Wetenschap
Hoe een slanke, slangachtige robot artsen nieuwe manieren kan bieden om levens te redden
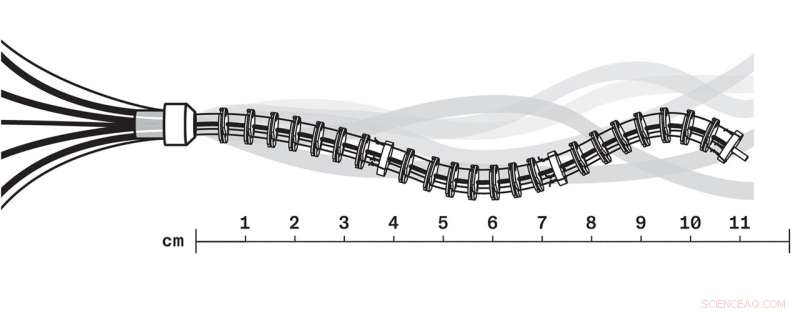
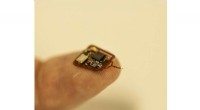
De hier afgebeelde "door pezen aangedreven" continuümrobots hebben in het echt een diameter van ongeveer zeven millimeter en zijn gebouwd in secties die in lengte kunnen variëren van 15 tot 70 millimeter. Andere modellen kunnen nog smaller zijn. Alle vertonen een tentakel-achtige beweging. Krediet:Universiteit van Toronto
Jessica Burgner-Kahrs, de directeur van het Continuum Robotics Lab aan de Universiteit van Toronto Mississauga, en haar team bouwen zeer slanke, flexibele en uitbreidbare robots, met een diameter van enkele millimeters, voor gebruik in de chirurgie en de industrie. Je zou het 'zoöbotica' kunnen noemen.
In tegenstelling tot humanoïde robots hebben zogenaamde continuümrobots lange, ledematenloze lichamen - niet anders dan die van een slang - waarmee ze moeilijk bereikbare plaatsen kunnen bereiken.
Overweeg een neurochirurg die een hersentumor moet verwijderen. Met behulp van een traditioneel, rigide chirurgisch instrument moet de chirurg de kankergezwel bereiken door een recht pad in de hersenen te volgen en het risico te lopen door vitaal weefsel te prikken en het te beschadigen.
Burgner-Kahrs, universitair hoofddocent wiskundige en computationele wetenschappen aan de U of T Mississauga, stelt zich een dag voor waarop een van haar slangachtige robots, geleid door een chirurg, een kronkelend pad rond het vitale weefsel zou kunnen nemen, maar toch de precieze operatieplaats. Hersentumoren die voorheen onbruikbaar waren, kunnen plotseling operabel worden.
"Het kan een revolutie teweegbrengen in de chirurgie", zegt ze.
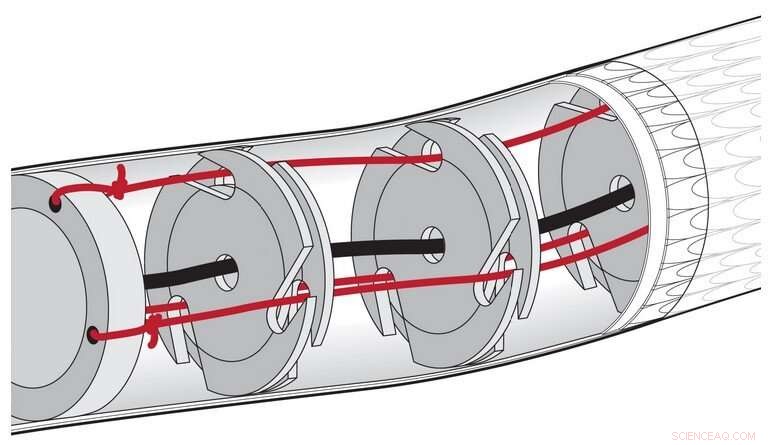
Draden die door het "lichaam" van de robot lopen, worden bevestigd aan een dikkere schijf aan het einde van elk lichaamssegment. Aan deze draden wordt getrokken om afzonderlijke segmenten van de robot te besturen en in verschillende richtingen te buigen. Magneten in elke schijf, gerangschikt met afwisselende polariteiten, zorgen ervoor dat de schijven op gelijke afstand blijven, ongeacht de lengte van het robotsegment. Dit helpt de robot om naar wens te buigen en een kromlijnig pad af te leggen in een "volg-de-leider" -beweging - het slangachtige "lichaam" volgt het pad van het "hoofd". Het lab heeft een omhulsel van overlappende schubben ontwikkeld, ingeklemd tussen twee lagen siliconen. Wanneer er een vacuüm wordt aangebracht tussen de siliconenlagen, wordt de normaal flexibele robot stijf. Krediet:Colin Hayes
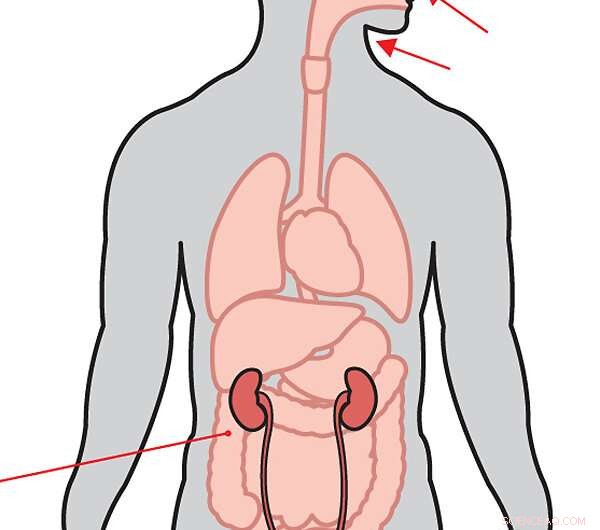
Burgner-Kahrs, een computerwetenschapper en werktuigbouwkundig ingenieur, zegt dat haar laboratorium ook een meer geavanceerde generatie continuümrobots ontwikkelt die zijn uitgerust met sensoren en zichzelf gedeeltelijk kunnen sturen. Een chirurg zou de robot op afstand moeten bedienen met een computer, maar de robot zou obstakels kunnen ontwijken en zijn bestemming herkennen. Een chirurg kan een van deze robots inzetten om bijvoorbeeld een weefselmonster uit de buik te nemen of een kankermedicijn rechtstreeks in een tumor in de longen te injecteren.
Er zijn ook toepassingen buiten het menselijk lichaam.
Burgner-Kahrs ontwikkelt verschillende soorten continuümrobots die kunnen worden gebruikt bij kijkoperaties, waardoor patiënten nog minder trauma oplopen dan de huidige minimaal invasieve chirurgische technieken. Krediet:Colin Hayes
Een continuümrobot kan door het interieur van een straalmotor glijden en deze op schade inspecteren. Het lab experimenteert met nieuwe vormen die nog handiger en uitbreidbaarder zijn. Een recent ontwerp, met mogelijke zoek- en reddingstoepassingen, is geïnspireerd op origami:het is erg licht en kan tot 10 keer langer worden verlengd dan andere ontwerpen.
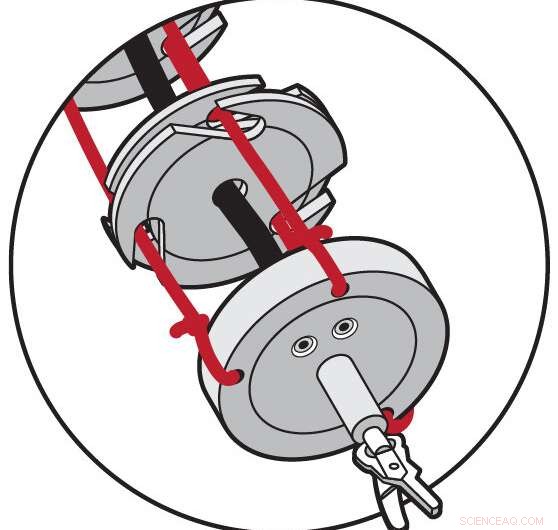
De robots kunnen worden uitgerust met camera's, zodat de operator kan zien waar de robot zich bevindt. Kleine chirurgische instrumenten kunnen naar behoefte worden gemonteerd, waaronder een tang, een laser of een afzuigapparaat. Krediet:Colin Hayes
Volgende generatie continuümrobots
Om robots te ontwikkelen die veilig kunnen worden gebruikt in een verscheidenheid aan medische en andere toepassingen, wil Burgner-Kahrs de volgende vragen beantwoorden:
- Hoe kunnen we continuümrobots besturen zodat ze nog preciezer door beperkte en kronkelige omgevingen bewegen?
- Hoe kunnen we een meer intuïtieve interface tussen mens en robot ontwerpen? Kunnen we een volledig autonome robot realiseren?
- Hoe kunnen we meerdere continuümrobots tegelijk gebruiken om samen een taak uit te voeren?
Hoe een slanke, slangachtige robot artsen nieuwe manieren kan bieden om levens te redden
 Sterke kunstmatige spieren van koolstofvezel kunnen 12 optillen, 600 keer hun eigen gewicht
Sterke kunstmatige spieren van koolstofvezel kunnen 12 optillen, 600 keer hun eigen gewicht- Nieuwe katalysator overtreft platina voor de productie van waterstof
- Dioxaan-kauwende microbe heeft een nuttig gen
- Nieuwe methode stimuleert de vorming van syngas uit biopolyolen
- Onderzoekers bereiken doorbraak in 3D-geprint roestvrij staal van mariene kwaliteit
- Satellietgegevens onthullen banden tussen emissies, vervuiling en economie
- Onderzoek toont aan dat de Falklandeilanden potentieel CO2-negatief kunnen worden
- China lanceert volgende maand een regeling voor de handel in koolstofemissies
- Hoe u een 14-daagse weersvoorspelling online krijgt
- meer dan 160, 000 mijl rivieren lopen het risico hun vrij stromende status te verliezen door dammen
Hoofdlijnen
- Wetenschappers beginnen gedurfde pogingen tot instandhouding om de vaquita-bruinvis van uitsterven te redden
- Cytoplasma: definitie, structuur en functie (met diagram)
- Sectie van DNA of RNA dat niet codeert voor eiwitten
- Dit is wat de wetenschap zegt over dierengevoel
- Lege schelpen van weekdieren bevatten het verhaal van evolutie, zelfs voor uitgestorven soorten - nu kunnen we het decoderen
- Brigitte Macron viert eerste panda geboren in Frankrijk
- Gekapte tropische regenwouden ondersteunen nog steeds de biodiversiteit, zelfs als de hitte aan staat
- Orgelsystemen betrokken bij homeostase
- Welk Genotype zijn vrouwen?





 Snellere ontdekking van medicijnen om onbetrouwbare doelen te bereiken
Snellere ontdekking van medicijnen om onbetrouwbare doelen te bereiken- China stelt lancering uit om GPS-achtig Beidou-netwerk te voltooien
- Geheimen van de overdracht van COVID-19 onthuld in turbulente trekjes
- Investeringen in de autosector in het VK storten in door de impact van de Brexit:gegevens uit de sector
- Hoe leeftijd berekenen in maanjaren
- Wetenschappers ontdekken aanwijzing in het geval van het ontbrekende zilver
- Amerikaanse infrastructuur niet voorbereid op toenemende frequentie van extreme stormen
- Nieuwe urgentie in strijd om Florida Everglades te herstellen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
