Wetenschap
Systeem traint auto's zonder bestuurder in simulatie voordat ze de weg op gaan
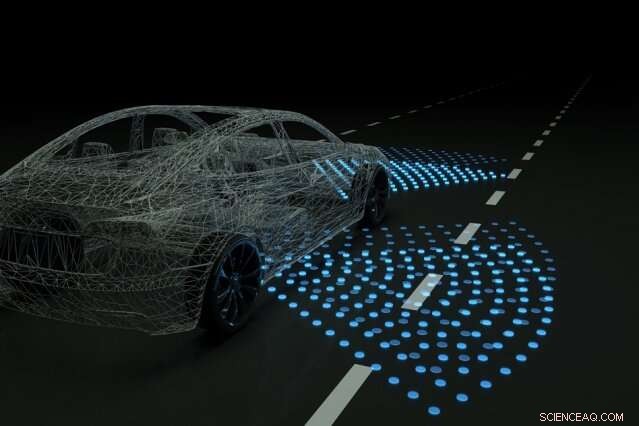
Een aan het MIT uitgevonden simulatiesysteem om auto's zonder bestuurder te trainen, creëert een fotorealistische wereld met oneindige stuurmogelijkheden, helpen de auto's te leren navigeren door een groot aantal slechtere scenario's voordat ze door echte straten rijden. Krediet:Massachusetts Institute of Technology
Een aan het MIT uitgevonden simulatiesysteem om auto's zonder bestuurder te trainen, creëert een fotorealistische wereld met oneindige stuurmogelijkheden, helpen de auto's te leren navigeren door een groot aantal slechtere scenario's voordat ze door echte straten rijden.
Controlesystemen, of "controleurs, " voor autonome voertuigen zijn grotendeels afhankelijk van real-world datasets van rijtrajecten van menselijke bestuurders. Uit deze gegevens, ze leren hoe ze veilige stuurbedieningen kunnen emuleren in verschillende situaties. Maar real-world gegevens van gevaarlijke "randgevallen, " zoals bijna crashen of van de weg worden geduwd of in andere rijstroken, zijn - gelukkig - zeldzaam.
Sommige computerprogramma's, genaamd "simulatiemotoren, " probeer deze situaties na te bootsen door gedetailleerde virtuele wegen weer te geven om de controllers te helpen herstellen. Maar het is nooit aangetoond dat de aangeleerde besturing van simulatie wordt omgezet in de realiteit op een voertuig op ware grootte.
De MIT-onderzoekers pakken het probleem aan met hun fotorealistische simulator, genaamd Virtual Image Synthesis and Transformation for Autonomy (VISTA). Het gebruikt slechts een kleine dataset, gevangen genomen door mensen die op een weg rijden, om een praktisch oneindig aantal nieuwe gezichtspunten te synthetiseren uit trajecten die het voertuig in de echte wereld zou kunnen nemen. De controller wordt beloond voor de afstand die hij aflegt zonder te crashen, het moet dus zelf leren hoe het veilig een bestemming kan bereiken. Daarbij, het voertuig leert veilig te navigeren in elke situatie die het tegenkomt, inclusief het terugkrijgen van de controle na uitwijken tussen rijstroken of herstellen van bijna-ongelukken.
Bij testen, een controller die veilig was getraind in de VISTA-simulator, kon veilig worden ingezet op een volledige auto zonder bestuurder en om door voorheen onzichtbare straten te navigeren. Bij het positioneren van de auto in offroad-oriëntaties die verschillende bijna-crashsituaties nabootsten, de controleur was ook in staat om de auto binnen enkele seconden met succes weer in een veilige rijbaan te krijgen. Een paper waarin het systeem wordt beschreven, is gepubliceerd in IEEE Robotica en automatiseringsbrieven en zal worden gepresenteerd op de komende ICRA-conferentie in mei.
"Het is moeilijk om gegevens te verzamelen in deze randgevallen die mensen onderweg niet ervaren, " zegt eerste auteur Alexander Amini, een doctoraat student in het Computer Science and Artificial Intelligence Laboratory (CSAIL). "In onze simulatie echter, besturingssystemen kunnen die situaties ervaren, leer er zelf van te herstellen, en robuust blijven wanneer ze worden ingezet op voertuigen in de echte wereld."
Het werk werd gedaan in samenwerking met het Toyota Research Institute. Naast Amini op het papier staan Igor Gilitschenski, een postdoc bij CSAIL; Jacob Philips, Julia Moseyko, en Rohan Banerjee, alle studenten in CSAIL en het Department of Electrical Engineering and Computer Science; Sertac Karaman, een universitair hoofddocent luchtvaart en ruimtevaart; en Daniela Rus, directeur van CSAIL en de Andrew en Erna Viterbi hoogleraar elektrotechniek en computerwetenschappen.
Gegevensgestuurde simulatie
historisch, Het bouwen van simulatiemotoren voor het trainen en testen van autonome voertuigen was grotendeels een handmatige taak. Bedrijven en universiteiten hebben vaak teams van kunstenaars en ingenieurs in dienst om virtuele omgevingen te schetsen, met nauwkeurige wegmarkeringen, rijstroken, en zelfs gedetailleerde bladeren aan bomen. Sommige motoren kunnen ook de fysica van de interactie van een auto met zijn omgeving bevatten, gebaseerd op complexe wiskundige modellen.
Maar omdat er zoveel verschillende dingen zijn om rekening mee te houden in complexe omgevingen in de echte wereld, het is praktisch onmogelijk om alles in de simulator op te nemen. Om die reden, er is meestal een mismatch tussen wat controllers leren in simulatie en hoe ze in de echte wereld werken.
In plaats daarvan, de MIT-onderzoekers creëerden wat zij een "data-driven" simulatie-engine noemen die synthetiseert, van echte gegevens, nieuwe trajecten die consistent zijn met het wegbeeld, evenals de afstand en beweging van alle objecten in de scène.
Ze verzamelen eerst videogegevens van een mens die een paar wegen afrijdt en voeren die in de motor. Voor elk kader, de engine projecteert elke pixel in een soort 3D-puntenwolk. Vervolgens, ze plaatsen een virtueel voertuig in die wereld. Wanneer het voertuig een stuurcommando geeft, de engine synthetiseert een nieuw traject door de puntenwolk, gebaseerd op de stuurcurve en de oriëntatie en snelheid van het voertuig.
Vervolgens, de engine gebruikt dat nieuwe traject om een fotorealistische scène weer te geven. Om dit te doen, het maakt gebruik van een convolutioneel neuraal netwerk - dat vaak wordt gebruikt voor beeldverwerkingstaken - om een dieptekaart te schatten, die informatie bevat met betrekking tot de afstand van objecten vanuit het oogpunt van de controller. Vervolgens combineert het de dieptekaart met een techniek die de oriëntatie van de camera in een 3D-scène schat. Dat helpt allemaal om de locatie van het voertuig en de relatieve afstand tot alles in de virtuele simulator te bepalen.
Op basis van die informatie, het heroriënteert de originele pixels om een 3D-weergave van de wereld te creëren vanuit het nieuwe gezichtspunt van het voertuig. Het volgt ook de beweging van de pixels om de beweging van de auto's en mensen vast te leggen, en andere bewegende objecten, in de scène. "Dit staat gelijk aan het voertuig voorzien van een oneindig aantal mogelijke trajecten, " zegt Rus. "Omdat wanneer we fysieke gegevens verzamelen, we krijgen gegevens van het specifieke traject dat de auto zal volgen. Maar we kunnen dat traject aanpassen om alle mogelijke manieren en omgevingen van rijden te bestrijken. Dat is echt krachtig."
Versterking leren vanaf het begin
traditioneel, onderzoekers hebben autonome voertuigen getraind door ofwel door mensen gedefinieerde rijregels te volgen of door te proberen menselijke chauffeurs te imiteren. Maar de onderzoekers laten hun controller helemaal opnieuw leren onder een "end-to-end" raamwerk, wat betekent dat het alleen onbewerkte sensorgegevens als invoer nodig heeft, zoals visuele waarnemingen van de weg, en uit die gegevens, voorspelt stuurcommando's bij uitgangen.
"We zeggen eigenlijk 'Hier is een omgeving. Je kunt doen wat je wilt. Gewoon niet tegen voertuigen botsen, en blijf binnen de rijstroken, ', zegt Amini.
Dit vereist "reinforcement learning" (RL), een trial-and-error machine learning-techniek die feedback geeft wanneer de auto een fout maakt. In de simulatie-engine van de onderzoekers, de controller begint met niets te weten over hoe te rijden, wat een rijstrookmarkering is, of zelfs andere voertuigen eruit zien, dus het begint willekeurige stuurhoeken uit te voeren. Het krijgt alleen een feedbacksignaal als het crasht. Op dat punt, het wordt geteleporteerd naar een nieuwe gesimuleerde locatie en moet een betere set stuurhoeken uitvoeren om te voorkomen dat het opnieuw crasht. Meer dan 10 tot 15 uur training, het gebruikt deze schaarse feedbacksignalen om steeds grotere afstanden af te leggen zonder te crashen.
Na succesvol 10 gereden te hebben, 000 kilometer in simulatie, de auteurs passen die aangeleerde controller toe op hun volledige autonome voertuig in de echte wereld. De onderzoekers zeggen dat dit de eerste keer is dat een controller die is getraind met behulp van end-to-end versterkingsleren in simulatie, met succes is ingezet op een volledige autonome auto. "Dat was verrassend voor ons. Niet alleen heeft de controller nog nooit op een echte auto gezeten, maar het heeft ook nog nooit de wegen gezien en heeft geen voorkennis over hoe mensen rijden, ' zegt Amini.
Door de controller te dwingen alle soorten rijscenario's te doorlopen, kon hij de controle terugkrijgen vanuit desoriënterende posities - zoals half van de weg of in een andere rijstrook - en binnen enkele seconden terugsturen naar de juiste rijstrook. "En andere state-of-the-art controllers faalden daar allemaal tragisch in, omdat ze dergelijke gegevens nog nooit hebben gezien in training, ' zegt Amini.
Volgende, de onderzoekers hopen alle soorten wegomstandigheden te simuleren vanuit een enkel rijtraject, zoals dag en nacht, en zonnig en regenachtig weer. Ze hopen ook complexere interacties met andere voertuigen op de weg te simuleren. "Wat als andere auto's beginnen te rijden en voor het voertuig springen?" zegt Rus. "Dat zijn complexe real-world interacties die we willen gaan testen."
 3D-geprinte weefsels en organen zonder de steigers
3D-geprinte weefsels en organen zonder de steigers- Onderzoek kan de kosten van elektronenbronnen drastisch verlagen
- Heeft water zich uitgezet of krimpt bij verhitting?
- De oorzaak van capaciteitsverlies vinden in een metaaloxide batterijmateriaal
- Tale of the tape:plakkerige stukjes zorgen voor betere batterijen
- Woede in het zuiden van Nigeria over vertraging bij het opruimen van olieramp
- Fast fashion-leugens:zullen ze echt hun leven veranderen in een klimaatcrisis?
- Oproep voor Australië om een nulvervuilingsdoel te stellen
- Tekenen van leven bij niemandsland rond Filippijnse vulkaan
- Nieuw aluminiumhydroxide stabiel bij extreem hoge druk
Hoofdlijnen
- Bron van Beperking Enzymes
- Welke functie vervullen spillen tijdens mitose?
- Nieuwe manier om te voorkomen dat genetisch gemanipuleerde en ongewijzigde organismen nakomelingen produceren
- Crunchtijd voor voedselzekerheid
- Wat zijn enkele voor- en nadelen van het gebruik van DNA-analyse om rechtshandhaving bij criminaliteit te bevorderen?
- Robuuste kaken en verpletterende beten zorgen ervoor dat zeeotters hun dieet kunnen specialiseren
- Meer dan een getallenspel:nieuwe techniek meet microbiële gemeenschappen op biomassa
- Maki's zijn raar omdat het fruit van Madagascar raar is
- Episch taaie baobabbomen sterven af in Afrika
- Ingenieurs ontwikkelen milieuvriendelijke slimme glaspanelen die overschakelen van transparant naar ondoorzichtig

- AlphaZero wil gewoon spelen

- Amazon zet groot in op India met megakantoor

- Social distancing-app gebruikt ruimte om levens te redden
- Mysterie van negatieve capaciteit in perovskiet-zonnecellen opgelost


 Studeer in het buitenland programma studenten ontwikkelen onderzoeksvaardigheden ondanks dat ze geaard zijn
Studeer in het buitenland programma studenten ontwikkelen onderzoeksvaardigheden ondanks dat ze geaard zijn- Betere beslissingen nemen over sociale huisvesting
- Behandeling met nanotechnologie is veelbelovend tegen multiple sclerose
- Natuurkundigen verklaren metallische geleidbaarheid van dunne koolstof nanobuisfilms
- Mieren van Ohio
- Nieuwe inzichten in grafeen en organische composieten in elektronica
- Wat ligt er onder de andere kant van de maan?
- Magische vezels:een onderzoeker werkt aan het maken van slimme stoffen die van kleur kunnen veranderen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
