Wetenschap
Wetenschappers bereiken femtoseconde laserfabricage van magnetisch reagerende Janus-origami-robots
De veelzijdige manipulatie van druppels op verschillende schaalniveaus is veelbelovend op verschillende gebieden, met name op het gebied van precisiechemie en biomedische diagnostiek. Vanuit praktisch oogpunt vereisen effectieve druppelmanipulatietechnieken multifunctionele integratie en toepasbaarheid op verschillende schaalniveaus.
Magnetische excitatie is op grote schaal toegepast op het gebied van druppelmanipulatie vanwege de voordelen ervan, zoals bestuurbaarheid op afstand, biocompatibiliteit, ongevoeligheid voor omgevingsfactoren zoals substraatlading en uitstekende transparantie. Het uitbreiden van de mogelijkheden van magnetisch responsieve druppelmanipulatie en het uitbreiden van de diverse functionaliteiten van microliter- tot nanoliterschalen blijven echter enorme uitdagingen.
Als antwoord op deze uitdaging ontwikkelden professor Hu Yanlei en zijn onderzoeksteam van het Micro/Nano Engineering Laboratory van de University of Science and Technology of China (USTC) van de Chinese Academy of Sciences (CAS), in samenwerking met andere onderzoekers, een magnetisch aangedreven Janus-origamirobot met behulp van femtoseconde laser-nanofabricagetechnieken.
Deze robot maakt effectieve integratie mogelijk van diverse functionaliteiten voor druppelmanipulatie, waaronder driedimensionaal druppeltransport, samenvoegen, splitsen, nauwkeurige dosering en on-demand vrijgave van dochterdruppels, evenals roeren en verwarming op afstand.
Bovendien vertoont deze manipulatiestrategie opmerkelijke stabiliteit en maakt de manipulatie van druppeltjes mogelijk met volumes van ongeveer 3,2 nanoliter tot ongeveer 51,14 microliter. De resultaten van dit onderzoek, getiteld "Magnetic Janus origami robot for cross-scale droplet omni-manipulation", zijn gepubliceerd in Nature Communications .
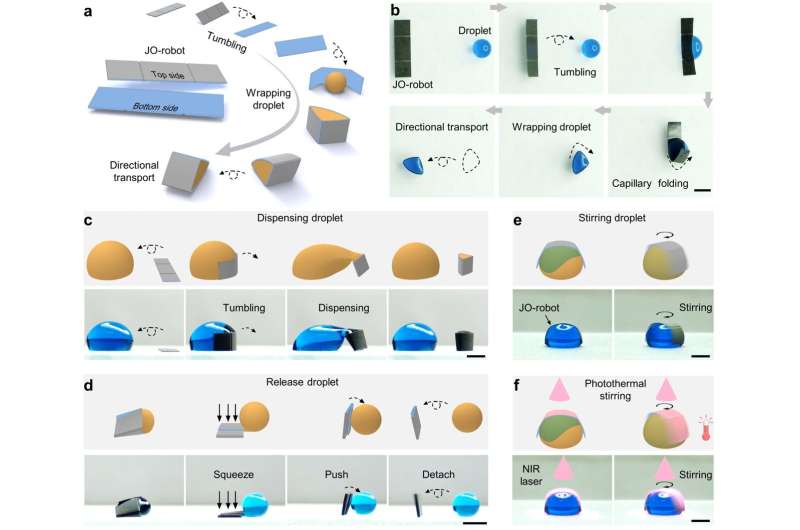
De bovenste en onderste oppervlakken van de magnetisch reagerende dubbellaagse Janus-origamirobot vertonen duidelijke bevochtigingseigenschappen. Het bovenoppervlak van de robot bevindt zich in een superhydrofobe toestand met een lage druppeladhesie, terwijl het onderoppervlak hydrofoob is met een hoge druppeladhesie.
Tegelijkertijd worden er twee vouwen op het bovenoppervlak van de robot ontworpen om de spontane omhulling van druppels onder capillaire krachten bij contact te vergemakkelijken. Het algehele profiel, de vouwen en de micro-/nano-functionele structuren van de robot worden vervaardigd en aangepast door middel van femtoseconde laserscanning.
Aangedreven door een magnetisch veld nadert de robot actief waterdruppels en kapselt deze in door te rollen, waardoor gecontroleerd druppeltransport mogelijk wordt. Bovendien kan de magnetisch reagerende dubbellaagse Janus-origamirobot dochterdruppels van grotere druppels verdelen door middel van gericht rollen en vouwen.
Door de magnetische veldsterkte te regelen, kunnen de verdeelde dochterdruppeltjes uit de robot worden geëxtrudeerd. Door gebruik te maken van de speciaal ontworpen superhydrofobe buitenkant duwt de robot zachtjes druppels voor gecontroleerde vrijgave en scheiding. De robot kan ook roteren onder invloed van het magnetische veld, waardoor een gecontroleerde vloeistofmenging wordt bereikt en, in combinatie met zijn fotothermische eigenschappen, verwarming op afstand mogelijk wordt.
Magnetisch reagerende Janus-origami-robots zijn ontwikkeld om veelzijdige druppelmanipulatie over de schaal mogelijk te maken, en bieden functies die lijken op commerciële magnetische roerders. Naast het snel mengen van water, beschikken deze robots over het vermogen om vloeistoffen met een hoge viscositeit, zoals glycerol, effectief te mengen via hun verwarmings- en roerfuncties, waarbij temperaturen van boven de 80°C worden bereikt.
Voortbouwend op hun diverse mogelijkheden voor druppelmanipulatie, integreren de magnetisch reagerende Janus-origami-robots naadloos verschillende druppelverwerkingsfunctionaliteiten om continue druppelmanipulatiedoelstellingen te bereiken. De robots benaderen bijvoorbeeld autonoom waterdruppels door middel van rollende bewegingen, geven specifieke volumes dochterdruppeltjes af, transporteren deze afgegeven dochterdruppeltjes om samen te smelten met andere druppels, en vergemakkelijken uiteindelijk een snelle menging van druppels met verschillende componenten door middel van roeren. Deze multifunctionele integratie van druppelmanipulatie strekt zich naadloos uit tot op nanoliterschaal.
In een proof-of-concept-demonstratie slaagden de robots, na oppervlaktemodificaties, met succes in de extractie en zuivering van nucleïnezuren.
Samenvattend maken magnetisch reagerende Janus-origami-robots druppelmanipulatie op meerdere schaal mogelijk, wat aanzienlijke gevolgen heeft voor de precieze afgifte van reagentia, microdruppelpatronen en snelle microdruppelreacties op diverse gebieden, zoals fijne chemische technologie, medische diagnostiek en microfluïdische technologieën.
Meer informatie: Shaojun Jiang et al., Magnetische Janus-origamirobot voor omni-manipulatie van druppels op meerdere schaal, Nature Communications (2023). DOI:10.1038/s41467-023-41092-1
Journaalinformatie: Natuurcommunicatie
Aangeboden door de Universiteit voor Wetenschap en Technologie van China
 Wetenschappers vervaardigen composieten die hoge sterkte en bioactiviteit combineren, geïnspireerd op het corticale bot
Wetenschappers vervaardigen composieten die hoge sterkte en bioactiviteit combineren, geïnspireerd op het corticale bot - Unieke medicijnstructuren vinden met kunstmatige intelligentie en chemie
- Intelligentie die voortkomt uit willekeurige polymeernetwerken
- Hoe graden te berekenen in de Baume-schaal
- Waarom verandert het citroensap papier bruin?
- Witte daken en meer groen zouden de effecten van hittegolven in steden verminderen
- Een wetenschapsbeursproject over heremietkreeften
- Het is tijd om accountants te trainen in duurzaamheid
- Vergiftigingsgevallen bederven het bod van India om een wereldwijde hub voor pesticiden te worden
- NASA ziet een zwakkere, langgerekte tropische depressie Kai-Tak
Hoofdlijnen
- Biologen tonen aan dat de enige longloze kikkersoort inderdaad longen heeft
- Biologen onderzoeken de moleculaire onderbouwing van cellen die herstellen van de rand van geprogrammeerde dood
- Wat is de levensduur van uw hond? Het zal je misschien verbazen
- Drie artikelen helpen de code van co-enzym Q-biosynthese te kraken
- Profase: wat gebeurt er in dit stadium van mitose en meiose?
- Studie onderstreept nieuwe strategieën om resistente bacteriën te bestrijden
- Van wortels tot veerkracht:onderzoek naar de vitale rol van microben in de gezondheid van kustplanten
- Het beperkte aanpassingsvermogen maakt zoetwaterbacteriën kwetsbaar voor klimaatverandering
- Verbeterde CRISPR-methode maakt stabiele invoeging van grote genen in het DNA van hogere planten mogelijk
- Grafeenschuim:gezellige en geleidende steigers voor neurale stamcellen
- Koolstof nanobuisjes kweken met de juiste twist

- Genereren en manipuleren van spinstromen voor geavanceerde elektronische apparaten
- Nanodeeltjes bewapenen voor diagnose en behandeling van kanker

- Ultrasnelle op grafeen gebaseerde fotodetectoren met datasnelheden tot 50 GBit/s

 Nieuwe bevindingen suggereren dat natuurwetten ronduit raar zijn, niet zo constant als eerder werd gedacht
Nieuwe bevindingen suggereren dat natuurwetten ronduit raar zijn, niet zo constant als eerder werd gedacht- Wetenschappers zeggen dat ze emissievrij cement kunnen maken
- Waar het begint:jonge hongerige sprinkhanen stapelen zich op in Somalië
- Wat als onze geschiedenis in onze grammatica was geschreven?
- Natuurlijk hittebestendige koralen die naar kwekerijen zijn getransplanteerd, overleven El Nino-blekingsgebeurtenis
- Robots geactiveerd door water kunnen de volgende grens zijn
- Wetenschappers kweken hazelnoten als het volgende geldgewas voor boeren in het Midwesten
- Smartphonecamera's gebruiken om alertheid bij te houden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
