar de nabije asteroïde Ryugu. De Duits-Franse lander MASCOT aan boord van Hayabusa2 is ontwikkeld door het Duitse Lucht- en Ruimtevaartcentrum (Deutsches Zentrum für Luft- und Raumfahrt; DLR) en gebouwd in nauwe samenwerking met het Franse ruimteagentschap CNES (Centre National d'Etudes Spatiales). DLR, het Institut d'Astrophysique Spatiale en de Technische Universiteit van Braunschweig hebben bijgedragen aan de wetenschappelijke experimenten aan boord van MASCOT. De MASCOT-lander en zijn experimenten worden bestuurd en bestuurd door DLR met ondersteuning van CNES en in constante interactie met het Hayabusa2-team.
Het DLR Institute of Space Systems in Bremen was samen met CNES verantwoordelijk voor het ontwikkelen en testen van de lander. Het DLR Institute of Composite Structures and Adaptive Systems in Braunschweig was verantwoordelijk voor de stabiele structuur van de lander. Het DLR Robotics and Mechatronics Center in Oberpfaffenhofen ontwikkelde de zwenkarm waarmee MASCOT op de asteroïde kan springen. Das DLR Institute of Planetary Research in Berlijn droeg de MASCAM-camera en de MARA-radiometer bij. De asteroïde lander wordt bewaakt en bediend vanuit het MASCOT Control Center in het Microgravity User Support Center (MUSC) op de DLR-locatie in Keulen.

Hoofdlijnen
- Wereldwijde explosie van wegenbouw kan rampzalig zijn voor mens en natuur, zeggen wetenschappers
- Ter verdediging van kamsalamanders - waarom deze ongrijpbare amfibieën de moeite waard zijn?
- Onderzoek onthult een nieuwe overlevingsstrategie in belangrijke bacteriën
- Team onthult regels voor het maken van ribben
- Neurale opnames van wilde vleermuizen onthullen een unieke organisatie van het middenhersenengebied voor het volgen en vangen van prooien
- Een eenvoudig diercelmodel maken
- Prehistorische vrouwen waren sterker dan de elite vrouwelijke atleten van vandaag
- Wetenschappers controleren cellen met licht,
- Hoe maak ik een 7e-graads schoolproject van een virusmodel?
- Oorsprong van Uranus-rariteiten verklaard door Japanse astronomen
- Watchdog bekritiseert stijgende kosten, vertragingen van NASA's volgende maanraket

- Juno vangt ongrijpbare bruine schuit

- Astronauten knijpen in laatste ruimtewandeling voor vertrek SpaceX

- De zoektocht naar leven op andere planeten kan een boost krijgen door biosignaturen

 Een manier om de absolute stereochemie van kleine, organische moleculen
Een manier om de absolute stereochemie van kleine, organische moleculen- Zeldzame zangvogel heeft misschien nooit bestaan
- Waardoor wordt algenbloei giftig?
- Hoe de molariteit van het mengen berekenen
- Te veel ongelijkheid belemmert steun voor publieke goederen
- Machine learning zoekt naar nuttige gegevens in rapporten over onweersbuien in de VS
- NASA ziet veel kracht in infraroodbeeld van cat four orkaan Walaka
- Down to the wire:goedkope techniek om hoogwaardige nanodraad-zonnecellen te maken ontwikkeld
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Swedish | German | Dutch | Danish | Norway | Italian | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
