Wetenschap
Deze transformerende rover kan het moeilijkste terrein verkennen

De DuAxel rover is hier te zien tijdens veldtesten in de Mojave-woestijn. De vierwielige rover is samengesteld uit twee Axel-robots. Het ene deel verankert zichzelf op zijn plaats, terwijl het andere een ketting gebruikt om anders ontoegankelijk terrein te verkennen. Krediet:NASA/JPL-Caltech/J.D. gammel
Een rover rolt over rotsachtig terrein, de vier metalen wielen rammelen voort totdat ze een schijnbaar onoverkomelijk gevaar tegenkomen:een steile helling. Beneden is een potentiële schat aan wetenschappelijke doelen. Met een typische rover, zouden de operators een ander doelwit moeten vinden, maar dit is DuAxel, een robot gebouwd voor precies dit soort situaties.
De rover is eigenlijk gemaakt van een paar tweewielige rovers, elk genaamd Axel. Om te verdelen en te heersen, de rover stopt, laat het chassis zakken en verankert het aan de grond voordat het in wezen in tweeën wordt gesplitst. Met de achterste helft van DuAxel (afkorting van "dual-Axel") stevig op zijn plaats, de voorste helft ontkoppelt en rolt weg op een enkele as. Het enige dat de twee helften nu met elkaar verbindt, is een ketting die loskomt als de voorste as het gevaar nadert en de helling afdaalt, met instrumenten die in de wielnaaf zijn opgeborgen om een wetenschappelijk aantrekkelijke locatie te bestuderen die normaal gesproken buiten bereik zou zijn.
Dit scenario speelde zich afgelopen herfst af tijdens een veldtest in de Mojave-woestijn, toen een klein team van ingenieurs van NASA's Jet Propulsion Laboratory in Zuid-Californië de modulaire rover door een reeks uitdagingen liet gaan om de veelzijdigheid van zijn ontwerp te testen.
"DuAxel presteerde buitengewoon goed in het veld, met succes demonstreert zijn vermogen om een uitdagend terrein te benaderen, Anker, en dan zijn vastgebonden Axel rover loskoppelen, " zei Issa Nesnas, een robotica-technoloog bij JPL. "Axel manoeuvreerde vervolgens autonoom steile en rotsachtige hellingen af, het inzetten van zijn instrumenten zonder de noodzaak van een robotarm."
Het idee achter het creëren van twee enkelassige rovers die kunnen worden gecombineerd tot één met een centraal laadvermogen, is om de veelzijdigheid te maximaliseren:de configuratie met vier wielen leent zich uitstekend voor het afleggen van grote afstanden door ruige landschappen; de tweewielige versie biedt een wendbaarheid die grotere rovers niet kunnen.
"DuAxel opent toegang tot extremer terrein op planetaire lichamen zoals de maan, Mars, Kwik, en mogelijk enkele ijzige werelden, zoals Jupiters maan Europa, ", voegde Nesnas eraan toe.
De flexibiliteit is gebouwd met kraterwanden, kuilen, littekens, ventilatieopeningen, en ander extreem terrein op deze diverse werelden in gedachten. Dat komt omdat op aarde, enkele van de beste locaties om geologie te bestuderen zijn te vinden in rotspartijen en op rotswanden, waar vele lagen van het verleden netjes worden blootgelegd. Ze zijn moeilijk genoeg om hier te komen, laat staan op andere hemellichamen.
De mobiliteit van de rover en het vermogen om toegang te krijgen tot extreme locaties is een verleidelijke combinatie voor Laura Kerber, een planetaire geoloog bij JPL. "Daarom vind ik de Axel rover best verrukkelijk, "zei ze. "In plaats van zichzelf altijd te beschermen tegen gevaren zoals vallen of omvallen, het is ontworpen om ze te weerstaan."

Tijdens dezelfde veldtest de DuAxel rover splitst zich in twee enkelassige robots, zodat men een helling kan afdalen die te steil is voor conventionele rovers. Krediet:NASA/JPL-Caltech/J.D. gammel
Een geschiedenis op twee wielen
Het radicale concept van twee robotvoertuigen die als één functioneren, stamt uit de late jaren negentig, toen NASA begon met het verkennen van ideeën voor modulaire, herconfigureerbaar, zelfherstellende rovers. Dit inspireerde Nesnas en zijn team bij JPL om de robuuste, flexibele tweewielige robot die bekend zou komen te staan als Axel.
Ze hadden een modulair systeem voor ogen:twee assen konden aan weerszijden van een lading aanmeren, bijvoorbeeld, of drie assen kunnen aanmeren op twee nuttige ladingen, enzovoort, het creëren van een "trein" van Axels die veel ladingen kan vervoeren. Dit concept voldeed ook aan de "zelfherstellende" eis van NASA's uitdaging:mocht één Axel falen, een ander zou zijn plaats kunnen innemen.
De ontwikkeling van Axel bleef tot 2006 gericht op modulair transport, toen satellietbeelden van het oppervlak van Mars geulen in kraterwanden onthulden. Later, de ontdekking van wat leek op seizoensgebonden uitstroom van vloeibaar water - donkere kenmerken die bekend staan als terugkerende hellingslijnen - verhoogde de interesse in het gebruik van robots om monsters te nemen. Wetenschappers wilden weten of geulen en terugkerende taludlijnen veroorzaakt werden door waterstromen of iets anders.
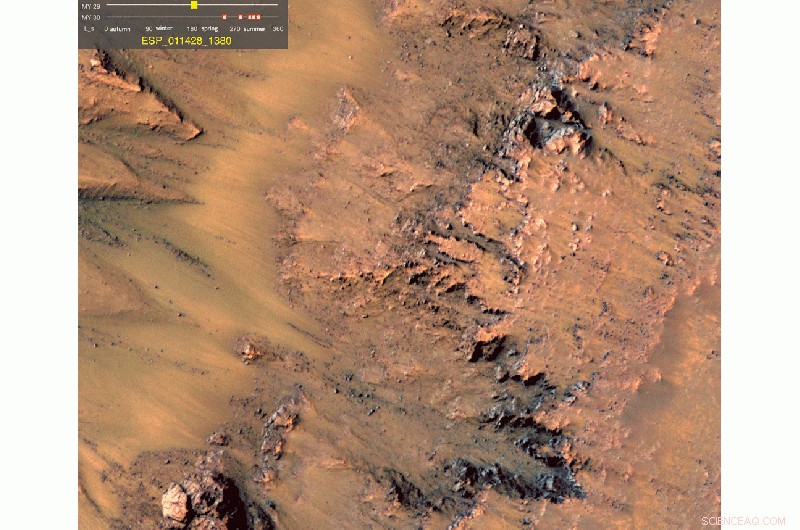
Tijdens warme seizoenen op Mars, donkere strepen genaamd "recurring slope lineae" verschijnen vaak op kraterhellingen, zoals te zien is in deze reeks waarnemingen vastgelegd door de HiRISE-camera aan boord van NASA's Mars Reconnaissance Orbiter. De DuAxel rover is ontworpen om naar dergelijke ontoegankelijke gebieden te abseilen om ze te bestuderen. Krediet:NASA/JPL-Caltech/Universiteit van Arizona
Maar de hellingen zijn te steil voor een conventionele rover - zelfs voor Curiosity of de binnenkort te landen Perseverance rover, beide zijn ontworpen om hellingen tot 30 graden te doorkruisen. Om deze functies rechtstreeks te verkennen, zou een ander soort voertuig nodig zijn.
Dus Nesnas en zijn team begonnen een versie van Axel te ontwikkelen die aan een lander zou worden vastgemaakt, de ketting niet alleen gebruiken om een kraterkant of steile kloofwand af te dalen, maar ook om stroom te leveren en met de lander te communiceren. De wielen kunnen worden uitgerust met extra hoge groeven, of treden, voor extra tractie, terwijl de wielnaven microscopen konden huisvesten, boren, monsterafname scoops, en andere instrumenten om het terrein te bestuderen. Draaien, de tweewielige as zou gewoon een van zijn wielen sneller draaien dan de andere.
Interesse in de flexibiliteit van het concept heeft geleid tot een ontluikende familie van tweewielige ontwerpen, inclusief NASA JPL's A-PUFFER en BRUIE, die de mogelijkheid van verkenning uitbreiden naar nieuwe bestemmingen en toepassingen, ook onder water op ijzige werelden.
Ondanks de veelzijdigheid van de vastgebonden Axel, er was een opmerkelijke beperking bij gebruik in combinatie met een stationaire lander:de lander zou zich binnen abseilenafstand van de kraterkant moeten bevinden - wat een mate van landingsprecisie vereist die misschien niet mogelijk is voor een planetaire missie.

De tweewielige Axel daalt de helling af terwijl hij vastgebonden is aan zijn tegenhanger die boven de helling verankerd is. De ketting dient als een soort klimtouw en biedt tegelijkertijd kracht en een communicatiemiddel. Krediet:NASA/JPL-Caltech/J.D. gammel
Om deze vereiste weg te nemen en de mobiliteit te vergroten, keerde het team terug naar het originele modulaire ontwerp, aangepast aan de nieuwe vastgebonden Axel, en noemde het DuAxel.
"Het belangrijkste voordeel van het gebruik van DuAxel wordt duidelijk gemaakt wanneer u onzeker bent over de landingsplaats, zoals we dat op Mars doen, of je wilt verhuizen naar een nieuwe locatie om te abseilen en te verkennen met Axel, " zei Patrick McGarey, een robottechnoloog bij JPL en teamlid van DuAxel. "Het maakt ongebonden rijden vanaf de landingsplaats mogelijk en zorgt voor tijdelijke verankering aan het terrein, omdat het in wezen een transformerende robot is die is gemaakt voor planetaire verkenning."
Terwijl DuAxel een technologiedemonstratie blijft en wacht om een bestemming toegewezen te krijgen, zijn team zal zijn technologie blijven verfijnen; op die manier, wanneer de tijd komt, de robot zou klaar zijn om te rollen waar andere rovers bang zijn om te betreden.
 Theoretische opbrengsten berekenen
Theoretische opbrengsten berekenen- Een verbeterde op ruthenium gebaseerde katalysator voor de synthese van primaire amines
- Werkzoekenden in de chemie hebben moeilijke vooruitzichten tijdens pandemie
- Vouwende eiwitten voelen de hitte, en koud
- De radicale manieren waarop zonlicht grotere moleculen in de atmosfeer bouwt
- Het verschuiven van de focus van klimaatveranderingsstrategieën kan de jongere generaties ten goede komen
- Giftige wolk veroorzaakt door Hawaï-vulkaanlava komt boven oceaan
- Onderzoek toont aan dat schaalmodellen effectief zijn voor het voorspellen van stormschade aan houten gebouwen
- Nieuw aardbevingsvoorspellingssysteem gaf betrouwbare voorspellingen van Italiaanse naschokken
- Wateroorlog verschuift naar het zuidwesten van Georgia terwijl Florida zich op boeren richt
Hoofdlijnen
- Glycolyse: definitie, stappen, producten en reactanten
- Studie kijkt naar de invloed van woonwerven op voedselwebben
- Hoeveel mogelijke combinaties van eiwitten zijn mogelijk met 20 verschillende aminozuren?
- Door het bedrijf gesponsorde klinische CRISPR-onderzoeken starten in 2018
- Wat gebeurt er met een dierlijke cel in een hypotone oplossing?
- Wat zijn de kleine delen van het DNA die Code for a Trait?
- Eukaryotische cel: definitie, structuur en functie (met analogie en diagram)
- Hoe orchideeën werken
- Nieuwe ontdekking:gewone kwallen zijn eigenlijk twee soorten
- SpaceX lanceert 4 amateurs op privé-rondreis om de aarde

- Met behulp van efficiënte lasertechnologie puin in de baan van de aarde tot op de centimeter nauwkeurig volgen
- Gedeeltelijke maansverduistering om de Britse avondhemel te sieren

- Zouten kunnen een belangrijk stuk van de organische puzzel van Mars zijn, wetenschappers vinden
- Afscheid van Sentinel-2B


 Van tv-streaming tot Gmail, het draait allemaal om de cloud
Van tv-streaming tot Gmail, het draait allemaal om de cloud- Hoe alchemie de weg vrijmaakte voor scheikunde
- Van ster tot zonnestelsel:hoe protoplanetaire ringen zich vormen in oergaswolken
- Vreemde ondernemingen:mierenkoninginnen begraven doden om ziekte te voorkomen
- Onderzoek toont aan dat grootte de structuur van holle nanodeeltjes beïnvloedt
- Afbeelding:coronale gaten
- Wetenschappers ontdekken exotische materie in de atmosfeer van de zon
- Gegevens van antipodale plaatsen:eerste gebruik van CMB-polarisatie om zwaartekrachtlensing van clusters van sterrenstelsels te detecteren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
