Wetenschap
Een kleine, magnetisch aangedreven versnellingsbak die microrobots meer kracht geeft
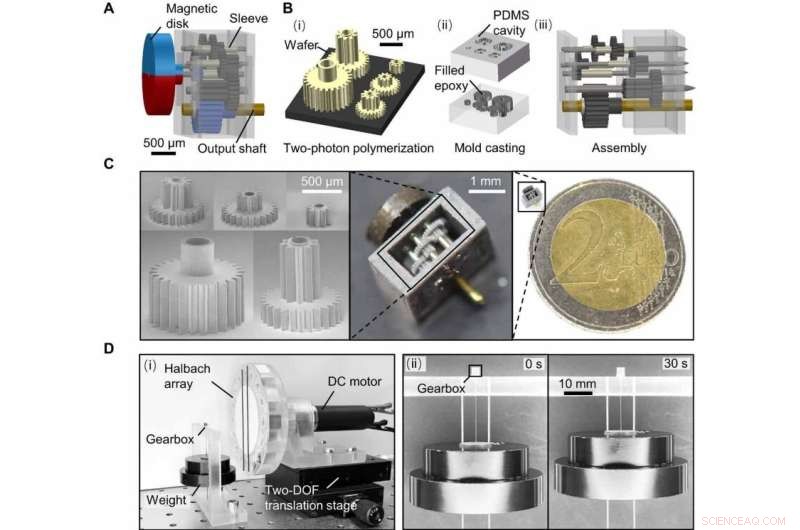
Ontwerp en prestaties van de magnetisch bediende miniatuurversnellingsbak voor magnetische aandrijvingen op millimeterschaal. Krediet:Wetenschapsrobotica (2022). DOI:10.1126/scirobotics.abo4401
Een team van onderzoekers van het Max Planck Institute for Intelligent Systems heeft in samenwerking met een paar collega's van het Harbin Institute of Technology een kleine aangedreven versnellingsbak ontwikkeld die kan worden gebruikt om zeer kleine robots meer vermogen te geven. In hun paper gepubliceerd in het tijdschrift Science Robotics, de groep beschrijft hoe hun versnellingsbak werkt en de vermogensverbeteringen die zijn waargenomen in verschillende soorten kleine robots.
De afgelopen jaren hebben wetenschappers gewerkt aan de ontwikkeling van kleine robots die in het menselijk lichaam kunnen worden geïnjecteerd om medische procedures uit te voeren. De hoop is dat dergelijke robots kunnen worden gestuurd om bijvoorbeeld kankergezwellen te vinden en te vernietigen. Zulke kleine robots zijn te klein om hun eigen energiecentrale te dragen; dus moeten ze worden gemanipuleerd met behulp van een extern magnetisch veld. Helaas, naarmate de robots steeds kleiner worden, neemt hun kracht af omdat ze te weinig massa hebben. In deze nieuwe poging hebben de onderzoekers een manier gevonden om de kracht van de kleine robots te vergroten met behulp van een kleine versnellingsbak die hen helpt sterker te worden.
De versnellingsbak wordt geleverd met een magneet aan het uiteinde om de kracht in een magnetisch veld via de tandwielen in de doos te benutten. En de versnellingsbak kan de kracht van een robot vergroten met behulp van slimme functies, waaronder elastische componenten en mechanische verbindingen.
Om de versnellingsbak te gebruiken, moeten de kleine robots zo worden gebouwd dat ze ervan kunnen profiteren. Door bijvoorbeeld elastische componenten te combineren met mechanische verbindingen, kan veerachtige energie druk opbouwen en vervolgens in één keer weer loslaten. De mechanische verbindingen dienen om de elastische componenten op hun plaats te houden totdat het tijd is om de energie vrij te geven.
Om hun idee te testen, bouwden de onderzoekers doosachtige structuren met elastische wanddelen die langzaam werden samengedrukt door de versnellingsbak wanneer deze werd blootgesteld aan een magnetisch veld. Een mechanische verbinding hield de muren op hun plaats om de druk op te bouwen. Toen een bepaalde druk was bereikt, werden de wanden losgelaten, waardoor de robot in een gewenste richting werd geduwd. Om een robot te maken, werden verschillende doosachtige structuren aan elkaar gehaakt. Met behulp van deze aanpak waren de onderzoekers in staat om lierachtige robots te maken die tot 103 gram konden tillen, of springers die 119 millimeter bereikten. Ze creëerden ook rupsbanden en klemmen. + Verder verkennen
Kijk naar kleine elektromechanische robots die sneller zijn dan cheeta's vanwege hun formaat
© 2022 Science X Network
 Olie opruimen met magneten
Olie opruimen met magneten- Onderzoekers vinden een verrassing net onder het oppervlak in een koolstofdioxide-experiment
- Nieuwe theorie over kruisverschijnselen kan de effectiviteit van nieuwe materialen voorspellen
- Van orkanen tot aardbevingen, ruimtestation experiment overwint uitdagingen
- De effecten van zout op ijsblokjes
- Griekse megabranden wijzen op mislukking in voorbereiding deskundigen zeggen
- Rubber-legumineuze struiksystemen moeten worden gepopulariseerd om de uitstoot van broeikasgassen in Xishuangbanna te verminderen
- Verbeterde algoritmen helpen wetenschappers bosbranden vanuit de ruimte te volgen
- Inzicht krijgen in de energiebalans van aardbevingen
- Psychologie is de sleutel om mensen eruit te krijgen voordat het noodlot toeslaat
Hoofdlijnen
- Hoe de immuunrespons bijdraagt aan Homeostasis
- Fase waarin de Nucleus & Nucleolus zijn hervormd
- Alfred Russel Wallace: Biography, Theory of Evolution & Facts
- Vijf belangrijke orgaansystemen van het lichaam
- Regenboogpauwspinnen kunnen nieuwe optische technologieën inspireren
- Hoe verschillende mierensoorten in hetzelfde territorium naast elkaar bestaan
- Hoe dieren stemmen om groepsbeslissingen te nemen
- Cytoplasma: functie en feiten
- Geen hondenleven voor oudere dieren in Singapore Zoo
- Elektriciteitsmarkt verandert snel, maar veiligheid een zorg

- Machines ontwerpen die zien, hun omgeving begrijpen en interpreteren

- Mede-oprichters van de achterpagina, leidinggevenden aangeklaagd wegens prostitutiekosten

- Rolls-Royce waarschuwt voor Brexit-onzekerheid

- Idaho, Energieministerie tekent deal over verbruikte splijtstof


 Autonoom Waymo-voertuig betrokken bij ongeval met 5 auto's in Arizona
Autonoom Waymo-voertuig betrokken bij ongeval met 5 auto's in Arizona- Erosiesnelheden bepalen via schilderen
- Groeiend vuur toont potentieel voor explosief Noordwest-seizoen
- Nanodiamantproductie in omgevingsomstandigheden opent deur voor flexibele elektronica, implantaten en meer
- Facebook bouwt datacenter van $ 1 miljard in Singapore eerst in Azië
- Principes van hefbomen
- Arctische onderzoekscruise in het late seizoen onthult warme oceaantemperaturen, actief ecosysteem
- Lancering van satelliet vanuit Californië is vertraagd
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
