Wetenschap
Robotisch grijpmechanisme bootst na hoe zeeanemonen een prooi vangen

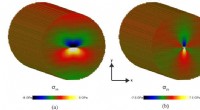
Onderzoekers in China demonstreerden een robotachtig grijpmechanisme dat nabootst hoe een zeeanemoon zijn prooi vangt. De bionische torus vangt objecten op en laat ze los door de huid te plooien. De grijper is niet alleen relatief goedkoop en gemakkelijk te produceren, maar kan ook een verscheidenheid aan objecten van verschillende groottes pakken, vormen, gewichten en materialen. Ze bespreken hun werk in de Applied Physics Letters van deze week. Deze afbeelding toont een eenvoudig prototype dat het aanpassingsvermogen van de grijper aan verschillende objecten laat zien. Krediet:Weifeng Yuan
De meeste robotgrijpmechanismen tot nu toe vertrouwden op mensachtige vingers of aanhangsels, die soms moeite hebben om de fijne kneepjes te geven, flexibiliteit of kosteneffectiviteit die in sommige omstandigheden nodig is om objecten vast te houden. Recent werk lijkt een weg voorwaarts te bieden voor het grijpen van robots uit een onwaarschijnlijke bron - de donutvormige zeeanemoon.
Onderzoekers van de Southwest University of Science and Technology en Tsinghua University in China demonstreerden een robotachtig grijpmechanisme dat nabootst hoe een zeeanemoon zijn prooi vangt. De bionische torus vangt objecten op en laat ze los door de huid te plooien. De grijper is niet alleen relatief goedkoop en gemakkelijk te produceren, maar kan ook een verscheidenheid aan objecten van verschillende groottes pakken, vormen, gewichten en materialen. Ze bespreken hun werk in de Technische Natuurkunde Brieven .
"In industrieën, behendige handen met meerdere vingers worden veel gebruikt om grijptaken uit te voeren. Echter, deze end-effectors bestaan uit een groot aantal componenten, zoals gewrichten en sensoren, die moeilijk te controleren zijn, " zei auteur Weifeng Yuan.
De thermoplastische rubberen huid die de buitenkant van de met vloeistof gevulde ring bekleedt, rolt naar binnen wanneer de binnenhuid van de grijper een trekkracht ervaart, het opzuigen van welk doelwit dan ook dat wordt gegrepen.
Onderzoekers kunnen verschillende kenmerken van de torus aanpassen, zoals de rolrichting en lengte van de huid, om te controleren of items worden verzwolgen, ingeslikt of losgelaten.
"We ontdekten dat zeeanemonen zeedieren met verschillende vormen en maten kunnen vangen, dus besloten we het mechanisme van de predatiestrategie te onderzoeken, en we geloofden dat de studie nuttig zou zijn voor het ontwerp van adaptieve zachte grijpers, ' zei Yuan.
De groep demonstreerde het apparaat door op objecten te klikken, variërend van een stuk stof tot een mobiele telefoon tot een glazen beker gevuld met vloeistof.
Yuan zei dat een flexibele grijper het potentieel heeft om kwetsbare objecten in nauwe ruimtes of extreme, omgevingen onder hoge druk, zoals het verzamelen van monsters van diepzee-organismen of transportleidingen. Bovendien, de grijper kan ook op nanoschaal worden gebouwd om individuele cellen te manipuleren. Yuan ziet potentie in de ontwikkeling van chirurgische instrumenten.
"Onze grijper kan de ene minuut een stalen staaf van een tafel pakken en de volgende minuut een ei uit een mand zonder de controleparameters opnieuw in te stellen, ' zei Yuan.
De groep hoopt het potentieel van zo'n uniek apparaat verder uit te werken, zoals het verhogen van de sterkte-gewichtsverhouding door lucht te gebruiken in plaats van vloeistoffen.

Hoofdlijnen
- Wat zijn de drie belangrijkste verschillen tussen een plantencel en een dierencel?
- De microbiologische kunst van het maken van een betere worst
- Hoe de immuunrespons bijdraagt aan Homeostasis
- Wat is de functie van aerobe ademhaling?
- Onderzoekers vinden eerste wilde alligator brekende schildpad in Illinois sinds 1984
- Alle informatie die nodig is om proteïnen te maken is gecodeerd in DNA door wat?
- Hoe werkt het plasmamembraan Homeostasis?
- Effecten van de microscoop op Science
- Hersenloos,
- Om kwantumnetwerken te ontwikkelen, de unieke behoeften van de industrie moeten worden overwogen en kunnen een oplossing bieden

- De boosdoener van sommige GaN-defecten kan stikstof zijn
- Nieuwe methode om ultrasnelle verandering van magnetische toestand te volgen
- De toekomst van draadloze communicatie is terahertz
- Wat veroorzaakt de dag /nacht-cyclus op aarde?


 Spinnen op nanoschaal:moleculen die zich gedragen als robots
Spinnen op nanoschaal:moleculen die zich gedragen als robots- Onderzoekers synthetiseren nanodeeltjes op maat gemaakt voor speciale toepassingen
- Triplex-signaal chemosensor voor detectie met het blote oog en spectrometrische lead
- Het Rendlesham Forest-incident
- Geheugen- en weergavefuncties gebruiken op een wetenschappelijke calculator
- Moleculen bewegen sneller in de buurt van plakkerige oppervlakken
- Studie benadrukt de rol van epifytische bacteriën in het arseenmetabolisme in hydrilla verticillata
- Computeren met moleculen:een grote stap in moleculaire spintronica
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
