Wetenschap
Een simulatieraamwerk voor het nabootsen van vleermuisgedrag in quad-rotor UAV's
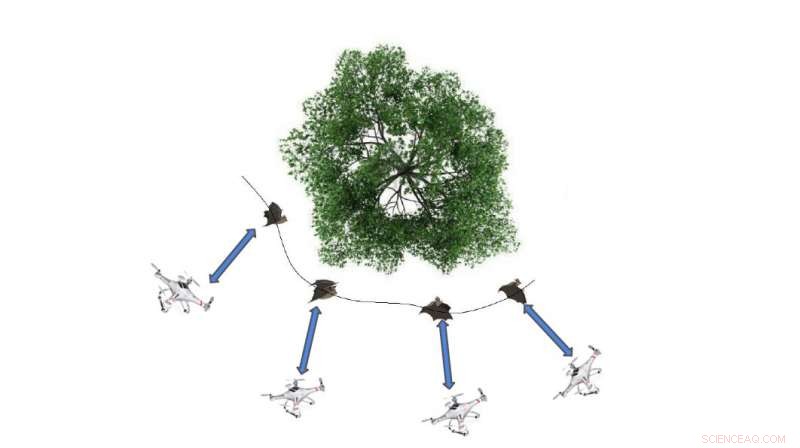
Een quad-rotor UAV die over een boom navigeert, het nabootsen van vleermuisgedrag. Krediet:Tanveer et al.
In recente jaren, onderzoekers over de hele wereld hebben geprobeerd computertechnieken te ontwikkelen die het gedrag van mensen of dieren in robots en machines reproduceren. Dit bevat, bijvoorbeeld, de structuur en werking van het menselijk brein, het zwermcommunicatievermogen van bijen, de voortbewegingsstijlen van specifieke soorten vissen of amfibieën, en nog veel meer.
Voortbouwend op de resultaten van eerdere studies, onderzoekers van Virginia Tech en de Universiteit van Maryland hebben onlangs een simulatieraamwerk geïntroduceerd dat kan worden gebruikt om het gedrag van vleermuizen na te bootsen in quad-rotor UAV's. Dit model, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, is ontstaan uit een samenwerking tussen Rolf Müller, een expert in biosonardetectie, statistici Xiaowei Wu en Hongxiao Zhu, en computerwetenschapper Pratap Tokekar, gefinancierd door de National Science Foundation (NSF).
"Ons algemene idee was om UAV's te bouwen die het gedrag van een vleermuis kunnen nabootsen tijdens het navigeren door complexe, natuurlijke omgevingen, " vertelde Zhu aan TechXplore. "In deze specifieke studie, ons belangrijkste doel was om een computationeel raamwerk te bouwen om de waarnemingsomgevingen van vleermuizen te simuleren en gesimuleerde biosonarsignalen te produceren voor trainings- en testdoeleinden."
Het door Zhu en haar collega's ontwikkelde simulatieraamwerk bestaat uit een model voor het simuleren van de geometrie van willekeurige bossen met bomen en een model dat biosonarsignalen genereert. Biosonarsignalen zijn korte geluiden geproduceerd door vleermuizen en andere dieren, waaronder walvissen en dolfijnen. Deze geluiden genereren echo's die waardevolle informatie bevatten over de omgeving, dieren helpen bij hun navigatie, evenals in hun jacht- en foerageerinspanningen.
Het eerste onderdeel van het nieuwe framework is een model dat gedetailleerde informatie geeft over willekeurige omgevingen. De tweede component bootst de biologische mechanismen na die biosonar-geleide navigatie bij vleermuizen mogelijk maken, het produceren van gesimuleerde echo's die informatie bevatten over de omgeving van de robot.
De simulatie-aanpak die Zhu en haar collega's hebben bedacht, heeft verschillende unieke kenmerken en voordelen. Een van de meest opmerkelijke is dat willekeurige simulaties herhaaldelijk kunnen worden uitgevoerd, het kan dus rijke sensorische gegevens produceren die moeilijker te verzamelen zijn met meer traditionele experimentele benaderingen.
"De belangrijkste successen van robotica tot nu toe zijn in beperkte, gestructureerde omgevingen zoals magazijnen en industriële omgevingen, "Tokekar, mede-onderzoeker van het onderzoek, vertelde TechXplore. "Er is veel interesse in het gebruik van UAV's in ongestructureerde omgevingen zoals bossen en dichtbegroeide gebieden. Om maar twee voorbeelden te noemen:DARPA heeft onlangs hun Fast, lichtgewicht, Autonomie programma, waar, zoals hetzelfde suggereert, de nadruk lag op behendige UAV's die opereren in bosrijke omgevingen, terwijl het Army Research Lab een nieuw programma aankondigde, SARA genaamd, met een vergelijkbaar doel voor ogen."
Volgens Tokekar, de natuur biedt talloze voorbeelden van gedragingen die, indien kunstmatig gerepliceerd, kan zeer nuttig zijn in robotica-toepassingen. De biosonar-geassisteerde navigatiecapaciteiten waargenomen bij vleermuizen, waarop hun studie zich richt, zou specifiek kunnen helpen om de navigatie en objectdetectie in vliegende robots te verbeteren.
In de toekomst, het simulatieplatform ontwikkeld door Zhu, Tokekar en hun collega's zouden kunnen worden gebruikt om dit specifieke vleermuisgedrag te repliceren in autonome quad-rotor UAV's. In aanvulling, het zou onderzoekers kunnen helpen bij het evalueren en vergelijken van verschillende op vleermuizen geïnspireerde navigatie-algoritmen binnen gesimuleerde omgevingen.
"Het meest betekenisvolle aspect van ons werk is dat het een handig platform biedt voor het trainen en testen van bio-geïnspireerde robotalgoritmen voor UAV's, " zei Zhu. "In onze volgende studies, we zijn van plan robotalgoritmen voor verschillende navigatietaken te trainen en te testen met behulp van de Biosonar-gegevens die in dit kader worden gegenereerd."
© 2020 Wetenschap X Netwerk
 Een innovatief proces voorkomt onomkeerbaar energieverlies in batterijen
Een innovatief proces voorkomt onomkeerbaar energieverlies in batterijen- Hoe te weten of een element een positieve of negatieve lading heeft
- Eenvoudige methode om koolstofdioxide om te zetten in bruikbare verbindingen
- Gebruik maken van de zon om vers water te brengen naar afgelegen of door rampen getroffen gemeenschappen
- Een mijlpaal in ultrasnelle gelfabricage van onconventionele zelfherstellende edelmetaalgels
- Kritieke temperatuur voor de levensduur van tropische bomen onthuld
- NASA ziet sterkere tropische cycloon 33W op weg naar Vietnam
- Onderzoek toont aan dat marktgebaseerde strategieën voor het behoud van ecosystemen toenemen
- Nieuwe kaarten van Maleisisch Borneo onthullen verslechterende koolstofverliezen langs bosranden
- Soorten fysieke omgevingen
Hoofdlijnen
- Wat zijn twee kenmerken van mRNA in eukaryoten?
- Studie vindt nieuwe manier om radioactieve sites op te ruimen, bescherming van radiotherapiepatiënten, astronauten
- Moeder-kind linkerzijde face-to-face voorkeur bleek zich uit te strekken tot walrussen en Indiase vliegende vossen
- De voor- en nadelen van het Bacillus-expressiesysteem
- Parasieten van huisdieren die dieren in het wild wereldwijd aantasten
- Losse huid en slap volume beschermen Hagfish tegen haaienbeten
- Hoe zijn genen, DNA en chromosomen met elkaar verbonden?
- Zeldzame vliegende vossen neergeschoten bij gruwelijke aanval in Australië
- Ziekteverwekkers identificeren die sojastamkanker veroorzaken
- Hoe kunstmatige intelligentie het werk opnieuw uitvindt

- Onderzoekers stappen terug op de virale golf van mannequins om diepte te verkennen

- Technologie om heteluchtballonnen te gebruiken voor raketlanceringen concurreert in een startup-slagveld

- Facebook:de meeste gebruikers hebben mogelijk openbare gegevens geschraapt

- Onderzoek om mobiele telefoons slimmer te laten werken en langer mee te laten gaan


 De lange en de korte van DNA-replicatie
De lange en de korte van DNA-replicatie- Wat zijn de toepassingen van slingers?
Je hebt waarschijnlijk niet veel nagedacht over slingers omdat je Vincent Price het laatst hebt gepakt in 'The Pit and the Pendulum' op de televisie. Pendels zijn eigenlijk elke dag aan het werk in de bouw, re
- Metalen gebruiken als brandstof
- In nanorod kristalgroei, nanodeeltjes gezien als kunstmatige atomen
- Wetenschappers ontdekken eiwitten die stamcellen in hun ongedifferentieerde staat houden
- Kijken naar vloeibare cellen in variabele zwaartekracht
- Een van de grote puzzels van de natuur oplossen:wat drijft de versnelde uitdijing van het universum?
- Oorsprongsverhaal:de menselijke geschiedenis herschrijven door middel van DNA
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
